

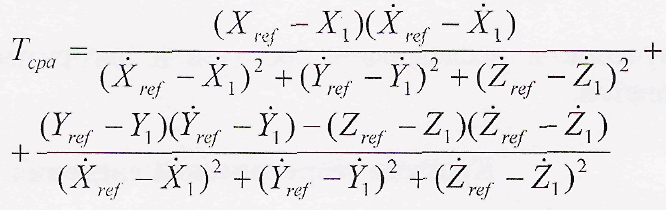
Формула розрахунку в ас кпр часу польоту до моменту, коли відстань між двома літаками буде найменшою.
Вихідними даними для алгоритму є радіолокаційні виміри місця розташування літаків, а також дані про висоту польоту, що надходять від вторинного радіолокатора. Після вторинної обробки цих даних в АС КПР визначаються координати місця розташування літаків X.Y.Z у прямокутній системі координат і складові швидкості польоту X,Y,Z.
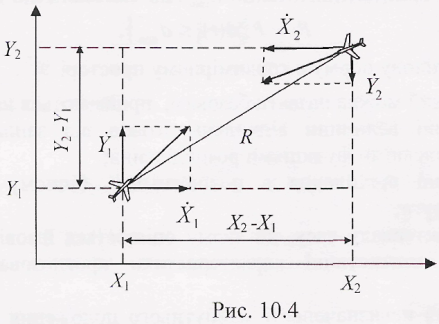
Для кожного літака провадиться перевірка, що полягає в наступному. Спочатку для обраного літака визначається швидкість відносного кута курсу по відношенню до інших літаків (рис. 10.4)
![]()
Тут індекс "1" відповідає літаку, що перевіряється, а індекс "ref" - літаку, відносно якого
провадиться перевірка.
Якщо швидкість зміни кута близька до нуля, то це свідчить про можливість зіткнення літаків. У цьому випадку виконується подальше тестування, що полягає в наступному. Обчислюється час до точки найбільшого зближення літаків
Формула розрахунок в ас кпр відносної висоти двох пс у момент їх розрахункового найбільшого зближення.
Якщо цей час перевищує заданий в системі час, то розглянуте вище тестування повторюється на наступному огляді РЛС. Якщо менше, те тоді провадиться перевірка за висотою відповідно до формули
![]()
де Zmin - різниця висот між літаками в прогнозований момент часу.
Якщо різниця висот більше, ніж встановлене в системі припустиме значення, то ця пара знімається з подальшої перевірки. Якщо різниця висот менше припустимого значення Zmin < Zпр, то провадиться перевірка відстані між літаками в горизонтальній площині відповідно до формули (ця перевірка провадиться також при відсутності інформації про висоту)
![]() де
Rmin
відстань
між літаками в горизонтальній площині
в прогнозований момент часу їхнього
найбільшого
зближення.
де
Rmin
відстань
між літаками в горизонтальній площині
в прогнозований момент часу їхнього
найбільшого
зближення.
Якщо обчислене значення Rmin < R менше встановленого в системі безпечного припустимого значення, то генерується сигналізація, що попереджає диспетчера про небезпечне зближення літаків.
Види конфліктів, що виявляються в АС КПР. Проблема вірогідності.
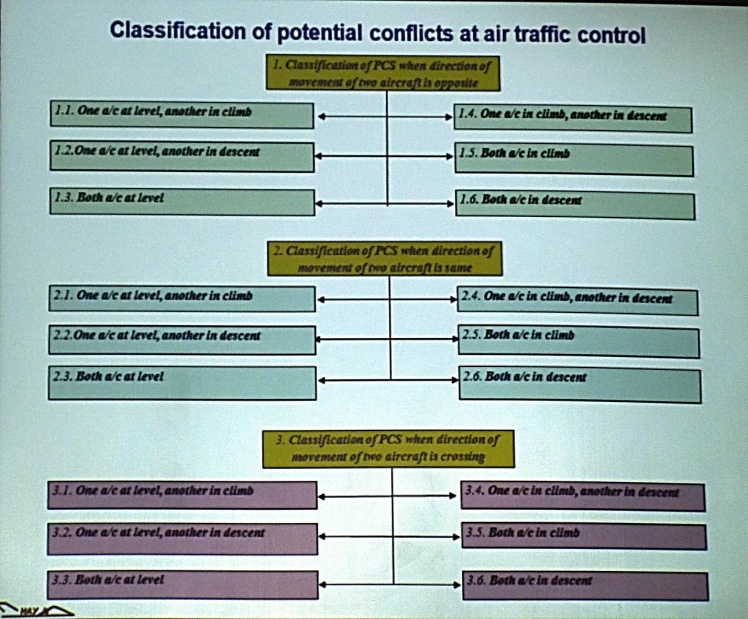
Short
term conflict alert-STCA
Джерела даних, які необхідні для функціонування алгоритму попередження зіткнення ПС в АС КПР.---11
Вихідними даними для алгоритму є радіолокаційні виміри місця розташування літаків, а також дані про висоту польоту, що надходять від вторинного радіолокатора. Після вторинної обробки цих даних в АС КПР визначаються координати місця розташування літаків у прямокутній системі координат і складові швидкості польоту .
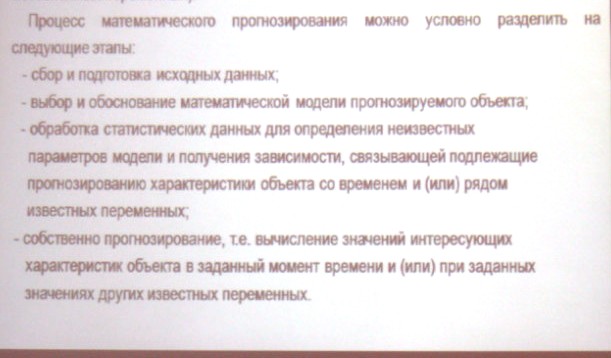
Етапи переносу математичного прогнозування.
Методика побудови геометричної фігури, що описує прогнозовану область невизначеного майбутнього положення ПС за умови, що випадкові фактори мають нормальних закон розподілу.
Недолік точкового прогнозування місцеположення ПС в АС КПР.--38
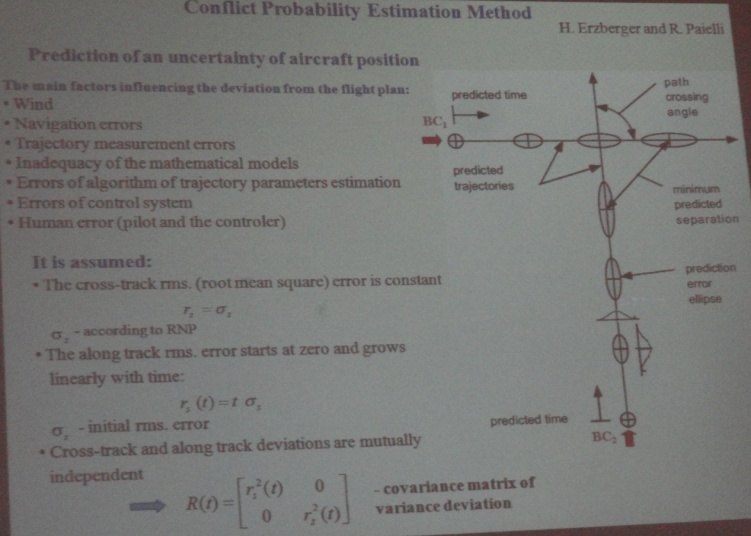
Основні фактори, що впливають на вірогідність прогнозування повідряної обстановки.
- навигационные ошибки
- погрешности траекторных измерений
- неадекватность математических моделей
- погрешности алгоритма оценки траекторных параметров
- ошибки системы управления
- человеческие ошибки (пилота и диспетчера)
Принимается:
Дисперсия отклонения от ЛЗП r постоянна:
Где – требования точности имитации RNP
Дисперсия продольного отклонения квадратично нарастает (t)=
Где – начальная среднеквадратическая ошибка определения положения ВС в продольном движении
Продольное и боковое отклонение взаимно независимы:
Где – ковариационная матрица дисперсий отклонений.