

Лабораторна робота дм – 15
Поліспасти і талі
Мета роботи:
Ознайомитись з конструкціями та принципом роботи поліспастів та талей.
Визначити характеристики поліспатів і талей.
Теоретичні відомості
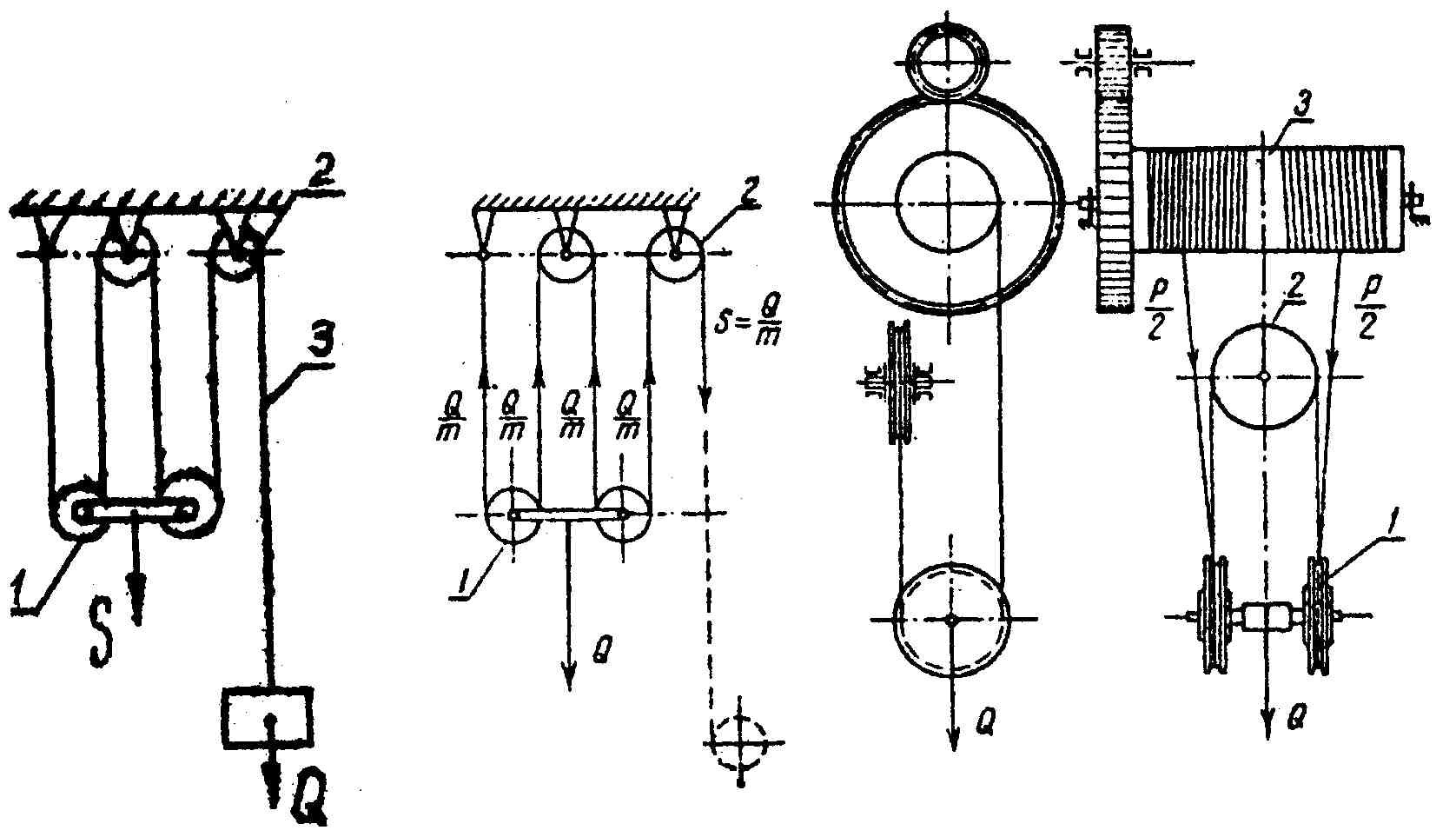
Поліспаст - це пристрій (рис.15-1), який складається з системи блоків (1,2) та гнучкого органа 3 (канат, ланцюг). Блоки вмонтовані у обойми, які бувають рухомими та нерухомими. Інколи поліспаст має тільки рухому обойму. Поліспасти застосовуються для виграшу у силі (рис.15-1, б) або швидкості (рис.15-1,а)
а) б) в)
Рис. 15-1.
Основна
характеристика поліспаста
– кратність
![]() – відношення числа віток канату
– відношення числа віток канату
![]() ,
на яких висить вантаж , до числа віток
канату
,
на яких висить вантаж , до числа віток
канату
![]() до яких прикладене тягове зусилля,
тобто
до яких прикладене тягове зусилля,
тобто
![]() .
.
(15-1)
На
рис.15-1, б зображено поліспаст, у якого
![]() ;
;
![]() ;
;
![]() .
На рис.15-1,а зображено поліспаст, у якого
.
На рис.15-1,а зображено поліспаст, у якого
![]() ;
;
![]() ;
;
![]() .
Розрізняють одинарні
(рис.15-1, а і б) та здвоєні
(рис.15-1,
в) поліспасти. У одинарних поліспастів,
що використовуються для виграшу у силі,
тягове зусилля у
разів менше ваги вантажу, що піднімають,
а швидкість руху тягового канату у
разів більша за швидкість підйому
вантажу. В таких поліспастах
.
Розрізняють одинарні
(рис.15-1, а і б) та здвоєні
(рис.15-1,
в) поліспасти. У одинарних поліспастів,
що використовуються для виграшу у силі,
тягове зусилля у
разів менше ваги вантажу, що піднімають,
а швидкість руху тягового канату у
разів більша за швидкість підйому
вантажу. В таких поліспастах
![]() .
У поліспастах, що використовуються
для виграшу у швидкості, навпаки, тягове
зусилля у
разів
більше ваги вантажу, що піднімають або
переміщують, а швидкість підйому вантажу
у
разів більша швидкості каната, кратність
поліспаста
.
У поліспастах, що використовуються
для виграшу у швидкості, навпаки, тягове
зусилля у
разів
більше ваги вантажу, що піднімають або
переміщують, а швидкість підйому вантажу
у
разів більша швидкості каната, кратність
поліспаста
![]()
Тягове зусилля у канаті з урахуванням втрат дорівнює
![]() ,
,
(15-2)
де
![]() - вага
піднімає мого вантажу;
- вага
піднімає мого вантажу;
![]() - загальний
коефіцієнт корисної дії поліспаста:
- загальний
коефіцієнт корисної дії поліспаста:
 ,
,
(15-3)
тут
- кратність поліспаста,
![]() - к.к.д.
одного блока.
- к.к.д.
одного блока.
К.к.д. одного блока залежить від типу гнучкого органу, діаметра блока та його осі, кута обхвату і типу підшипників. При куті обхвату =180о для блоків з підшипниками ковзання бл=0,95, для блоків з підшипниками кочення бл=0,98.
Якщо тяговий канат збігає з нерухомого блока (рис.15-1,б), то враховується к.к.д. додаткового нерухомого блока 2. В такому разі
 .
.
(15-4)
У
механізмах підйому мостових кранів та
інших машинах часто застосовується
здвоєний поліспаст (рис.15-1, в). У цього
поліспаста вантаж
висить на чотирьох вітках (
),
тягове зусилля прикладене до двох
віток (![]() ),
кратність
),
кратність
![]() .
.
У здвоєного поліспаста вантаж не переміщується у горизонтальному напрямку при намотуванні або змотуванні канату з барабану. Для компенсації нерівномірного витягування канатів у лівій і правій частинах ставлять урівнюючий блок 2 (рис.15-1, в), який під час роботи не обертається, а повертається на невеликий кут в ту чи іншу сторону.
Тягове зусилля у здвоєному поліспасті
![]() .
.
(15-5)
Здвоєні
поліспасти (рис.15-1, в) треба розглядати
як два незалежних одинарних поліспасти
з навантаженням кожен
![]() .
.
Поліспасти застосовуються як автономні пристрої для підйому або переміщення вантажу (найчастіше на монтажних роботах), і так як складові механізми вантажопідйомних машин (в кранах, екскаваторах і ін.).
Талі
і тельфери.
Талями називаються прості вантажопідйомні
механізми, що застосовуються на монтажних
та навантажувально-розвантажувальних
роботах. За типом приводу бувають ручні
з черв’ячною (рис.15-2) або зубчастою
передачами, електричні (рис.15-3.) та
пневматичні. Ручні талі виготовляють
вантажопідйомністю
![]() .
.
З ручних найчастіше використовують талі з черв’ячними передачами.
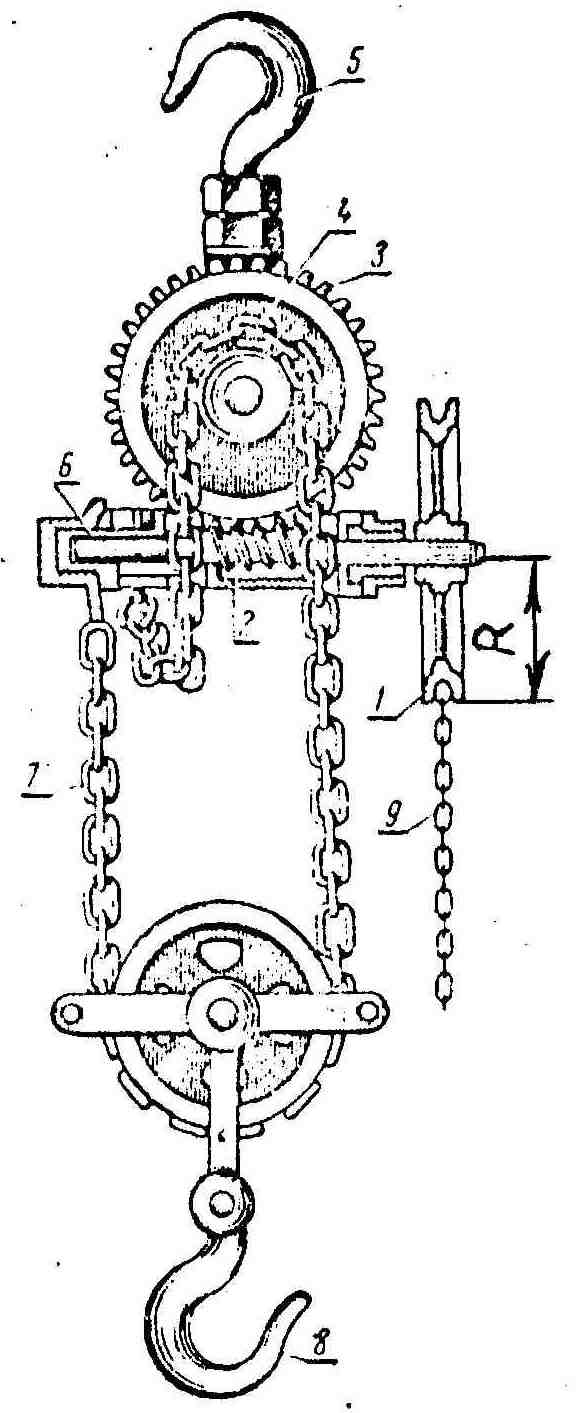
Підйомний механізм черв’ячної талі (рис.15-2) складається із тягового колеса (зірочки) 1, несамогальмуючого черв’яка 2, черв’ячного колеса 3, відлитого заодно з вантажною зірочкою 4, вантажного ланцюга 7, підвіски з вантажним гаком 8. Осьове зусилля черв’яка сприймається шаровою п’ятою 6. Обертання черв’яку передається тяговим ланцюгом 9 за допомогою тягового колеса 1. Підвішують таль за верхній гак 5.
Рис. 15-2.
У
черв’ячних талях к.к.д.
![]() і швидкість підйому вантажу
і швидкість підйому вантажу
![]() .
.
Механізм підйому талі має дискові вантажоупорні гальма 6 (рис.15-2), котрі замикаються осьовим зусиллям черв'яка, яке виникає під дією вантажу.

Рис. 15-3.
Будова дискових гальм наступна: на черв’ячному валу 1 (рис.15-3) насаджені диски 2 і 3, між якими вільно сидить храпове колесо 4. Диск 3 п’ятою упирається у нерухомий корпус черв’ячної передачі 5. На корпусі закріплена собачка 6, яка стопорить храпове колесо при обертанні черв’яка у сторону опускання вантажу. Осьовим зусиллям черв’яка храпове колесо зажате між дисками 2 і 3. Коли вантаж піднімають, то храпове колесо обертається разом з дисками і собачка вільно ковзається по тильній стороні зубців. Після закінчення підйому собачка стопорить колесо і не дає обертатися черв’яку і вільно опускатись вантажу. Для опускання вантажу необхідно вимушено обертати черв’як у зворотну сторону, долаючи тертя на дисках гальмів. Зусилля працюючого на тяговому ланцюзі 9 тягового колеса визначається за формулою:
![]() ,
,
(15-6)
де
![]() -
радіус ведучої (вантажної) зірочки 4
(рис.15-2);
-
радіус ведучої (вантажної) зірочки 4
(рис.15-2);
- кратність поліспаста;
![]() -
передаточне число черв’ячної передачі;
-
передаточне число черв’ячної передачі;
![]() -
радіус тягового колеса;
-
радіус тягового колеса;
![]() -
к.к.д. талі.
-
к.к.д. талі.
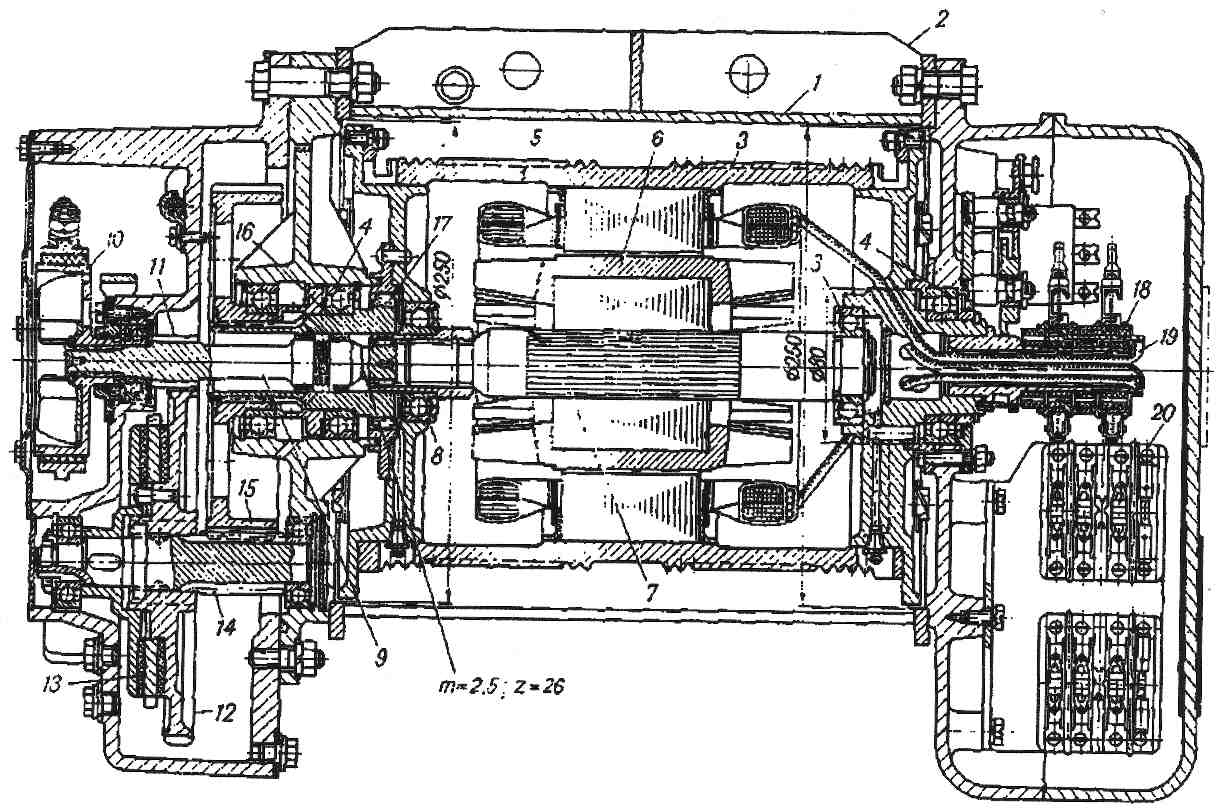
Рис. 15-4. Механізм електротельфера в розрізі.
Тельфери. При значній відстані транспортування вантажу, піднятого за допомогою талі, і при порівняно великій частоті підйомів і опускань вантажу застосовують електричні талі — тельфери (рис.15-4). Тельфери являють собою компактну конструкцію, що може застосовуватися у внутріцеховому і міжцеховому транспорті і складському господарстві як самостійна підйомно-транспортна машина для переміщення вантажу по підвісній двотавровій балці і як механізм підйому і транспортування вантажу в деяких підйомних кранах (кран-балках, баштових і козлових кранах, механізмах замикання щелеп грейфера і т.п.).
На рис. 15-4 показаний механізм тельфера в розрізі. У жорсткому корпусі 1, що має в верхній частині вушка 2 для підвішування тельфера до візка, розташований барабан 3 лебідки, встановлений у бічних кришках корпуса на підшипниках 4. Усередині барабана до його циліндричної стінки прикріплена статорна обмотка 5 електродвигуна підйому вантажу. Ротор 6 електродвигуна закріплений на валу 7, встановленому в днищах барабана 3 на підшипниках 5. Рух з вала 7 через зубчасту муфту передається на вал 9, на лівому кінці якого знаходиться барабан 10 електромагнітного колодкового гальма. При включенні електродвигуна гальма автоматично вимикаються, обертання з вала 9 через шестірню 11 передається зубчастому колесу 12 і далі через дискову фрикційну муфту 13 граничного моменту на вал-шестірню 14 і на зубчасте колесо 15. З колеса 15 обертання передається через пустотілий вал 16 і зубчасту муфту 17 на барабан 3 лебідки тельфера.
Ток до обмоток електродвигуна підводиться через контактні кільця 18 і кабелі 19. Електромагніт гальма має окреме підведення струму. Керування електродвигуном (і гальмом) виконується електромагнітним реверсивним пускачем 20 з кабіни машиніста або з підлоги приміщення натисканням кнопок на пульті керування.
Відповідно до ДСТ 3472—63 електричні талі виготовляють вантажопідйомністю 2,5; 5,0; 10,0; 20,0; 30,0 і 50,0 кН. Талі вантажопідйомністю 2,5кН не мають електричного приводу механізму пересування і пересуваються штовханням вантажу вручну. Для їхнього пересування може використовуватися спеціальний монорельсовий тягач Т-26. Швидкість пересування талів з електродвигуном механізму пересування при керуванні з підлоги досягає приблизно 0,35 м/с, а электроталів при керуванні з кабіни машиніста 1,25 м/с. Швидкість підйому (опускання) вантажу досягає звичайно 0,35 м/с (8 м/хв); висота підйому вантажу досягає 20 м.

Рис. 15-5. Використання електротельфера як самостійної підйомно-транспортної машини
На рис. 15-5 показаний приклад використання тельфера як самостійної підйомно-транспортної машини. До монорейки 1 за допомогою катків 5 (і таких же катків, розташованих у кожухах 7) підвішений тельфер 2 і кабіна 8 машиніста. На барабан тельфера намотаний канат 3 з гаком 4 на кінці. Електродвигун 6 служить для пересування тельферного візка і кабіни по монорейці. Рух від цього електродвигуна передається через редуктор до ведучих катків, розташованих у кожусі 7. У кабіні 8 розміщене сидіння 9 для машиніста і кнопковий пульт керування 10.
Як монорельсовий шлях для підвісного підйомного устаткування (талів, тельферів) застосовують переважно двотаврові балки з перекочуванням катків по нижньому поясі. Монорейки кріпляться до балок перекриття будинку за допомогою підвісок.