


Введение
Элементную базу цифровых устройств (ЦУ) составляют интегральные схемы (ИС). Со времени их изобретения (США, 1959 г.) ИС постоянно совершенствуются и усложняются. Характеристикой сложности ИС является уровень интеграции, оцениваемый либо числом базовых логических элементов, либо числом транзисторов, которые могут быть реализованы на кристалле.
Различия в уровне интеграции делят ИС на несколько категорий: МИС, СИС, БИС, СБИС (соответственно малые, средние, большие и сверхбольшие ИС). Практическое использование находят все категории.
МИС реализуют простейшие логические преобразования и обладают универсальностью — даже с помощью одного типа логического элемента (например, И-НЕ) можно построить любое ЦУ. В виде СИС выпускаются в готовом виде такие схемы, как малоразрядные регистры, счетчики, дешифраторы, сумматоры и т. п. Номенклатура СИС должна быть более широкой и разнообразной, так как их универсальность снижается. В развитых сериях стандартных ИС насчитываются сотни типов СИС.
С появлением БИС и СБИС схемы с тысячами и даже миллионами логических элементов стали размещаться на одном кристалле. При этом проблема снижения универсальности для ИС с жесткой структурой обострилась бы чрезвычайно пришлось бы производить огромное число типов ИС при снижении объема производства каждого из типов, что непомерно увеличило бы их стоимость, так как высокие затраты на проектирование БИС/СБИС относились бы к небольшому объему их выпуска.
Выход из возникшего противоречия был найден на пути переноса специализации микросхем в область программирования. Появились микропроцессоры и БИС/СБИС с программируемой структурой.
Микропроцессор способен выполнять команды, входящие в его систему команд. Меняя последовательность команд (программу), можно решать различные задачи на одном и том же микропроцессоре. Иначе говоря, в этом случае структура аппаратных средств не связана с характером решаемой задачи. Это обеспечивает микропроцессорам массовое производство с соответствующим снижением стоимости.
В виде БИС/СБИС с программируемой структурой потребителю предлагается кристалл, содержащий множество логических блоков, межсоединения для которых назначает сам системотехник. Промышленность получает возможность производить кристаллы массовым тиражом, не адресуясь к отдельным потребителям. Системотехник сам программирует структуру ИС соответственно своему проекту. Разработан целый спектр методов программирования связей между блоками и элементами кристалла.
Два указанных метода имеют большие различия. Микропроцессоры реализуют последовательную обработку информации, выполняя большое число отдельных действий, соответствующих командам, что может не обеспечить требуемого быстродействия. В БИС/СБИС с программируемой структурой обработка информации происходит без разбиения этого процесса на последовательно выполняемые элементарные действия. Задача решается "целиком", ее характер определяет структуру устройства. Преобразование данных происходит одновременно во многих частях устройства. Сложность устройства зависит от сложности решаемой задачи, чего нет в микропроцессорных системах, где сложность задачи влияет лишь на программу, а не на аппаратные средства ее выполнения.
Таким образом, БИС/СБИС с программируемой структурой могут быстрее решать задачи, сложность которых ограничена уровнем интеграции микросхем, а микропроцессорные средства — задачи неограниченной сложности, но с меньшим быстродействием. Оба направления открывают ценные перспективы дальнейшего улучшения технико-экономических показателей создаваемой на них аппаратуры.
С ростом уровня интеграции ИС в проектировании на их основе все больше усиливается аспект, который можно назвать интерфейсным проектированием. Задачей разработки становится составление блоков из субблоков стандартного вида путем правильного их соединения. Успешное проектирование требует хорошего знания номенклатуры и параметров элементов, узлов и устройств цифровой аппаратуры и привлечения систем автоматизированного проектирования (САПР) для создания сложных систем.
ИС широкого применения изготовляются по схемотехнологиям КМОП, ТТЛШ и др. Элементы КМОП обладают рядом уникальных параметров (малая потребляемая мощность при невысоких частотах переключения, высокая помехоустойчивость, широкие допуски на величину питающих напряжений, высокое быстродействие при небольших емкостных нагрузках) Эти элементы доминируют в схемах внутренних областей БИС/СБИС За ТТЛШ осталась в основном область периферийных схем, где требуется передача сигналов по внешним цепям, испытывающим значительную емкостную нагрузку. Элементы ЭСЛ (эмиттерно-связанная логика) обеспечивают максимальное быстродействие, но ценой повышения потребляемой мощности, что снижает достижимый уровень интеграции.
В дипломном проекте описано устройство, которое способно голосом (вашим или другого человека) сообщать в словесной форме о неполадках в автомобиле и во время стоянки, и при движении. Прибор "опрашивает" датчики, размещенные в наиболее важных узлах машины, и по результатам опроса формирует речевые фрагменты, отражающие состояние контролируемых узлов.
Автомобильные речевые информаторы, предназначенные для звукового оповещения о срабатывании различных датчиков или, иначе говоря, о состоянии систем автомобиля, выпускают уже давно. Однако сравнительно небольшое число контролируемых параметров, привязанность к той или иной определенной модели автомобиля и довольно высокая цена ограничивают широкое распространение этих устройств.
Известны и радиолюбительские разработки таких информаторов. В свое время были попытки применить для синтеза речи дельта-модуляцию. Подобные устройства, хотя и экономят ресурс памяти, но, собранные из дискретных элементов, были очень сложны. Непрост и сам процесс записи звука в ПЗУ. Часто изготовить записывающий узел было труднее, чем воспроизводящий.
В то же время рост объема памяти EPROM (электрическая запись и "ультрафиолетовое" стирание) и их удешевление позволяют реализовать запись речи, не прибегая к сложному кодированию и применению специализированных микросхем. Это, во-первых, облегчает последующее цифро-аналоговое преобразование и, во-вторых, упрощает как программную и аппаратную части, так и сам процесс записи звука в ПЗУ. Требуются лишь микрофон, звуковая карта и простейшая программа, которыми комплектуют операционную систему Windows.
Описываемый здесь речевой информатор может быть смонтирован на автомобилях отечественного и иностранного производства. В нем запрограммировано 22 слова и словосочетания, имеющих самостоятельное смысловое значение.
В основных узлах автомобиля установлены датчики, формирующие при срабатывании аварийные сигналы. Датчики подключены к логическому узлу, соединенному с микропроцессором, который постоянно опрашивает датчики и при опознавании того или иного аварийного сигнала принимает решение на воспроизведение соответствующей предупреждающей фразы.
Анализ технического задания
Согласно техническому заданию требуется разработать автомобильный речевой информатор c использованием ЦАП.
В дипломном проекте необходимо разработать устройство, которое способно голосом сообщать в словесной форме о неполадках в автомобиле во время стоянки и при движении. Прибор должен "опрашивать" датчики, размещенные в наиболее важных узлах машины, и по результатам опроса формировать речевые фрагменты, отражающие состояние контролируемых узлов. Проанализируем какие узлы должны контролироваться в автомобиле и какие параметры будут определять речевую информацию диагностики работы авто, для этого проанализируем литературу по данному вопросу.
С этой целью были изучена следующая научно-техническая литература:
Колодочкин Ты только что-нибудь скажи. — За рулем, 1998
За идейную основу дипломного проекта был взять прибор под названием КОМБАТ и АРО-авто-10.
КОМБАТ умеет произносить следующие фразы – неисправность тормозов, перегрев двигателя, давление масла, ручной тормоз, бензин, задний ход и подсос. Для этого его нужно подсоединить к соответствующим датчикам автомобиля.
Знакомство со схемой и многократное изучение описания вызвали разочарование - неточности и неряшливость здесь на каждом шагу. Датчик указателя уровня и резерва топлива изображен с одним выводом, что может спровоцировать ошибочное подключение КОМБАТа к стрелочному указателю вместо контрольной лампы резерва. Датчик ручного тормоза изображен без промежуточного реле-прерывателя, установленного на части автомобилей. Грамотнее было бы рекомендовать монтаж не к контрольной лампе, а непосредственно к датчику.
Включаем питание - ток потребления в режиме молчания составляет 89 мА. Поочередно дотрагиваемся оставшимися проводами до клемм нужной полярности - из динамика доносится женский голос, и мы слышим упомянутые выше фразы. Ток потребления при этом возрастает до 160 мА.
Качество звучания можно оценить как среднее - некоторые слова не столько слышишь, сколько угадываешь. Во всем чувствуется какая-то неаккуратность - совершенно ненужное "задний ход" произносится с британским акцентом, а обрывистые "бензин" и "подсос" вообще неудобно причислять к словам – так, набор звуков.
В принципе КОМБАТ можно установить практически на любые автомобили с питанием +12В, однако на некоторых из них часть его способностей останется нераскрытой.
Датчик температуры - единственный аналоговый датчик автомобиля, подключаемый к КОМБАТу. Отследить на нем уровень напряжения, соответствующий критической температуре. не так-то просто, учитывая разброс параметров датчика и колебания напряжения бортовой сети. КОМБАТ таким премудростям не обучен, поэтому его сообщения о перегреве двигателя будут столь же точными, как прогнозы синоптиков...
По сравнению с КОМБАтом возможности "АРО-авто-10" гораздо шире. Число проговариваемых фраз достигает нескольких сотен - помимо стандартных аварийных сообщений, устройство умеет выдавать контрольные сведения о запасе топлива, температуре Тосола", сообщать номер оборванного провода, адрес неисправного датчика и др. Кроме того, по желанию заказчика могут воспроизводиться различные экзотические сообщения - от температуры заднего моста до угрозы обращения в ГАИ.
Интересный нюанс - поскольку разброс показаний стандартных датчиков уровня топлива довольно велик, фирма осуществляет персональную настройку блока под автомобиль клиента. Именно такие мелочи говорят об отношении производителя к качеству своей продукции.
Кстати, о качестве. Выше уже отмечалось, что напряжение на датчиках температуры и давления зависит не только от величины измеряемого параметра. но и от напряжения в бортовой сети. Поэтому алгоритм, заложенный в "АРО-авто", предусматривает обработку показаний датчиков с учетом поправки на колебания напряжения питания. Сложно, но правильно.
Проверка изделия в лабораторных условиях сложности не вызвала. Ток потребления составил 9,8 мА при "выключенном зажигании". 165 мА в режиме молчания и 1,1 А в режиме проговаривания фразы. Качество звучания можно оценить как хорошее.
Безусловно, такая "говорилка" - вещь нужная и многофункциональная.
http://ru.wikipedia.org/wiki/
Дельта-модуляция (ДМ) — способ преобразования аналогового сигнала в цифровую форму является дельта-модуляция. Метод дельта-модуляции был изобретён в 1946 г.
Преобразование сигнала при дельта-модуляци
В каждый момент отсчёта сигнал сравнивается с пилообразным напряжением на каждом шаге дискретизации. Если отсчёт сигнала превышает по амплитуде пилообразное напряжение, то последнее нарастает до следующей точки дискретизации, в противном случае оно спадает. В простейшей системе наклон пилообразного напряжения сохраняется неизменным на всём протяжении процесса. Полученный бинарный сигнал можно рассматривать как производную от пилообразного напряжения. Выбирая достаточно малым значение шага Δ, можно получить любую заданную точность представления сигнала.
Фактически, дельта-модуляция представляет собой разновидность другого, более известного, способа преобразования — импульсно-кодовой модуляции (ИКМ), в которой число уровней квантования равно двум. При ДМ по каналу связи передаётся не абсолютное значение сигнала, а разность между исходным аналоговым сигналом и аппроксимирующим напряжением (сигнал ошибки). По сравнению со своими вечными конкурентами, ИКМ и АДИКМ, дельта-модуляция характеризуется меньшей сложностью технической реализации, более высокими помехозащищённостью и гибкостью изменения скорости передачи. В простейшем случае принцип простой дельта-модуляции можно пояснить на осциллограммах.
Преимущество дельта-модуляции по сравнению, например, с ИКМ, которая также генерирует бинарный сигнал, заключается не столько в реализуемой точности при заданной частоте дискретизации, сколько в простоте реализации.
Основной недостаток ДМ состоит в том, что дельта-кодер не успевает отслеживать быстрые изменения уровня сигнала, вследствие чего возникает перегрузка по крутизне. Существует большое число разновидностей ДМ, в которых задействуются различные механизмы устранения этого вида искажений. Большинство из них основаны на использовании мгновенного или инерционного компандирования аналогового сигнала либо адаптивного изменения ступеньки аппроксимирующего напряжения в соответствии с крутизной входного сигнала. На рисунке 1.1 показано в чём суть данного недостатка.
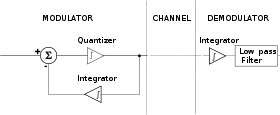
Рисунок 1.1 - Преобразование сигнала при дельта-модуляции
Блок диаграмма Δ-модулятора/демодулятора
Пилообразное напряжение можно восстановить из бинарного сигнала путём интегрирования, а более гладкая аппроксимация достигается последующим пропусканием сигнала через фильтр нижних частот. Скорость передачи цифровых кодов, необходимую для получения заданного качества, можно значительно уменьшить, используя, например, линейное кодирование с предсказанием.
Структурные схемы модема, то есть модулятора и демодулятора, линейной ДМ показаны на илл. Входной аналоговый (речевой) сигнал ограничивается по спектру полосовым фильтром Фвх, имеющим граничные частоты fн и fв. Этот сигнал преобразуется дельта-модулятором в двоичную последовательность импульсов, которая с помощью интегратора, имеющегося в цепи обратной связи, преобразуются обратно в аналоговый сигнал и вычитается из входного сигнала. В результате формируется сигнал ошибки. Последний кодируется одним из двух возможных уровней квантования в зависимости от его полярности. В результате кодирования на выходе квантователя формируется выходная двоичная последовательность импульсов, которыми представляется знак разности между входным сигналом и сигналом обратной связи.
Процесс ДМ является линейным, потому что местный декодер, то есть интегратор, является линейным устройством (под местным декодером далее понимается схема, включенная в цепи обратной связи модулятора. При линейной ДМ это всего лишь интегратор, но в иных случаях могут быть весьма сложные схемы.)При безошибочной передаче, двоичные импульсы восстанавливаются на приёмной стороне и поступают на местный декодер (интегратор) для формирования сигнала, который отличается от исходного на сигнал ошибки в модуляторе. Выходной демодулированый сигнал получается после фильтра нижних частот (ФНЧ), включенного на выходе местного декодера с целью устранения высокочастотных составляющих шума квантования.
Дельта-модулятор функционирует как аналого-цифровой преобразователь, который аппроксимирует аналоговый сигнал x(t) линейной ступенчатой функцией. Для обеспечения хорошей аппроксимации сигнал x(t) должен меняться медленно относительно скорости стробирования. Это требует, чтобы его частота дискретизации была бы в несколько раз (не менее 5) больше частоты Найквиста-Котельникова.
Если в некоторой тактовой точке сигнал ошибки e(t)>0, на выходе дельта-модулятора появится положительный импульс. В результате интегрирования этого импульса аппроксимирующее напряжение у(t) увеличивается на одну положительную ступеньку. Это приращение напряжения у(t) далее вычитается из сигнала x(t), и тем самым изменяется абсолютное значение сигнала ошибки. До тех пор, пока e(t)>0, в последующих тактах будет формироваться непрерывная последовательность положительных импульсов. В конце концов, аппроксимирующее напряжение y(t) окажется больше исходного сигнала x(t), и сигнал ошибки e(t) в этом такте изменит знак. Поэтому на выходе модулятора появится отрицательный импульс, что приведёт к уменьшению аппроксимирующего напряжения у=f(t) на один шаг квантования Δ. Следовательно, дельта-модулятор стремится минимизировать сигнал ошибки.
Модулятор стремится сформировать такую структуру последовательности L(n), чтобы её среднее значение было примерно равно среднему значению крутизны гармонического сигнала за короткий интервал времени. Одиночный импульс последовательности L(n) формирует на выходе интегратора перепад аппроксимирующего напряжения с амплитудой Δ=Vτ вольт. Тогда на интервале длительностью Т среднее значение последовательности L(n) может быть теперь записано как 0.4Δ /Т. Изменение же исходного сигнала x(t) за тот же интервал времени составляет ЗА, что соответствует средней крутизне 0,3Δ/Т, являющейся приближением к среднему значению последовательности L(n).
Если Δ мало, а fд велико, то это приближение улучшается. На интервале времени в 10 тактов между моментами t3 и t4 крутизна сигнала x(t) равна 0.1Δ/T а среднее значение последовательности L(n) равно 0,2Δ/Т. Однако если среднее значение последовательности L(n) вычисляется на интервале между моментами t5 и t6, то оно равно нулю, тогда как средняя крутизна сигнала x(t) свидетельствует о целесообразности минимизации величины Δ при условии, что сохраняется возможность слежения за исходным сигналом x(t).