

2.8.1. Многоконтурные структурные схемы
При определении передаточной функции многоконтурной системы используется принцип вложенности: определяется минимальный вложенный контур и его передаточная функция. А далее переходят к следующему контуру, при этом первый контур заменяется звеном с полученной передаточной функцией.


В
итоге получим схему:

2.8.2. Правила структурных преобразований
1 |
Перенос сумматоров |
|
2 |
Перестановка звеньев |
|
3 |
Перенос узла с выхода сумматора на вход |
|


4 |
Перенос узла с входа сумматора на выход |
|
5 |
Перенос узла с выхода звена на вход |
|
6 |
Перенос узла со входа звена на выход |
|
7 |
Перенос сумматора с выхода звена на вход |
|
8 |
Перенос сумматора со входа звена на выход |
|
9 |
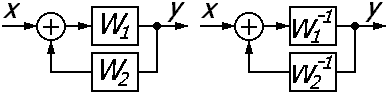
Замена передаточных функций прямой и обратной цепи |
|
10 |
Приведение к единичной обратной связи |
|






2.8.3. Изображение структурных схем в виде графов
Информация о структуре системы и передаточных свойствах ее элементов может быть задана не только в виде обычной алгоритмической схемы, но и в виде сигнального графа.
Сигнальный граф системы управления представляет собой ориентированный граф – совокупность дуг, изображающих отдельные звенья и указывающих направление передачи сигнала, и вершин, соответствующих входным и выходным сигналам звеньев. Отдельному звену алгоритмической схемы, изображаемому прямоугольником, на сигнальном графе системы соответствует стрелка, соединяющая вершины х и у (см. рис. а). Около стрелки указывается передаточная функция звена. Соответствие между изображениями типовых соединений двух элементов на алгоритмических схемах и сигнальных графах показано на рис. б-г. Если к вершине подходят несколько дуг, то соответствующий ей сигнал равен сумме всех выходных сигналов этих дуг. Если из вершины исходят несколько дуг, то входные сигналы всех дуг одинаковы и равны сигналу данной вершины.
Г

3. Устойчивость систем автоматического управления,
Устойчивость автоматической системы – это свойство системы возвращаться в исходное состояние равновесия после прекращения воздействия, выведшего систему из этого состояния. Неустойчивая система не возвращается в исходное состояние, а непрерывно удаляется от него.

Здесь, в рисунке а), А0 – невозмущенное состояние, А2 – возмущенное состояние; на рисунке б) изображено неустойчивое состояние системы, а на рисунке в) – ее нейтральное состояние. По аналогии с состояниями можно ввести понятие возмущенного и невозмущенного движения.
Пусть
дана САУ, которая характеризуется
переменными
![]() .
Движение системы при заданном режиме
определяется xi(t).Это
движение называется невозмущенное.
.
Движение системы при заданном режиме
определяется xi(t).Это
движение называется невозмущенное.
Допустим, что на систему воздействуют внешние силы, которые приводят к отклонению движения от невозмущенного.
![]() ,
,
где xi0(t) – движение, вызванное внешними возмущениями.
Если после снятия внешнего воздействия, спустя некоторое время, система вернется в некоторую область вокруг невозмущенного движения, то данное невозмущенное движение называется устойчивым.
![]()