

2.4.2 Указания по выполнению задания к-4
Из задач, решаемых по этой теме, необходимо обратить особое внимание на задачи с плоскими механизмами, состоящими из нескольких звеньев.
Механизм, движение которого исследуется, надо изобразить на рисунке в том положении, для которого требуется определить соответствующие характеристики. При решении кинематических задач плоского многозвенного механизма рекомендуется придерживаться нижеследующего порядка.
1. Выяснить число тел (звеньев), входящих в данный механизм и вид движения каждого из них.
2. Установить тело, движение которого задано (ведущее звено). Для этого в теле определить все величины, указанные в условии задачи, затем найти скорость точки, соединяющей это тело с последующим.
3. Перейти к рассмотрению следующего тела, в котором уже известна скорость одной точки (общей с первым телом). Если из вида движения будет найдено хотя бы направление скорости еще одной точки (например, известна траектория точки), применить к этой точке теорему о скорости, выбрав за полюс точку, скорость которой известна. Далее из этого равенства определить угловую скорость тела. После этого по вышеупомянутой теореме определить скорости точек, указанных в условии задачи, а затем скорость точки, соединяющей это тело со следующим.
4. Перейти к следующему телу, далее см. выше п. 3.
Примечания:
1. Решение задачи об ускорениях производится после решения задачи о скоростях. Порядок решения аналогичен вышеприведенному.
2. Если тело, к которому перешли, совершает поступательное движение, то достаточно ранее найденных величин.
МЦС (мгновенный центр скоростей) определяется для каждого звена в отдельности; то же относится к угловым скоростям и угловым ускорениям.
Найденное значение скорости точки не является величиной постоянной. Это - значение скорости точки только в данный момент времени (мгновенное).
При этом ускорение точки может быть не равным нулю, что относится и к угловой скорости звена.
В ниже приведенных примерах расчет скорости сделан двумя способами: применением теоремы о скорости точки плоской фигуры и применением метода МЦС, а ускорения – только применением теоремы.
2.4.3 Примеры выполнения задания к-4
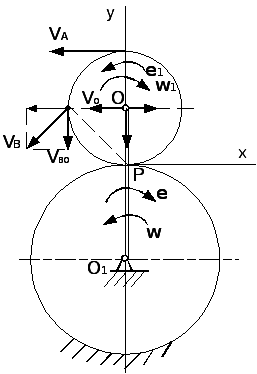
Пример К-4.1. Кривошип О1О = l вращается вокруг оси, проходящей через точку О1 имеет в данный момент угловую скорость и угловое ускорение ε (рис. 3.96 а). На палец О этого кривошипа свободно насажено колесо 1 радиусом r, которое катится без скольжения по неподвижному колесу радиусом R = l - r.
Найти
в данный момент времени угловую скорость
![]() и угловое ускорение
и угловое ускорение![]() колеса1,
скорости и ускорения точек А и В (рис.
2.97).
колеса1,
скорости и ускорения точек А и В (рис.
2.97).
Решение:
Способ 1. Применение теоремы о скорости точки плоской фигуры. Механизм состоит из двух тел: кривошип О1О совершает вращательное движение, колесо 1 совершает плоскопараллельное движение.
Точка
О принадлежит одновременно телу (колесу
1) и кривошипу
О1О,
поэтому в силу
неразрывности кинематических параметров
![]()
![]()
![]() .
.
Переходя
к следующему телу ( колесу 1), будем
помнить, что у этого тела уже известна
скорость одной точки O
–
![]() .
Определим еще скорость точки Р – точки
касания колес. Так как происходит качение
без скольжения, скорости точек касания
двух тел должны быть равны. Поскольку
одно из колес (радиусом R)
неподвижно, то
.
Определим еще скорость точки Р – точки
касания колес. Так как происходит качение
без скольжения, скорости точек касания
двух тел должны быть равны. Поскольку
одно из колес (радиусом R)
неподвижно, то
![]() =
0. Применим к
точке Р теорему о скорости точки плоской
фигуры, взяв точку О за полюс:
=
0. Применим к
точке Р теорему о скорости точки плоской
фигуры, взяв точку О за полюс:
![]() (2.5)
(2.5)
где
![]()
![]()
В
данном случае легко угадать направление
![]() ,
следовательно, и направление скорости
,
следовательно, и направление скорости![]() .
В принципе,
.
В принципе,
![]() можно направить перпендикулярно к РО
произвольно. Тогда знак
можно направить перпендикулярно к РО
произвольно. Тогда знак![]() покажет, что
если
покажет, что
если
![]() – направление
верно, а если
– направление
верно, а если
![]() направление противоположно выбранному.
направление противоположно выбранному.
|
а) |
б) |
|
Рис. 2.96. Расчетная схема к примеру К.4.1: а - расчетная схема механизма; б - план ускорений
| |




Следует
иметь в виду, что
![]() определяется и направлением
определяется и направлением![]() .
Спроецируем (2.5) на осиx
и у. Поскольку
.
Спроецируем (2.5) на осиx
и у. Поскольку
![]() .
.
После этого можем найти скорость любой точки колеса 1, например, А и В, применяя к ним теорему о скорости точки плоской фигуры, взяв точку О за полюс:
![]() ,
(2.6)
,
(2.6)
где
![]()
![]() .
.
Направление
![]() определяется
направлением
определяется
направлением![]() ,
а модуль вектора
,
а модуль вектора![]() неизвестен. Проецируя (2.6)
на оси координат x
и у, получим:
неизвестен. Проецируя (2.6)
на оси координат x
и у, получим:
![]()
тогда![]()
Так
как
![]() < 0,
то направление вектора
< 0,
то направление вектора
![]() противоположно осиx.
противоположно осиx.
Аналогично рассчитывается скорость точки В:
![]() .
(2.7)
.
(2.7)
Проецируя (2.7) на оси x и у, получим:
Направляющие косинусы определяются формулами:
Способ 2. Метод МЦС(мгновенный центр скоростей) и определение ускорений.
Для
решения задачи рассматриваем движение
колеса 1.
По данным задачи легко найти скорость
![]() и ускорения
и ускорения![]() точкиO
этого колеса, которую принимаем за
полюс.
точкиO
этого колеса, которую принимаем за
полюс.
Определение
![]() и
и
![]() .
Зная
и
кривошипа,
находим:
.
Зная
и
кривошипа,
находим:
![]()
![]()
![]()
![]()
Направления
векторов
![]() и
и![]() определяются
направлением
определяются
направлением
![]() и
и![]() ,
вектор
,
вектор![]() направлен от
О к О1.
Показываем их на рисунке.
направлен от
О к О1.
Показываем их на рисунке.
Определение
![]()
![]() ,
,
![]() .
Точка Р зацепления колес является МЦС
для шестерни
1. Следовательно,
угловая скорость шестерни равна:
.
Точка Р зацепления колес является МЦС
для шестерни
1. Следовательно,
угловая скорость шестерни равна:
![]() ,
,
а
направление
![]() определяется направлением
определяется направлением![]()
Зная
![]() и положение МЦС колеса1,
находим скорости точек А и В:
и положение МЦС колеса1,
находим скорости точек А и В:
![]()
Векторы
![]() и
и![]() направлены перпендикулярно АР и ВР, и
их направления определяются направлением
направлены перпендикулярно АР и ВР, и
их направления определяются направлением![]() .
.
Определение
![]() .
Так как в
выражении для линейного ускорения а
величина ОР =
r
остается постоянной при любом положении
колеса 1,
то
.
Так как в
выражении для линейного ускорения а
величина ОР =
r
остается постоянной при любом положении
колеса 1,
то
![]() .
.
Векторы
![]() и
и![]() направлены в разные стороны, так как
вращение колеса1
– замедленное,
направлены в разные стороны, так как
вращение колеса1
– замедленное,
![]() направлено противоположно
направлено противоположно![]() .
.
Определение ускорений точек А и В. Рассматривая колесо 1 и принимая точку О за полюс, имеем:
![]()
![]()
Находим:
Векторы
![]() и
и![]() направлены от
рассматриваемых точек к полюсу, а векторы
направлены от
рассматриваемых точек к полюсу, а векторы
![]() и
и
![]() перпендикулярны к ним, и их направления
определяются направлением
перпендикулярны к ним, и их направления
определяются направлением![]() (см. рис. 2.96,б).
(см. рис. 2.96,б).
Изображаем на рисунке все векторы, из которых слагаются ускорения точек А и В. Спроецировав (2.8) и (2.9) на оси координат, получим:
![]()
![]()
![]()
![]()
Ответ:
![]()
![]()
![]() .
.
Пример К-4.2. Механизм состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и с неподвижными опорами O1 и O2 шарнирами (рис. 2.97), точка Д находится в середине стержня 2.
Длины
стержней равны соответственно: l1
= 0,4 м, l2
= 1,2 м,
l3
= 1,4 м, l4
= 0,6 м. Для
положения механизма, показанного на
рисунке, по известной угловой скорости
![]() = 2c-1
угловому ускорению
= 2c-1
угловому ускорению
![]() = 4 с-2
стержня O1А
в данный момент времени найти скорости
= 4 с-2
стержня O1А
в данный момент времени найти скорости
![]() и
и![]() точек В и Е, угловую скорость
точек В и Е, угловую скорость![]() и угловое ускорение
и угловое ускорение![]() звена АВ, а также ускорение
звена АВ, а также ускорение![]() точки В.
точки В.
Решение:
Механизм
образуют четыре тела:
1 – О1А
совершает вращательное движение; 2
– АВ совершает плоскопараллельное
движение; 3
– ДЕ совершает плоскопараллельное
движение; 4
– O2Е
совершает вращательное движение.
Начинаем с рассмотрения движения
тела 1,
найдем
![]() .
Точка А принадлежит телу О1А,
совершающему вращательное движение,
поэтому
.
Точка А принадлежит телу О1А,
совершающему вращательное движение,
поэтому
![]()
![]()
![]()
Перейдем
к телу 2.
Зная направление вектора скорости точки
А (![]() ),
можем указать
направление вектора скорости точки В
(
),
можем указать
направление вектора скорости точки В
(![]() )
– по направляющей, в ту или другую
сторону. Предположительно выберем
направление
)
– по направляющей, в ту или другую
сторону. Предположительно выберем
направление![]() .
Применив к точке В теорему скоростей
и взяв точку А за полюс, получим:
.
Применив к точке В теорему скоростей
и взяв точку А за полюс, получим:
![]() (2.10)
(2.10)
где
![]()
![]() .
.
Направление
![]() выберем
предположительно. Спроецируем (2.10) на
оси координат (xBу):
выберем
предположительно. Спроецируем (2.10) на
оси координат (xBу):
![]()
![]()
![]()
![]()
![]() –это
означает, что предварительно выбранные
направления соответствуют истинным.
Угловая скорость вращения шатуна АВ:
–это
означает, что предварительно выбранные
направления соответствуют истинным.
Угловая скорость вращения шатуна АВ:
![]()
![]() .
.
Знак
![]() показывает, что направление
показывает, что направление![]() противоположно направлению вращения
часовой стрелки.
противоположно направлению вращения
часовой стрелки.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
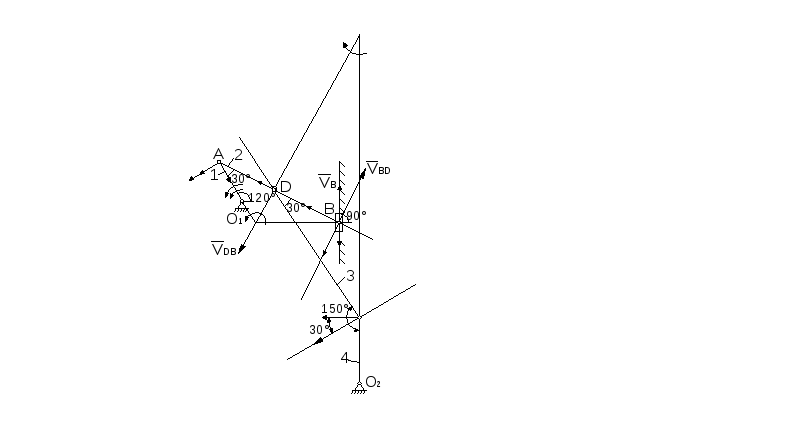

















Рис. 2.97. Расчетная схема к примеру К-4.2.
Найдем
![]() по
теореме, взяв за полюс точку В:
по
теореме, взяв за полюс точку В:
![]() ,
(2.11)
,
(2.11)
где
![]()
![]() .
.
Направление
![]() находится в соответствии с направлением
находится в соответствии с направлением![]() .
.
Спроецируем
(2.11) на оси координат, направление и
величина скорости
![]() неизвестны:
неизвестны:
![]()
![]()
Так
как
![]() ,
то вектор скорости
,
то вектор скорости![]() лежит на осиx,
причем
лежит на осиx,
причем
![]() .
Следовательно, направление
.
Следовательно, направление![]() противоположено направлению оси х.
противоположено направлению оси х.
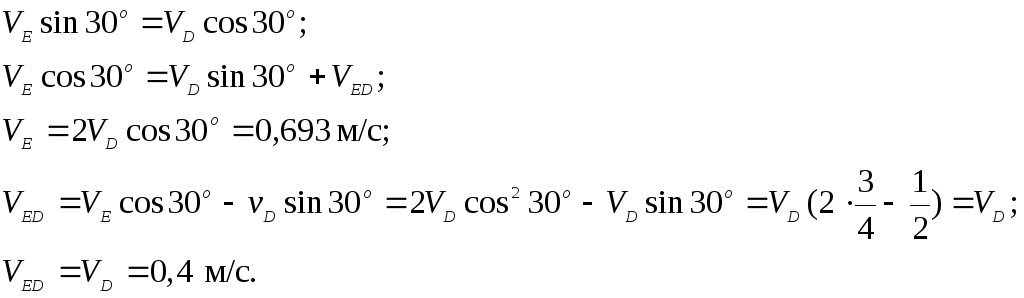
Определим
![]() ,
для этого рассмотрим стержень ДЕ, зная
,
для этого рассмотрим стержень ДЕ, зная![]() и направление
и направление![]() ,
так как точка E
принадлежит стержню ЕО2,
который
совершает
вращательное движение. Направление
,
так как точка E
принадлежит стержню ЕО2,
который
совершает
вращательное движение. Направление
![]() выберем
предположительно. Выбирая Д полюсом и
применяя к точке Е теорему о скорости
точки плоской фигуры, получим:
выберем
предположительно. Выбирая Д полюсом и
применяя к точке Е теорему о скорости
точки плоской фигуры, получим:
![]()
где
![]()
![]() .
.
Предположительно
выбрав направление
![]() и проецируя векторное равенство на оси
координатx
и y,
получим:
и проецируя векторное равенство на оси
координатx
и y,
получим:
Так
как
![]() ,
то предположительно выбранные направления
соответствуют действительным.
,
то предположительно выбранные направления
соответствуют действительным.
![]()
![]() ,
и направление ED
совпадает с направлением вращения
часовой стрелки (см. направление
,
и направление ED
совпадает с направлением вращения
часовой стрелки (см. направление
![]() ).
).
Определение
![]() .
Предварительно находим скорость точки
А:
.
Предварительно находим скорость точки
А:
![]()
![]() .
.
Направление
![]() определяется направлением
определяется направлением![]() .
.
Для
определения
![]() воспользуемся теоремой о проекции
скоростей двух точек стержня АВ на
прямую, проходящую через точкиA
и В. Направление скорости
воспользуемся теоремой о проекции
скоростей двух точек стержня АВ на
прямую, проходящую через точкиA
и В. Направление скорости
![]() известно. Находим:
известно. Находим:
![]() отсюда
отсюда
![]()
![]() .
.
Определение
![]() .
Находим
положение МЦС –
точка Р2
звена АВ, восстанавливая из точек А и В
перпендикуляры к
.
Находим
положение МЦС –
точка Р2
звена АВ, восстанавливая из точек А и В
перпендикуляры к
![]() и
и![]() .
Рассчитываем: АР2
= АD/соs30°
= 0,69м,
.
Рассчитываем: АР2
= АD/соs30°
= 0,69м,
![]() АР2
= 1,16 с-1.
Направление
АР2
= 1,16 с-1.
Направление
![]() определяется направлением
определяется направлением![]() .
.
Определение
![]() .
Точка Е
принадлежит
стержню ДЕ. Следовательно, для определения
.
Точка Е
принадлежит
стержню ДЕ. Следовательно, для определения
![]() надо предварительно найти
надо предварительно найти![]() .
Так как точка Д принадлежит одновременно
стержням АВ и ДЕ, и нет разрыва параметров,
то:
.
Так как точка Д принадлежит одновременно
стержням АВ и ДЕ, и нет разрыва параметров,
то:
![]() ДР2
= (
ДР2
= (![]() /АР2)
ДР2
= 0,40 м/с.
/АР2)
ДР2
= 0,40 м/с.
Вектор
![]() перпендикулярен к отрезку Р2Д
и направлен в соответствии с направлением
угловой скорости
перпендикулярен к отрезку Р2Д
и направлен в соответствии с направлением
угловой скорости
![]() .
.
Так
как точка Е
принадлежит
стержню О2Е,
вращающемуся
вокруг точки С2,
то
![]() О2Е.
Но точка Е одновременно принадлежит и
ДЕ, поэтому, восстанавливая из точек Д
и Е перпендикуляры к
О2Е.
Но точка Е одновременно принадлежит и
ДЕ, поэтому, восстанавливая из точек Д
и Е перпендикуляры к
![]() и
и![]() ,
получаем МЦС – точка Р3
звена ДЕ. Из геометрии следует, что
,
получаем МЦС – точка Р3
звена ДЕ. Из геометрии следует, что![]() ДЕР3
= ДР3Е
= 30°, тогда
ДЕР3
= ДР3Е
= 30°, тогда
![]() ДР3Е
равнобедренный. Составив пропорцию,
находим:
ДР3Е
равнобедренный. Составив пропорцию,
находим:
![]() ;
;
![]() .
.
По
направлению
![]() определяем направление поворота стержня
ДЕ, т.е. направление угловой скорости
определяем направление поворота стержня
ДЕ, т.е. направление угловой скорости
![]() .Вектор
.Вектор
![]() будет направлен в сторону поворота
стержня ДЕ перпендикулярно к Р3Е.
будет направлен в сторону поворота
стержня ДЕ перпендикулярно к Р3Е.
Определение
![]() .
Находим сначала
ускорение точки А:
.
Находим сначала
ускорение точки А:
![]()
![]()
Вектор
![]() направлен вдоль АО1,
а
направлен вдоль АО1,
а
![]() - перпендикулярно к АО1;
изображаем эти векторы на рисунке.
- перпендикулярно к АО1;
изображаем эти векторы на рисунке.
Приняв А за полюс и применяя теорему об ускорении к точке В, получим:
![]() .
.
Находим
![]() .
Вектор
.
Вектор
![]() направлен от В к А. Вектор
направлен от В к А. Вектор
![]() направлен перпендикулярно к АВ (конкретное
направление выберем предположительное).
Изображаем на рисунке эти векторы. Для
нахождения
направлен перпендикулярно к АВ (конкретное
направление выберем предположительное).
Изображаем на рисунке эти векторы. Для
нахождения![]() последнее векторное равенство спроецируем
на осьx,
перпендикулярную к
последнее векторное равенство спроецируем
на осьx,
перпендикулярную к
![]() .
.
Так
как точка В
одновременно принадлежит и ползуну,
имеющему направляющие, то предполагаем,
что вектор
![]() направлен вниз:
направлен вниз:
![]()
Отсюда,
подставляя числовые значения всех
величин, находим
![]() .
Знак “минус” указывает, что вектор
.
Знак “минус” указывает, что вектор![]() направлен в сторону, противоположную
направлению, указанному на рисунке.
направлен в сторону, противоположную
направлению, указанному на рисунке.
Определение
![]() .
Сначала
находим
.
Сначала
находим
![]() .
Для этого
последнее векторное равенство спроецируем
на ось Вy:
.
Для этого
последнее векторное равенство спроецируем
на ось Вy:
![]()
Отсюда
находим
![]() =
-3,96 м/с2.
Знак «минус» указывает, что вектор
=
-3,96 м/с2.
Знак «минус» указывает, что вектор
![]() направлен
противоположно направлению, показанному
на рисунке.
направлен
противоположно направлению, показанному
на рисунке.
Из
равенства
![]() определяем:
определяем:![]()
![]()
Так
как
![]() <
0, то
<
0, то
![]() направлено
против движения часовой стрелки
(противоположно первоначально
предполагаемому направлению).
направлено
против движения часовой стрелки
(противоположно первоначально
предполагаемому направлению).
Ответ:
![]() м/с;
м/с;![]()
![]()
![]()
![]() .
.
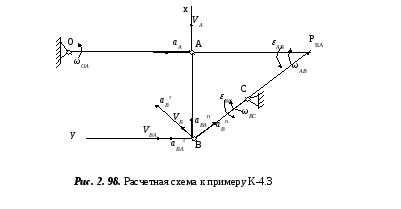
Пример
К-4.3. К
кривошипу, равномерно вращающемуся
вокруг оси О с угловой скоростью
![]() ,
прикреплен шатун АВ с коромыслом ВС
(рис 2.98). Даны размеры: ОА =r
= 0,5 м; АВ =
2r;
ВС = r
,
прикреплен шатун АВ с коромыслом ВС
(рис 2.98). Даны размеры: ОА =r
= 0,5 м; АВ =
2r;
ВС = r![]() ;
;
![]() ОАВ=90°;
ОАВ=90°;![]() АВС=45°.
Определить ускорение точки В, а также
угловую скорость и угловое ускорение
коромысла ВС и шатуна АВ.
АВС=45°.
Определить ускорение точки В, а также
угловую скорость и угловое ускорение
коромысла ВС и шатуна АВ.
Решение:
Рассмотрим
движение тел, образующих механизм:
1 – ОА –
вращательное; 2
– АВ – плоскопараллельное; 3
– ВС –
вращательное. Решение начнем с ОА, найдем
![]() :
:
![]() .
.
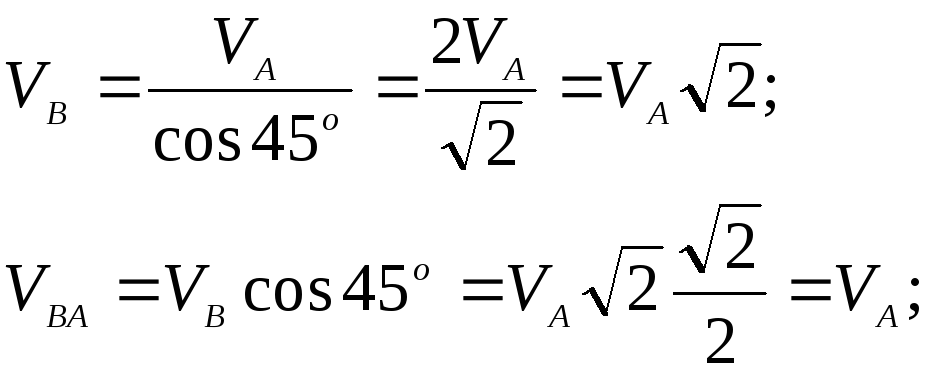
Перейдем
к рассмотрению шатуна АВ: кроме
![]() можем найти направление вектора скорости
можем найти направление вектора скорости![]() .
Так как В
принадлежит ВС, то в его вращательном
движении
.
Так как В
принадлежит ВС, то в его вращательном
движении
![]() но В одновременно принадлежит АВ, тогда
но В одновременно принадлежит АВ, тогда![]() , направление
выберем предположительно.
Проецируя векторное равенство на оси
координат хВу, получим:
, направление
выберем предположительно.
Проецируя векторное равенство на оси
координат хВу, получим:
![]()
![]()
Так
как
![]() и
и![]() ,
предварительно выбранные направления
соответствуют истинным. В соответствии
с направлением
,
предварительно выбранные направления
соответствуют истинным. В соответствии
с направлением![]() угловая скорость
угловая скорость![]() направлена по
ходу часовой стрелки.
направлена по
ходу часовой стрелки.
Точка
В принадлежит коромыслу ВС, поэтому
![]() .
Угловая скорость
.
Угловая скорость![]() направлена по ходу часовой стрелки.
направлена по ходу часовой стрелки.
 Определение
Определение
![]() ,
,
![]() .
Рассматривая
движение шатуна АВ, выберем за полюс
точку А, принадлежащую одновременно и
кривошипу ОА, совершающему вращательное
движение. Для точки А, так как
.
Рассматривая
движение шатуна АВ, выберем за полюс
точку А, принадлежащую одновременно и
кривошипу ОА, совершающему вращательное
движение. Для точки А, так как
![]() ,
получаем:
,
получаем:
![]()
Вектор
![]() перпендикулярен к ОА, его направление
определяется
перпендикулярен к ОА, его направление
определяется![]() ,
а вектор
,
а вектор
![]() направлен от А к О.
направлен от А к О.
Определение
![]() .
В связи с
тем что точка В принадлежит звену ВС,
вектор
.
В связи с
тем что точка В принадлежит звену ВС,
вектор
![]() перпендикулярен к звену ВС. Проводя
перпендикуляры к векторам
перпендикулярен к звену ВС. Проводя
перпендикуляры к векторам![]() и
и![]() ,
получаем МЦС звена АВ –
,
получаем МЦС звена АВ –![]() .
Из
.
Из![]() следует, что
следует, что![]() .
.
Поэтому
![]()
![]()
![]() Направление
поворота показано на рис 2.98.
Направление
поворота показано на рис 2.98.
Определение ускорения точки В. По теореме об ускорениях точки при плоском движении твердого тела имеем:
![]()
В
этом выражении неизвестны направление
и величина
![]() .
Кроме того, неизвестна величина
.
Кроме того, неизвестна величина![]() ,
так как для
определения
,
так как для
определения
![]() нельзя воспользоваться методом МЦС
(расстояние до МЦС от точки А непостоянное),
но легко найти
нельзя воспользоваться методом МЦС
(расстояние до МЦС от точки А непостоянное),
но легко найти![]() .
.
Вычисляемыми
будут только численные значения величин
![]() и
и![]() ,
,
![]() ,
направления
выбираем предположительно. В проекциях
на оси координат последнее векторное
равенство дает два скалярных уравнения,
из которых определяются неизвестные.
,
направления
выбираем предположительно. В проекциях
на оси координат последнее векторное
равенство дает два скалярных уравнения,
из которых определяются неизвестные.
Предварительно
найдем
![]() и
и
![]() .
.
Определение
![]() .
Зная
.
Зная
![]() ,
находим:
,
находим:
![]()
![]()
Вектор
![]() направлен от
В к А.
направлен от
В к А.
Определение
![]() .
Зная
.
Зная
![]() ,
находим:
,
находим:
![]()
![]()
Вектор
![]() направлен от В к С.
направлен от В к С.
Определение
![]() ,
,![]() .
Для определения
.
Для определения
![]() спроецируем
обе части векторного равенства в явном
виде на оси координат x
и у:
спроецируем
обе части векторного равенства в явном
виде на оси координат x
и у:
![]()
![]()
Подставляя
численные значения величин, получаем:
![]() м/с2,
м/с2,
![]()
Знак
“минус” показывает, что вектор
![]() имеет направление, противоположное
предположительно выбранному. Так какVB
0 и
имеет направление, противоположное
предположительно выбранному. Так какVB
0 и
![]()
0, вращение коромысла ВС – замедленное.
Зная
0, вращение коромысла ВС – замедленное.
Зная
![]() и
и![]() ,
находим
,
находим
![]() :
:
![]()
Определение
![]() ,
,
![]() .
По известным
.
По известным
![]() ,
,![]() и
и
![]() рассчитываем:
рассчитываем:
![]() .
.
Направление
![]() определяется направлением
определяется направлением![]() .
Направление
.
Направление![]() определяется
направлением
определяется
направлением![]() ;
;
![]() – истинным
направлением
– истинным
направлением
![]() .
Указываем
.
Указываем
![]() и
и![]() на рис. 2.98.
на рис. 2.98.
Ответ:
![]()
![]()
![]() .
.
Приложения А
Образец оформления титульного Титульный листа
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Орловский государственный технический Университет