

14. Линейные регуляторы.
Линейные регуляторы – это так называемые PID-регуляторы, т.е. динамические звенья описаны следующими уравнениями:
![]()
Где e(t) = x(t)-y(t)
В зависимости от значения K1, K2, K3 получаются усилители, дифференциаторы, интеграторы и другие.
PID-регуляторы доказали свою эффективность в управлении разнообразными процессами. Поэтому 80% применяемых регуляторов в промышленности относится к данному классу. Их синтез и анализ хорошо разработан в классической теории автоматического управления. Однако, для объектов с переменными параметрами, имеющих значительное временное запаздывание, существует нелинейность и большие помехи. Трудно обеспечить необходимое качество управления с помощью PID-регуляторов.
15. Нелинейные регуляторы в сау.
Нелинейные регуляторы. В реальных условиях ранее рассмотренные регуляторы далеко не всегда обеспечивают требуемое качество управления, особенно, когда объектом управления выступает биологический объект или биологическая система. В этих случаях применяются нелинейные регуляторы. Препятствием широкому применению нелинейных регуляторов является отсутствие хорошо отлаженной теории.
В последнее время в этом направлении интенсивно развивается теория динамических систем, которая исследует поведение системы в точках бифуркаций. Эти моменты времени и пространства также называются перемешивающими слоями или джокерами. Прогнозировать поведение системы в этих точках без применения вероятностных законов невозможно. В последнее время в связи с этим делается попытка разработки универсального подхода к синтезу нелинейных систем управления, так называемое интеллектуальное управление. В простейшем виде оно представлено в переключаемых системах.
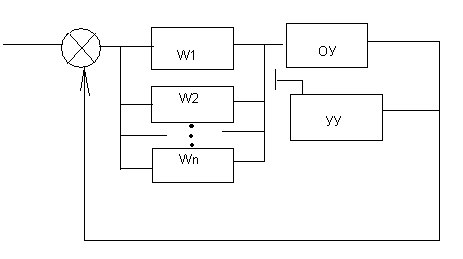
Применение принципа переменной структуры позволяет получить систему, сочетающую в себе не только достоинства переключения систем, но и обладающую новыми уникальными свойствами. Например, если в показанном на рисунке регуляторе W1 обеспечить переходный процесс с большей длительностью, а в других с большим перерегулированием, то в целом можно получить систему с монотонным переходным процессом малой длительности. Таким образом принцип переменной структуры позволяет обеспечить высококачественное управление в широком диапазоне.
Частный случай при этом является параметрическая обратная связь. Например:
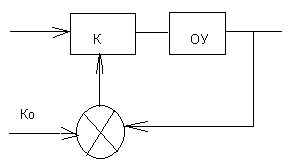
Простейший пример параметрической обратной связи – это билинейная обратная связь, при которой сигнал обратной связи вводится путем перемножения E = xy.
Логарифмическая обратная связь обеспечивает сигнал обратной связи посредством деления. Большинство свойств систем с переменной структурой достигается засчет использования скользящего режима, при котором структура изменяется по мере приближения к границе нормального функционирования. Однако практическая реализация часто бывает невозможна, так как в области высоких частот параметры приводят к возникновению биений и потере равновесия.
Устойчивая система
Неустойчивая система
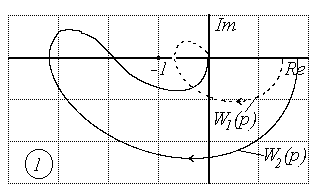
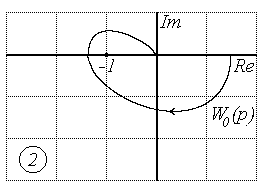
Разомкнутая система может быть неустойчива, но это не означает, что неустойчивой будет и замкнутая. В этом случае меняется формулировка критерия Найквиста: для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно - фазовая характеристика неустойчивой разомкнутой системы при изменении от 0 до охватывала точку с координатами {-1, j0} в положительном направлении r/2 раз, где r число корней характеристического уравнения разомкнутой системы с положительной вещественной частью.
Логарифмическая формулировка критерия Найквиста:
Формулировка
Для замкнутой
системы необходимо и достаточно, чтобы
на частотах, где ЛАЧХ
положительна (то есть L(
)
> 0), фазовая
частотная характеристика
разомкнутой системы не пересекала
прямую параллельную оси абсцисс и
проходящую через значение (-![]() )
или пересекала ее четное число раз.
)
или пересекала ее четное число раз.
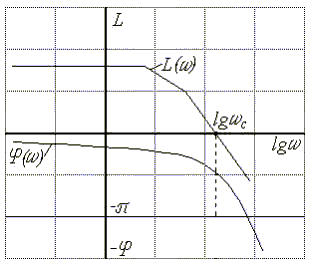
Замкнутая система
будет находиться на границе устойчивости,
если на той же частоте, где
![]() ,
фазовая частотная характеристика
разомкнутой системы принимает значение
(
,
фазовая частотная характеристика
разомкнутой системы принимает значение
(![]() ).
).