

1.4.56. В механизме (рис. 112)
шкив 1 радиуса r = 0,1 м шарнирно
Р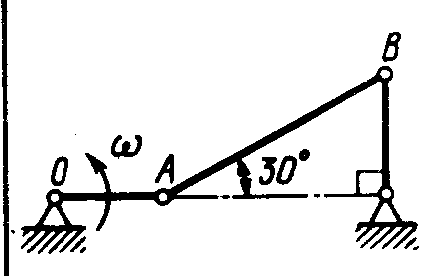 ис.
111 соединен со стержнем 2
длиной 0,25 м с помощью штанги АВ. Для
данного положения механизма определить
угловую скорость штанги, если частота
вращения шкива 1 равна 120 об/мин,
а
ис.
111 соединен со стержнем 2
длиной 0,25 м с помощью штанги АВ. Для
данного положения механизма определить
угловую скорость штанги, если частота
вращения шкива 1 равна 120 об/мин,
а
расстояние 0102 = 0,45м. (2,28).
Рис. 112
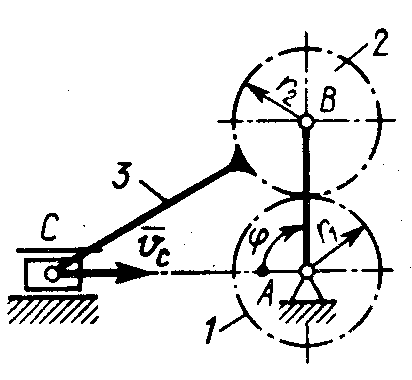
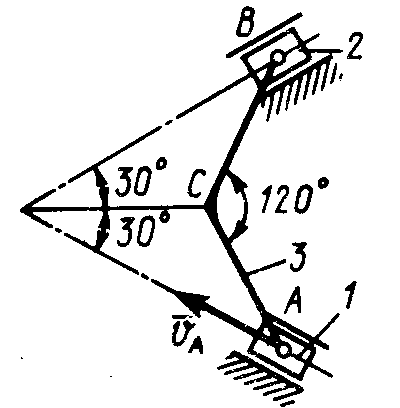
Рис. 113 Рис. 114
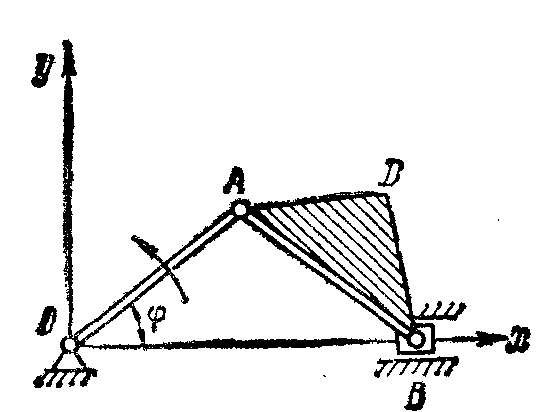
1.4.57. На ось А независимо друг от друга насажены шестерня 1 и кривошип АВ длиной 30 см (рис. 113). На оси В кривошипа установлена шестерня 2 радиуса r1 = 15 см, к которой прикреплен шатун 3. Определить угловую скорость шестерни 1, когда угол φ = 90° и скорость vС точки С ползуна равна 0,3 м/с. (2)
1.4.58. Ползуны 1 и 2, соединенные шарнирами А и В с шатуном 3 (114), движутся по неподвижным направляющим. Определить угловую скорость шатуна в момент, когда скорость точки А равна 0,2 м/с, если длины АС = ДС= 0,2 м. (1,0)
1.4.6. Ускорения точек плоской фигуры
Ускорения двух любых точек плоской фигуры А и В связаны между собой соотношением
![]() ,
(48)
,
(48)
где
![]() - нормальное
(центростремительное)
ускорение
- нормальное
(центростремительное)
ускорение
точки В - направлено от В к А по линии ВА и
![]() ;
(49)
;
(49)
ω - мгновенная угловая скорость плоской фигуры;
![]() -
касательное (вращательное) ускорение
точки В
по отношению к точке А,
оно перпендикулярно ВА
и направлено в сторону вращения
фигуры, если это вращение ускоренное,
и в обратную сторону, если оно
замедленное.
-
касательное (вращательное) ускорение
точки В
по отношению к точке А,
оно перпендикулярно ВА
и направлено в сторону вращения
фигуры, если это вращение ускоренное,
и в обратную сторону, если оно
замедленное.
Модуль этого ускорения определяют по формуле
![]() ,
,
где ε - мгновенное угловое ускорение плоской фигуры. Если известен мгновенный центр ускорений, т. е. точка Q, ускорение которой в данный момент равно нуль-вектору, то ускорение любой точки А находят по формуле
![]() ,
(50)
,
(50)
причем
![]() .
(51)
.
(51)
Если
в некоторый момент известно ускорение
точки А,
а также величины ω
и β,
то для нахождения Q
следует повернуть вектор
![]() в направлении вращения фигуры, если оно
ускоренное (и в обратном - если замедленное),
на острый угол α,
определяемый формулой
в направлении вращения фигуры, если оно
ускоренное (и в обратном - если замедленное),
на острый угол α,
определяемый формулой
![]() .
(52)
.
(52)
На полученной полупрямой следует отложить отрезок
![]() .
(53)
.
(53)
Конец Q этого отрезка и будет мгновенным центром ускорений в данный момент.
Пример 2. Центр колеса, которое катится по наклонной плоскости без скольжения (рис. 115), движется по закону s = 4t2 + 16 (t - в секундах, s - в сантиметрах). Определить ускорение точки касания колеса с плоскостью в момент t = 2с, если радиус колеса R = 16 см.
Решение. Так как центр колеса О движется прямоли-нейно, то его модули скорости и ускорения находят по формулам
![]() .
.
При t = 2с v0 = 16 см/с; a0 = 8 см/с2.
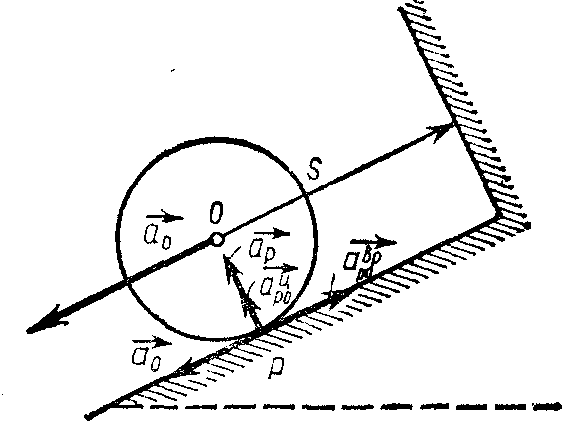
Рис. 115
Ввиду отсутствия скольжения мгновенный центр скоростей находится в точке касания колеса с плоскостью. Следовательно, мгновенную угловую скорость ω получим по формуле
ω = v0 /OP = t /2,
т. е. она представляет собой известную функцию времени. Дифференцируя по времени ω, найдем
![]() .
.
И так, в рассматриваемый момент ω = 1 рад/с, ε = ½ рад/с2.
Определим ускорение точки Р. По формуле (48);
![]() ,
,
где
![]() =
ω2OP
= 16 см/с2,
=
ω2OP
= 16 см/с2,
причем
![]() направлено
от Р
к О,
a
направлено
от Р
к О,
a
![]() =
ε
· OP
= 8 см/с2.
=
ε
· OP
= 8 см/с2.
Так
как колесо вращается ускоренно (ε
и ω
одного знака), то
вращательное
ускорение
![]() направлено
перпендикулярно РО
в сторону вращения фигуры вокруг
полюса О.
направлено
перпендикулярно РО
в сторону вращения фигуры вокруг
полюса О.
В
данном случае
![]() =0,
следовательно,
=0,
следовательно,
![]() ,
ар
= 16 см/с2.
Вектор
,
ар
= 16 см/с2.
Вектор
![]() направлен
к центру колеса О.
направлен
к центру колеса О.
Задачи
 1.4.59.*
- 1.4.66.* С
шатуном АВ
кривошипно-ползунного механизма жестко
связан треугольник ABD
(рис. 116)..
Определить
модули ускорений точек В
и D,
если кривошип ОА
вращается с постоянной угловой скоростью
ω.
Данные взять из таблицы; принять ОА=АВ
= а.
1.4.59.*
- 1.4.66.* С
шатуном АВ
кривошипно-ползунного механизма жестко
связан треугольник ABD
(рис. 116)..
Определить
модули ускорений точек В
и D,
если кривошип ОА
вращается с постоянной угловой скоростью
ω.
Данные взять из таблицы; принять ОА=АВ
= а.
Рис. 116
№ задачи
|
|
BAD, град
|
φ, град
|
1.4.59
|
45
|
45
|
0
|
1.4.60
|
30
|
90
|
30
|
1.4.61
|
45
|
45
|
45
|
1.4.62
|
60
|
90
|
60
|
1.4.63
|
30
|
90
|
0
|
1.4.64
|
60
|
60
|
30
|
1.4.65
|
90
|
45 |
45 |
1.4.66
|
60 |
60
|
60
|
Ответы:
№ задачи |
|
|
|
|
1.4.59 |
|
|
|
|
1.4.60 |
|
|
|
|
1.4.61 |
|
|
|
|
1.4.62 |
|
|
|
|
1.4.63 |
|
|
|
|
1.4.64 |
|
|
|
|
1.4.65 |
|
|
|
|
1.4.66 |
|
|
|
|
1.4.67.*
Диск движется
в своей плоскости так, что его центр О
описывает окружность радиусом R
с постоянной по модулю скоростью
![]() и
вращается вокруг своего центра с
постоянной угловой скоростью ω0.
Найти положение мгновенного центра
ускорений диска.
и
вращается вокруг своего центра с
постоянной угловой скоростью ω0.
Найти положение мгновенного центра
ускорений диска.
Ответ:
Мгновенный центр ускорений Q
находится на прямой, соединяющей центры
окружности и диска, причем![]()
1.4.68.*
В условиях предыдущей задачи центр
диска имеет в данный момент то же значение
скорости
и
обладает касательным ускорением
![]() .
Какое угловое ускорение ε
надо сообщить диску (при прежней угловой
скорости ω0),
чтобы мгновенный центр ускорений Q
находился на прямой, соединяющей центры
окружности и диска? На каком расстоянии
от центра диска О
будет при этом находиться мгновенный
центр ускорений?
.
Какое угловое ускорение ε
надо сообщить диску (при прежней угловой
скорости ω0),
чтобы мгновенный центр ускорений Q
находился на прямой, соединяющей центры
окружности и диска? На каком расстоянии
от центра диска О
будет при этом находиться мгновенный
центр ускорений?
Ответ:
![]() .
При ускоренном движении центра диск
должен вращаться ускоренно в ту же
сторону, в которую движется центр,
или замедленно в обратную сторону. При
замедленном движении центра - все
наоборот. Расстояние
(сравните с ответом предыдущей задачи).
.
При ускоренном движении центра диск
должен вращаться ускоренно в ту же
сторону, в которую движется центр,
или замедленно в обратную сторону. При
замедленном движении центра - все
наоборот. Расстояние
(сравните с ответом предыдущей задачи).
1.4.69.* Колесо радиусом R катится без скольжения по прямолинейному рельсу, имея в данный момент скорость центра (и произвольную величину ускорения центра). Определить модуль нормального ускорения точки на ободе колеса в зависимости от центрального угла ψ между радиусами, проведенными в данную точку и точку касания.
Ответ:
 .
.
1.4.70.*
Колесо
радиусом R
катится без скольжения по неподвижному
рельсу. Зная, что ускорение точки касания
в данный момент равно
![]() ,
определить в этот момент модуль скорости
диаметрально противоположной точки.
,
определить в этот момент модуль скорости
диаметрально противоположной точки.
Ответ:
v
= 2![]() .
.
1.4.71.*
Суммирующий механизм (рис. 117) состоит
из зубчатого колеса радиусом r
и двух
параллельных зубчатых реек, движущихся
в одном направлении с п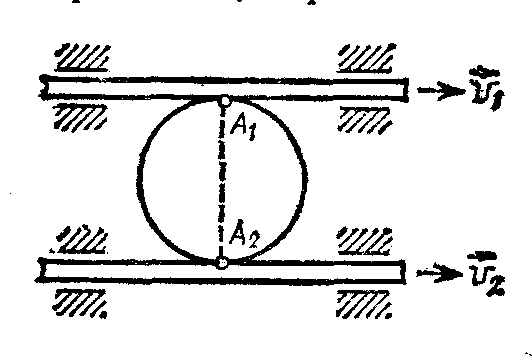 остоянными
скоростями
остоянными
скоростями
![]() и
и
![]() .
Определить модули ускорений точек
A1
и A2
зубчатого колеса, находящихся в местах
зацепления с рейкой.
.
Определить модули ускорений точек
A1
и A2
зубчатого колеса, находящихся в местах
зацепления с рейкой.
Ответ:![]() .
.
Рис. 117
1.4.72.* Решить задачу 1.4.71, считая, что рейки движутся в противоположных направлениях.
Ответ:
![]() .
.
1.4.73.*
Решить задачу
1.4.71, считая, что рейки движутся в одну
сторону, имея в данный момент скорости
и
![]() и ускорения
и ускорения
![]() и
и
![]() соответственно.
соответственно.
Ответ:
 .
.
1.4.74.* Доказать, что центры кривизны траекторий различных точек обода колеса, катящегося без скольжения по прямолинейному рельсу, расположены симметрично этим точкам относительно точки касания колеса с рельсом.
1.4.75. Центр катящегося по плоскости колеса радиуса 0,5 м движется согласно уравнению s = 2t. Определить ускорение точки соприкосновения колеса с плоскостью. (8)
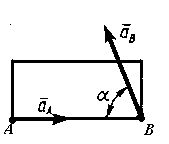
1.4.76. Стержень АВ длиной 2 м находится в плоскопараллельном движении (рис. 118). Найти ускорение точки В, если ускорение точки А равно 1 м/с2, угловая скорость стержня ω =1 рад/с, угловое ускорение ε = 0. (3)
1.4.77. Стержень АВ движется в плоскости (рис. 119). Ускорение точки А в данный момент времени аА = 1 м/с2, угловая скорость ω = 2 рад/с, угловое ускорение ε = 2 рад/с2. Определить ускорение точки В стержня, если длина АВ = 1 м. (5)
1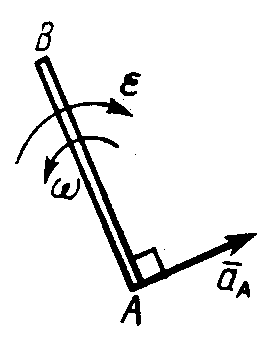
 .4.78.
Тело находится
в плоскопараллельном движении (рис.
120). Найти ускорение точки В,
если ускорение точки А
равно 3 м/с2,
угловая скорость ω
= 1 рад/с, угловое ускорение ε
= О, расстояние
АВ
= 0,5 м. (2,5)
.4.78.
Тело находится
в плоскопараллельном движении (рис.
120). Найти ускорение точки В,
если ускорение точки А
равно 3 м/с2,
угловая скорость ω
= 1 рад/с, угловое ускорение ε
= О, расстояние
АВ
= 0,5 м. (2,5)
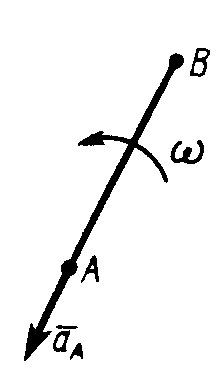
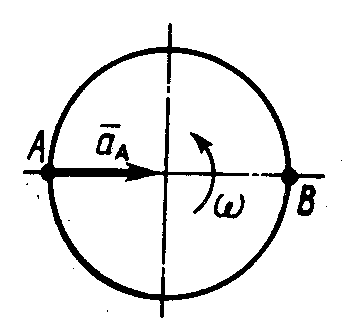
Рис. 118 Рис. 119 Рис. 120 Рис. 121
1.4.79. Колесо катится без скольжения (рис. 121). Определить ускорение точки В колеса в тот момент, когда скорость точки А равна нулю, а ускорение аА =2 м/с2. (2,83)
1 .4.80.
Колесо радиуса r
= 0,1 м катится без скольжения (рис. 122).
Определить ускорение точки В,
если центр колеса А
перемещается с постоянной скоростью
vA
=2 м/с.
(40)
.4.80.
Колесо радиуса r
= 0,1 м катится без скольжения (рис. 122).
Определить ускорение точки В,
если центр колеса А
перемещается с постоянной скоростью
vA
=2 м/с.
(40)
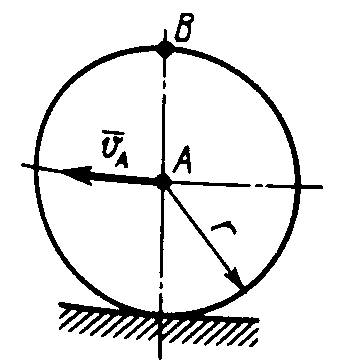
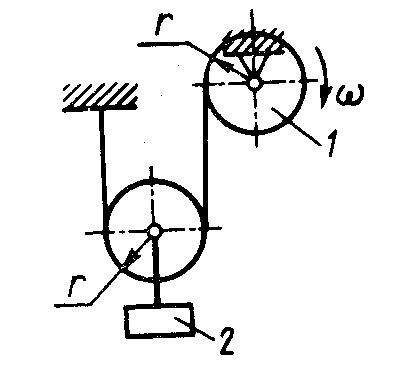
Рис. 122 Рис. 123 Рис. 124
1.4.81. Скорость центра С колеса (рис. 123), катящего- ся бед скольжения, постоянна. Какой угол в градусах с осью Ох составляет вектор ускорения точки являющейся мгновенным центром скоростей колеса? (90)
1.4.82. Барабан 1 (рис. 124) вращается по закону φ = 0,1 t2 . Определить ускорение груза 2, если радиус r = 0,2 м. (0,02)
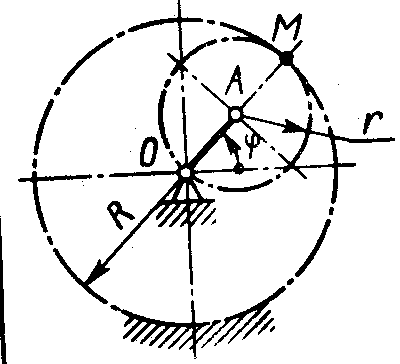
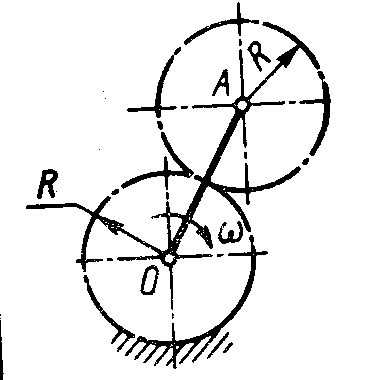
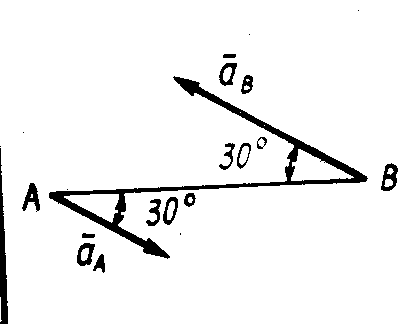
Рис. 125 Рис. 126 Рис. 127
1.4.83. Кривошип ОА (рис. 125) вращается согласно закону ω = 0,5t. Определить ускорение точки М подвижного колеса, если радиус R = 2 r = 0,2 м. (0,05)
1.4.84. Кривошип планетарного механизма (рис.126) вращается с постоянной угловой скоростью ω= 1 рад/с. Определить ускорение точки, являющейся мгновенным центром скоростей подвижного колеса, если радиус R = 0,1 м. (0,2)
1.4.85. Стержень длиной АВ = 40 см движется в плоскости чертежа (рис. 127). В некоторый момент времени точки А и В стержня имеют ускорения аА = 2 м/с2 и аВ = 6 м/с2. Определить угловое ускорение стержня. (10)
1.4.86. Тело находится в плоскопараллельном движении (рис. 128). Найти его угловую скорость, если ускорение точки А равно 1 м/с2, ускорение точки В равно 6 м/с2, расстояние АВ = 1 м, угол α = 60°. (2)
1.4.87.
Квадратная пластина ABDE
движется в плоскости Оху
(рис. 129).
Определить угловое ускорение пластины
в указанном положении, если длина АВ
= 0,5 м, а проекции ускорений точек А
и В на ось Оу
с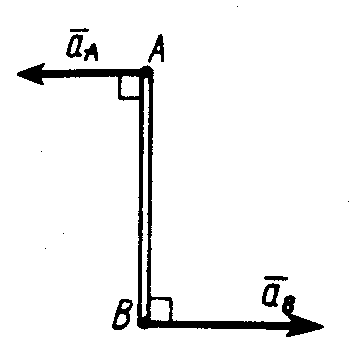
 оответственно
равны аАу
= 3 м/с2,
аВу=6
м/с2.
(4)
оответственно
равны аАу
= 3 м/с2,
аВу=6
м/с2.
(4)
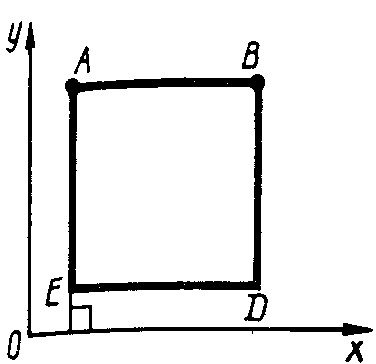
Рис. 128 Рис. 129 Рис. 130
1.4.88. Стержень АВ длиной 50 см движется в плоскости чертежа (рис. 130). В некоторый момент времени точки А и В стержня имеют ускорения аА= 2 м/с2, аВ = 3 м/с2. Определить угловое ускорение стержня. (10)
1.4.89. Кривошип ОА (рис. 131) равномерно вращается с угловой скоростью
ω = 10 рад/с. Определить угловое ускорение шатуна АВ, если в данный момент времени механизм занимает положение, показанное на рисунке. (0)
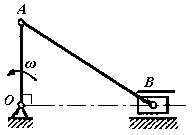
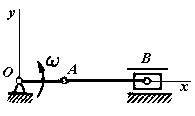
Рис. 131 Рис. 132
1.4.90. Определить ускорение ползуна В кривошипно-ползунного механизма (рис.132) в данном положении, если угловая скорость кривошипа ω = 1 рад/с = const; длины звеньев ОА = 0,3 м; АВ = 0,5 м. (0,225)
1.4.91.
В указанном
на рисунке 133 положении шарнирного
четырехзвенника скорость и ускорение
точки А
кривошипа ОА
равны: vА
= 2 м/с, аА
= 20 м/с2.
Определить ускорение точки В
шатуна АВ,
если длины А В
= ВС =
0,8 м. (25)
В
= ВС =
0,8 м. (25)
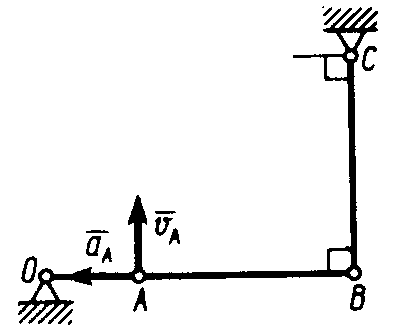
Рис .133 Рис. 134
1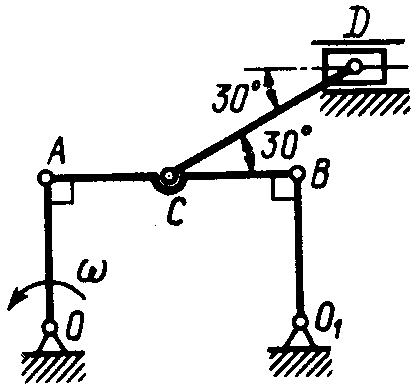 .4.92.
В указанном на рисунке 134 положении
шарнирного четырехзвенника скорость
и ускорение точки А
кривошипа ОА
равны: vA
= 2 м/с, аB
= 40 м/с2.
Определить угловое ускорение звена ВС,
если длины звеньев АВ
= ВС
= 0 5 м. (0)
.4.92.
В указанном на рисунке 134 положении
шарнирного четырехзвенника скорость
и ускорение точки А
кривошипа ОА
равны: vA
= 2 м/с, аB
= 40 м/с2.
Определить угловое ускорение звена ВС,
если длины звеньев АВ
= ВС
= 0 5 м. (0)
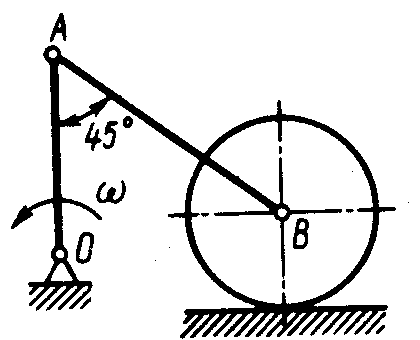
Рис. 135 Рис. 136
1.4.93. Определить угловое ускорение шатуна АВ кривошипно-ползунного механизма в данном положении (рис. 135), если кривошип ОА вращается с постоянной угловой скоростью ω = 10 рад/с, а длины звеньев ОА = 0,3 м, АВ = 0,45 м. (94,3)
1.4.94.
Кривошип ОА
шарнирного параллелограмма ОАВО1
(рис. 136) равномерно вращается с угловой
скоростью ω=
4 рад/с. Определить угловое ускорение
ш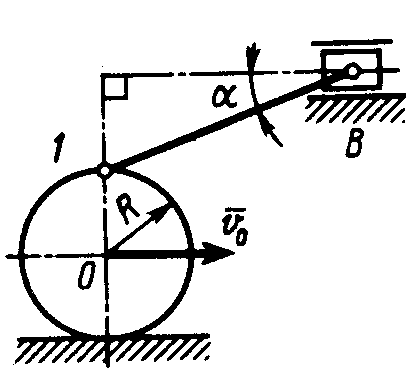 атуна,
CD
в данном положении механизма, если длины
звеньев ОА
= 20 см, СО =30 см. (12,3)
атуна,
CD
в данном положении механизма, если длины
звеньев ОА
= 20 см, СО =30 см. (12,3)
1.4.95. Для данного положения механизма (рис.137) определить ускорение ползуна В, если колесо радиуса R = 50 см катится с постоянной скоростью его центра v0 = 5 м/с;
Рис. 137 угол α = 30°. (28,9)