

На рис.2.5 представлена диаграмма Боде исследуемой дискретно системы, с отмеченными на ней запасами устойчивости по амплитуде и фазе.

Рис. 2.4

Рис.2.5
III исследование нелинейной непрерывной системы автоматического управления
Задание:
Используя метод гармонической линеаризации нелинейного элемента, определить на основе частотного способа возможность возникновения автоколебаний в замкнутой системе, их устойчивость, амплитуду и частоту.
Исходные данные:
Структура нелинейной САУ представлена на рис. 3.1, где НЭ— нелинейный элемент, W(s) - передаточная функция непрерывной линейной части системы.
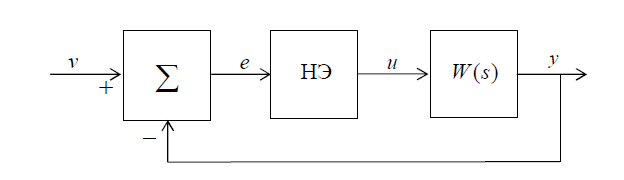
Рис 3.1
1. Передаточная функция W0(s) берется из пункта 1, как передаточная функция скорректированной системы с соответствующими числовыми коэффициентами. Нелинейный элемент НЭ имеет нелинейную характеристику u=f(e) которая для всех заданий является характеристикой идеального реле:
 (1.1)
(1.1)
где с=3.
Приближенная передаточная функция нелинейного элемента для случая идеальное реле имеет вид:
 (1.2)
(1.2)
где a – амплитуда искомого периодического режима, а>0.
2. На комплексной плоскости строим характеристику:
 (1.3)
(1.3)
Это прямая, совпадающая с отрицательным отрезком действительной оси, вдоль которой идет оцифровка по амплитуде а0 = 0, a1, a2, …. В том же масштабе на комплексной плоскости строится АФЧХ разомкнутой системы W0(jw) при изменении частоты от 0 до + inf.
Передаточная функция скорректированной системы:



На рис.3.2 (выделен интересующий фрагмент) пунктиром отмечена АФЧХ

рис.3.2
Точка пересечения кривых (-0.117, 0j).
В
точке пересечения АФЧХ W0(jw)
и
прямой
 по
графику W(jw)
нашли
частоту искомого периодического
(гармонического) режима ω=ω*,
а
на
прямой
по
графику W(jw)
нашли
частоту искомого периодического
(гармонического) режима ω=ω*,
а
на
прямой
 в
точке пересечения его амплитуда а
= а*.
Тогда
в системе существуют
периодические колебания:
в
точке пересечения его амплитуда а
= а*.
Тогда
в системе существуют
периодические колебания:
 (1.4)
(1.4)
Приравнивая Im(W0(jω)) = 0 находим w =3.09 (функция fsolve). При найденном значении частоты получим Re(W0(jω))= -0.117. Из условия
 (1.5)
(1.5)
находим а =0.298.
Для
определения устойчивости периодического
режима можно воспользоваться
следующим правилом: если при увеличении
амплитуды а
вдоль
кривой
 пересечение АФЧХW0(jw)
происходит
«изнутри наружу», то такой
периодический режим будет устойчивым,
т.е. в системе существуют автоколебания
с частотой w*
и амплитудой а*
.
пересечение АФЧХW0(jw)
происходит
«изнутри наружу», то такой
периодический режим будет устойчивым,
т.е. в системе существуют автоколебания
с частотой w*
и амплитудой а*
.
Таким образом, периодический режим будет устойчивым.
Литература
1. Теория автоматического управления. Конспект лекций: В 2ч. Ч.1: Линейные непрерывные системы: учеб.-метод. пособие / В.П. Кузнецов, С.В Лукьянец,
М.А. Крупская. - Мн.: БГУИР, 2007. - 132 с.
2. Кузнецов, В.П. Линейные непрерывные системы: Тексты лекций по курсу: Теория автоматического управления.-Мн.: БГУИР, 1995.-180 с.
3. Электронный учебно-методический комплекс: Теория автоматического управления. Ч.1: Линейные непрерывные системы./ В.П. Кузнецов, С.В. Лукьянец, М.А. Крупская - Мн.: БГУИР, 2006.
4. Электронный учебно-методический комплекс: Теория автоматического управления 4.2.: Дискретные, нелинейные, оптимальные и адаптивные системы
/С. В. Лукьянец, А. Т. Доманов, В.П. Кузнецов, М. А. Крупская/ - Мн.: БГУИР, 2007.
5. Кузнецов, В.П. Линейные импульсные системы: Математическое описание: Тексты лекций по курсу „Теория автоматического управления". - Мн.: БГУИР, 1996.-70 с.
6. Бесекерский, В.А. Теория автоматического управления / В.А. Бесекерский, Е.П. Попов. - СПб: Профессия, 2004.
6а. Кузин Л.Т. Расчет и проектирование дискретных систем управления. -М.: ГНТИ Машиностроительной литературы. 1969.
7. Теория автоматического управления. Ч.1./ под ред. А.А. Воронова. — М.: Высш. шк., 1986.
8. Теория автоматического управления. Ч.2. / Под ред. А.А. Воронова. — М.: Высш. шк., 1986.
9. Теория автоматического управления: учеб. Пособие для вузов / А.С. Востриков, Г.А. Французова. - М.: Высш. шк., 2004.
10. Иванов, В.А., Ющенко, А.С. Теория дискретных систем автоматического управления. - М.: Физматгиз, 1983.
11. Медведев, В. С, Потемкин, В. Г. Control System Toolbox. Matlab 5 для студентов. -М.: Диалог-МИФИ, 1999.
12. Автоматизированный расчёт систем управления. Методическое пособие к лабораторным работам для студентов специальностей 53 01 03 «Автоматическое управление в технических системах» и 53 01 07 «Информационные технологии и управление в технических системах» всех форм обучения/М.А.Антипова, М.К.Хаджинов. - Мн.: БГУИР, 2003.-38с
13. Лазарев Ю. Ф., Matlab 5.X . -Киев.: Ирина, BHV, 2000. - 382с.
14. Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления с примерами в системе MatLab. - СПб.: Наука, 2000. - 475с
15. Материалы сайта www.exponenta.ru