

4.3. Методы сканирующей зондовой микроскопии
4.3.1. Сканирующая туннельная микроскопия
Исторически первым в семействе зондовых микроскопов появился сканирующий туннельный микроскоп. Принцип работы СТМ основан на явлении туннелирования электронов через узкий потенциальный барьер между металлическим зондом и проводящим образцом во внешнем электрическом поле.
В СТМ зонд подводится к поверхности образца на расстояния в несколько ангстрем. При этом образуется туннельно-прозрачный потенциальный барьер, величина которого определяется, в основном, значениями работы выхода электронов из материала зонда и образца. При качественном рассмотрении барьер можно считать прямоугольным с эффективной высотой, равной средней работе выхода материалов. При приложении к туннельному контакту разности потенциалов V между зондом и образцом появляется туннельный ток. В процессе туннелирования участвуют, в основном, электроны с энергией в окрестности уровня Ферми (рисунок 22).
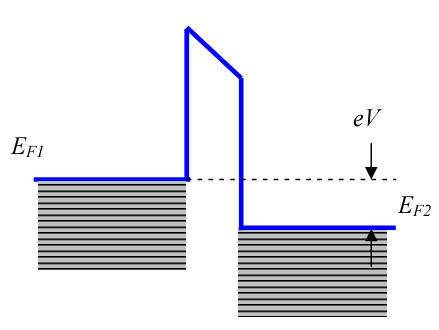
Рисунок 22. Энергетическая диаграмма контакта двух металлов
Экспоненциальная зависимость туннельного тока от расстояния позволяет осуществлять регулирование расстояния между зондом и образцом в туннельном микроскопе с высокой точностью. СТМ представляет собой электромеханическую систему с отрицательной обратной связью. Система обратной связи поддерживает величину туннельного тока между зондом и образцом на заданном уровне, выбираемом оператором.
Контроль величины туннельного тока, а следовательно, и расстояния зонд-поверхность осуществляется посредством перемещения зонда вдоль оси Z с помощью пьезоэлектрического элемента.
Изображение рельефа поверхности в СТМ формируется двумя методами. По методу постоянного туннельного тока (рисунок 23, а) зонд перемещается вдоль поверхности, осуществляя растровое сканирование; при этом изменение напряжения на Z - электроде пьезоэлемента в цепи обратной связи (с большой точностью повторяющее рельеф поверхности образца) записывается в память компьютера в виде функции Z = f (x,y), а затем воспроизводится средствами компьютерной графики.
При исследовании атомарно гладких поверхностей часто более эффективным оказывается получение СТМ изображения поверхности по методу постоянной высоты Z = const. В этом случае зонд перемещается над поверхностью на расстоянии нескольких ангстрем, при этом изменения туннельного тока регистрируются в качестве СТМ изображения поверхности (рисунок 23, б).
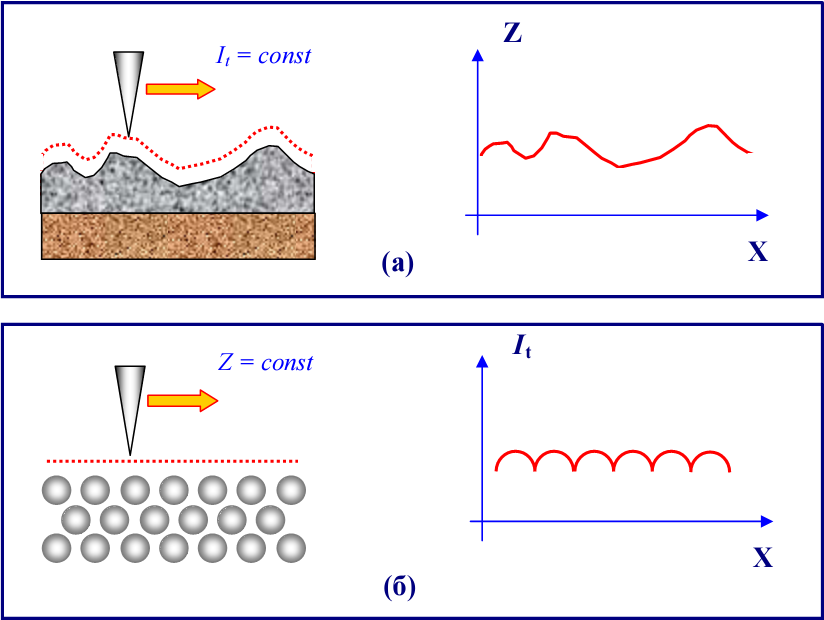
Рисунок 23. Методы СТМ
Сканирование производится либо при отключенной ОС, либо со скоростями, превышающими скорость реакции ОС, так что ОС отрабатывает только плавные изменения рельефа поверхности. В данном способе реализуются очень высокие скорости сканирования и высокая частота получения СТМ изображений, что позволяет вести наблюдение за изменениями, происходящими на поверхности, практически в реальном времени.
Высокое пространственное разрешение СТМ определяется экспоненциальной зависимостью туннельного тока от расстояния до поверхности. Разрешение в направлении по нормали к поверхности достигает долей ангстрема. Латеральное же разрешение зависит от качества зонда и определяется, в основном, не макроскопическим радиусом кривизны кончика острия, а его атомарной структурой.
При правильной подготовке зонда на его кончике с большой вероятностью находится либо одиночный выступающий атом, либо небольшой кластер атомов, который локализует его на размерах, много меньших, чем характерный радиус кривизны острия. Действительно, туннельный ток протекает между поверхностными атомами образца и атомами зонда. Атом, выступающий над поверхностью зонда, находится ближе к поверхности на расстояние, равное величине периода кристаллической решетки.
Поскольку зависимость туннельного тока от расстояния экспоненциальная, то ток в этом случае течет, в основном, между поверхностью образца и выступающим атомом на кончике зонда.
4.3.2. Атомно-силовая микроскопия
В основе работы АСМ лежит силовое взаимодействие между зондом и поверхностью, для регистрации которого используются специальные зондовые датчики, представляющие собой упругую консоль с острым зондом на конце, закрепленную на чипе-основании. Сила, действующая на зонд со стороны поверхности, приводит к изгибу консоли. Регистрируя величину изгиба, можно контролировать силу взаимодействия зонда с поверхностью.
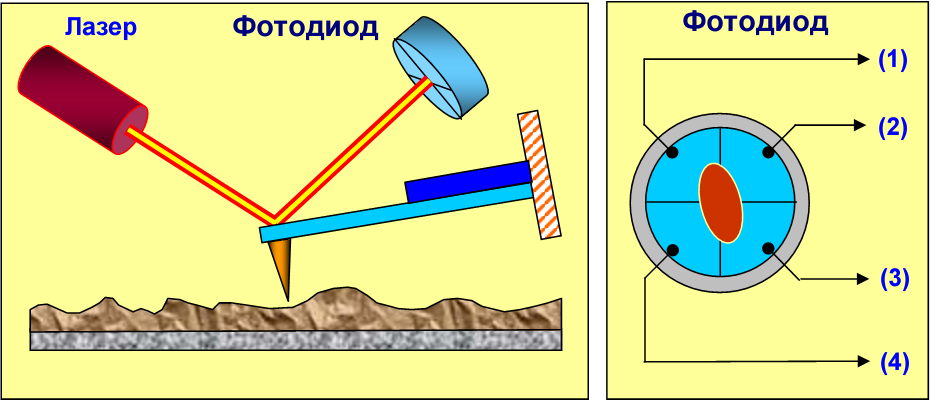
Рисунок 24.Схема оптической регистрации отклонения консоли зондового датчика АСМ.
Получение АСМ изображений рельефа поверхности связано с регистрацией малых изгибов упругой консоли зондового датчика. В атомно-силовой микроскопии для этой цели разработан целый ряд методов, таких как емкостная, интерференционная, тензорезистивная и др. Наиболее широкое распространение получили оптические методы (рисунок 24). Оптическая система АСМ юстируется таким образом, чтобы излучение полупроводникового лазера фокусировалось на консоли зондового датчика, а отраженный пучок попадал в центр фоточувствительной области фотоприемника. В качестве позиционно - чувствительных фотоприемников применяются четырехсекционные полупроводниковые фотодиоды.
При сканировании образца в режиме ΔZ=const зонд перемещается вдоль поверхности, при этом напряжение на Z-электроде сканера записывается в память компьютера в качестве рельефа поверхности Z = f (x,y).
Пространственное разрешение АСМ определяется радиусом закругления зонда и чувствительностью системы, регистрирующей отклонения консоли. В настоящее время реализованы конструкции АСМ, позволяющие получать атомарное разрешение при исследовании поверхности образцов.
Зондирование поверхности в атомно-силовом микроскопе производится с помощью специальных зондовых датчиков, представляющих собой упругую консоль – кантилевер (cantilever) с острым зондом на конце.
Датчики изготавливаются методами фотолитографии и травления из кремниевых пластин. Упругие консоли формируются, в основном, из тонких слоев легированного кремния, SiO2 или Si3 N4 .
Один конец кантилевера жестко закреплен на кремниевом основании - держателе. На другом конце консоли располагается собственно зонд в виде острой иглы. Радиус закругления современных АСМ зондов составляет 1-50 нм в зависимости от типа зондов и технологии их изготовления. Угол при вершине зонда – 10-20º.
Методики, реализуемые на атомно-силовом микроскопе можно разделить на два основных класса – контактные и полуконтактные. Рассмотрим методики, входящие в каждый класс.
Контактные методики:
Метод Постоянной Силы.
В методе постоянной силы острие зонда находится в контакте с поверхностью исследуемого образца. Изгиб консоли, а значит и сила прижима, с помощью цепи обратной связи поддерживается постоянной посредством. Входным сигналом, служащим для восстановления рельефа служит сигнал, подаваемый на Z-составляющую трехкоординатного пьезосканера.
Метод латеральных сил.
При сканировании по методу постоянной силы в направлении, перпендикулярном продольной оси кантилевера, кроме изгиба кантилевера в нормальном направлении возникает дополнительный торсионный изгиб, обусловленный моментом силы, действующей на острие зонда. Угол закручивания при малых отклонениях зонда пропорционален латеральной силе. Величина угла закручивания кантилевера измеряется оптической регистрирующей системой микроскопа, формирующей сигнал LF, изменение которого пропорционально величине торсионного изгиба кантилевера. Данный сигнал используется для получения изображения локальной силы трения по поверхности образца.
Метод постоянной высоты.
В методе постоянной высоты острие зонда находится в контакте с поверхностью. При сканировании закрепленный на чипе конец кантилевера поддерживается на постоянной высоте (сканирование с разомкнутой цепью обратной связи). Таким образом, отклонения кантилевера отражают рельеф поверхности исследуемого образца. Входным сигналом служит сигнал DFL с четырехсекционного фотодиода.
Динамика отслеживания поверхности кантилевером при сканировании ограничена частотными свойствами кантилевера, а не цепи обратной связи, как в случае Метода Постоянной Силы. Резонансные частоты кантилеверов значительно выше характерной частоты цепи обратной связи, которая составляет единицы килогерц. Это дает возможность сканировать с более высокими скоростями.
Отображение сопротивления растекания.
Метод Отображения Сопротивления Растекания является весьма продуктивным АСМ методом, используемым при различных исследованиях, например, при обнаружении дефектов в проводящих и слабо проводящих пленках, характеризации материалов в терминах локального сопротивления и т.д. Отображение Сопротивления Растекания возможно при использовании проводящего зонда, находящегося в контакте с поверхностью образца. К зонду прикладывается напряжение смещения, и проводятся измерения результирующего тока через образец в зависимости от положения зонда одновременно с получением данных о рельефе по Методу Постоянной Силы. При заданном смещении величина измеряемого тока пропорциональна локальному сопротивлению исследуемого образца.
Метод Модуляции Силы.
Метод Модуляции Силы используется для изучения локальной жесткости образца. В процессе сканирования на Z-секцию сканера подается дополнительное модулированное напряжение, совершающее вертикальные периодические колебания сканера. В соответствии с локальной жесткостью поверхности образца изменяются величина продавливания образца и изгиб кантилевера. На жестких участках поверхности величина прогибов поверхности от зонда будет маленькая, а величина изгиба кантилевера большой. На мягких же участках глубина прогибов поверхности увеличится, а величина изгиба кантилевера – уменьшится. Входным сигналом служит сигнал Mag, пропорциональный амплитуде колебания кантилевера.
Контактный метод рассогласования.
В процессе сканирования в соответствии с рельефом поверхности образца изменяется величина изгиба кантилевера. Цепь обратной связи стремится поддержать заданный уровень величины изгиба кантилевера, точнее, уровень сигнала, связанного с изгибом (сигнал DFL). Однако цепь обратной связи не может мгновенно вернуть текущее значение DFL к заданному уровню, поскольку обладает некоторой инерционностью (характеризуемой постоянной времени).
При сканировании текущее значение сигнала DFL (сигнала, связанного с изгибом кантилевера) является сигналом рассогласования цепи обратной связи и содержит дополнительную информацию о рельефе поверхности.
Полуконтактные методики:
Полуконтактный метод.
В полуконтактном методе консоль зондового датчика совершает вынужденные колебания на частоте близкой к резонансной. В процессе проведения измерений острие постукивает по поверхности исследуемого образца. При приближении зондового датчика сила постукивания увеличивается, а амплитуда колебаний уменьшается. Цепь обратной связи поддерживает постоянным сигнал Mag, пропорциональный амплитуде колебаний консоли. Входным сигналом, служащим для восстановления рельефа служит сигнал, подаваемый на Z-составляющую трехкоординатного пьезосканера.
Полуконтактный метод рассогласования.
При работе по Полуконтактному Методу при сканировании в соответствии с рельефом поверхности образца возникает отклонение текущей величины амплитуды колебаний кантилевера. Цепь обратной связи стремится поддержать заданный уровень амплитуды колебаний кантилевера, точнее, уровень сигнала Mag, связанного с амплитудой. Однако цепь обратной связи не может мгновенно вернуть текущее значение Mag к рабочему уровню, поскольку, как уже упоминалось, обладает некоторой инерционностью.
При сканировании текущее значение сигнала Mag является сигналом рассогласования цепи обратной связи и содержит дополнительную информацию о рельефе поверхности. Этот сигнал может быть использован для более точного воспроизведения рельефа.
Метод Отображения Фазы
В процессе сканирования по Полуконтактному Методу, когда колеблющийся кончик зонда касается поверхности образца, он испытывает взаимодействие отталкивающих, адгезионных, капиллярных и других сил. Одновременно регистрируется изменение не только амплитуды колебаний кантилевера, но и сдвиг фазы. Если поверхность образца является неоднородной по своим свойствам, соответствующим будет и фазовый сдвиг. Распределение фазового сдвига по поверхности будет отражать распределение характеристик материала образца.
4.3.3. Магнитно-силовая микроскопия (МСМ)
Магнитно-силовая Микроскопия является эффективным средством исследований магнитных структур на субмикронном уровне. Получаемые с помощью МСМ изображения являются пространственным распределением некоторого параметра, характеризующего магнитное взаимодействие зонд-образец, например, силу взаимодействия, амплитуду или фазу колебаний магнитного зонда. МСМ измерения позволяют проводить исследования магнитных доменных структур с высоким пространственным разрешением, записи и считывания информации в магнитной среде, процессов перемагничивания и т.д.
МСМ реализуется на стандартном атомно-силовом микроскопе при использовании магнитных зондовых датчиков. Магнитные зондовые датчики чаще всего представляют собой стандартные кремниевые зондовые датчики (или зондовые датчики из нитрида кремния), с покрытыми тонкой магнитной пленкой зондами. Наиболее важной задачей является минимизация влияния рельефа на изображение распределения магнитных сил по поверхности образца.
МСМ изображение поверхности образцов, имеющих слабо развитый рельеф поверхности, получают следующим образом. Во время сканирования зондовый датчик перемещается над образцом на некотором расстоянии h=const. При этом величина изгиба кантилевера, регистрируемая оптической системой, записывается в виде МСМ изображения F(x,y), представляющего собой распределение силы магнитного взаимодействия зонда с образцом.
Для МСМ исследований магнитных образцов с сильно развитым рельефом поверхности применяется двухпроходная методика. В каждой строке сканирования производится следующая процедура. На первом проходе снимается АСМ изображение рельефа в контактном или "полуконтактном" режиме. Затем зондовый датчик отводится от поверхности на расстояние dZ , и осуществляется повторное сканирование (рисунок 25).
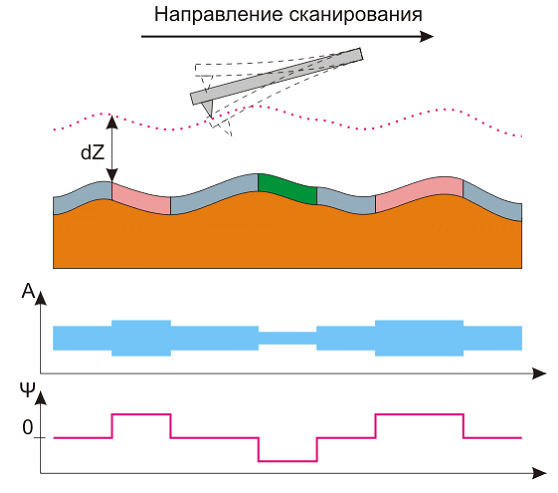
Рисунок 25. Получение информации в МСМ.
На втором проходе датчик перемещается над поверхностью по траектории, повторяющей рельеф образца. Поскольку в этом случае локальное расстояние между зондовым датчиком и поверхностью в каждой точке постоянно, изменения изгиба кантилевера в процессе сканирования связаны с неоднородностью магнитных сил, действующих на зонд со стороны образца. Таким образом, итоговый МСМ кадр представляет собой двумерную функцию F(x,y), характеризующую распределение силы магнитного взаимодействия зонда с образцом.
4.3.4. Электросиловая микроскопия (ЭСМ)
Электросиловая микроскопия является эффективным средством для исследования распределения электрического поля и зарядов по поверхности образца с субмикронным разрешением. Изображения, полученные с помощью этой методики, интерпретируются как пространственное распределение z–составляющей градиента электрического поля по поверхности образца.
В качестве зондовых датчиков используются стандартные проводящие зондовые датчики для полуконтактного метода. Для исключения влияния рельефа поверхности на результаты исследования используется двухпроходная методика.
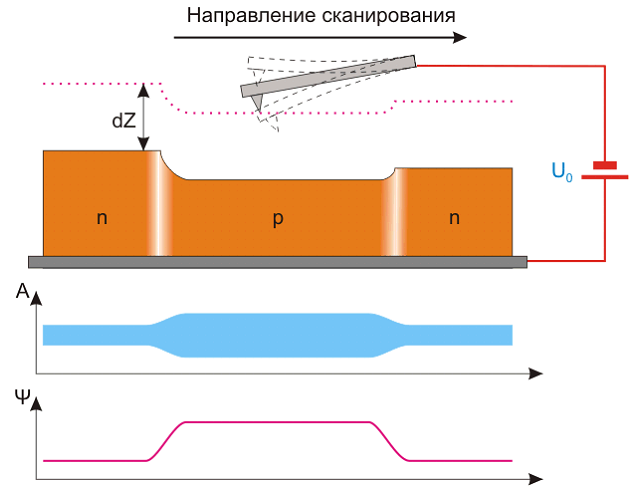
Рисунок 26. Получение информации в ЭСМ
На первом проходе сканируемой строки определяется рельеф поверхности по полуконтактному методу. На втором проходе зонд отводится от поверхности образца на расстояние dZ. С помощью пьезодрайвера зонд приводится в колебательное состояние на резонансной частоте, между зондом и образцом подается постоянное напряжение смещения U0, и осуществляется повторное сканирование. Зондовый датчик движется над поверхностью по траектории, повторяющей рельеф поверхности образца (рисунок 26).
Посредством регистрации изменений амплитуды и фазы колебаний зонда формируется изображение распределения z-составляющей градиента электрического поля по поверхности образца.
Во время второго прохода расстояние между сканируемой поверхностью и зондовым датчиком поддерживается постоянным. В таком случае зонд подвергается воздействию только дальнодействующих сил, основной вклад в которые осуществляется электрическими свойствами образца.