

2.2.Математическая модель гироскопического датчика
Для рассмотрения математической модели гироскопа обратимся к рис.2. Положение ротора относительно подставки (оси ) определяется тремя углами , и , которые получаются при последовательных поворотах гироскопа и отклонении его собственных осей x, y и z от осей неподвижного основания.
Согласно рисунку H – кинетический момент гироскопа; Jx и Jy – моменты инерции ротора гироскопа относительно осей x и y.
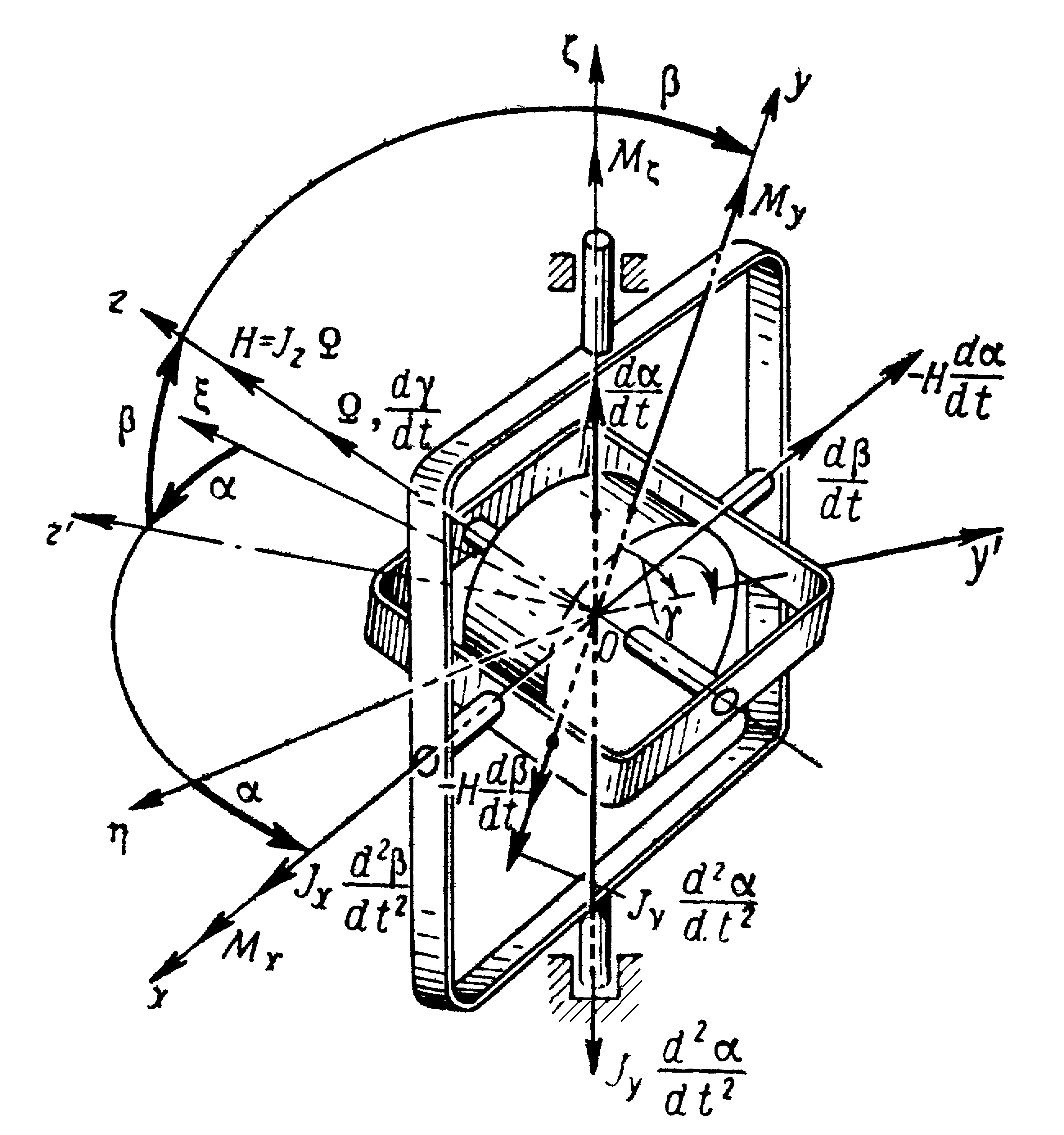
Рис.2. Маховик с тремя степенями свободы – гироскоп
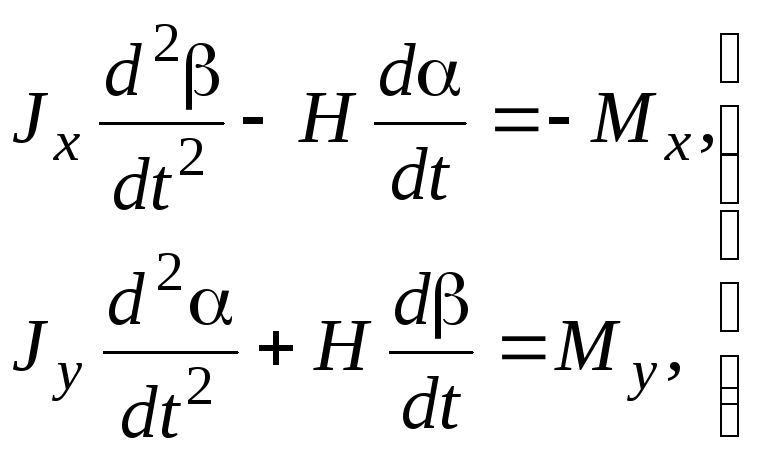
Уравнения движения гироскопа согласно принципу Д’Аламбера имеют вид
 (1)
(1)
где
![]() и
и ![]() – внешние моменты,
действующие вокруг осей x
и y
(моменты от сил сопротивления трения в
осях корданова подвеса, момент от силы
тяжести, моменты, накладываемые на
гироскоп специальными коррекционными
устройствами и т. д.).
– внешние моменты,
действующие вокруг осей x
и y
(моменты от сил сопротивления трения в
осях корданова подвеса, момент от силы
тяжести, моменты, накладываемые на
гироскоп специальными коррекционными
устройствами и т. д.).
Уравнения (1) можно переписать так:
 (2)
(2)
где
![]() и
и![]() -
полное инерционное сопротивление,
развиваемое гироскопом при действии
на него внешних моментов
-
полное инерционное сопротивление,
развиваемое гироскопом при действии
на него внешних моментов![]() и
и![]() .
.
В теоретической механике при изучении законов движения гироскопа различают свободное и вынужденное движение гироскопа; свободное движение гироскопа, называемое нутацией, представляет собой движение по инерции, когда моменты внешних сил не действуют на гироскоп. Движение гироскопа, нагруженного моментом внешних сил, представляет собой совокупность вынужденного и свободного движения. Вынужденное движение гироскопа называется прецессией.
Закон
нутационного движения можно получить,
приняв в уравнениях (2)
![]() =
=![]() =0.
=0.
Тогда
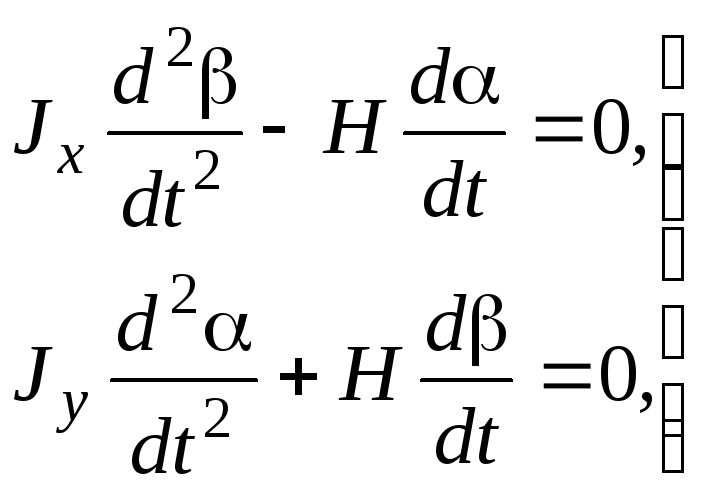 (3)
(3)
Решая систему уравнений (3) получаем дифференциальные уравнения, описывающие нутационное движение гироскопа.
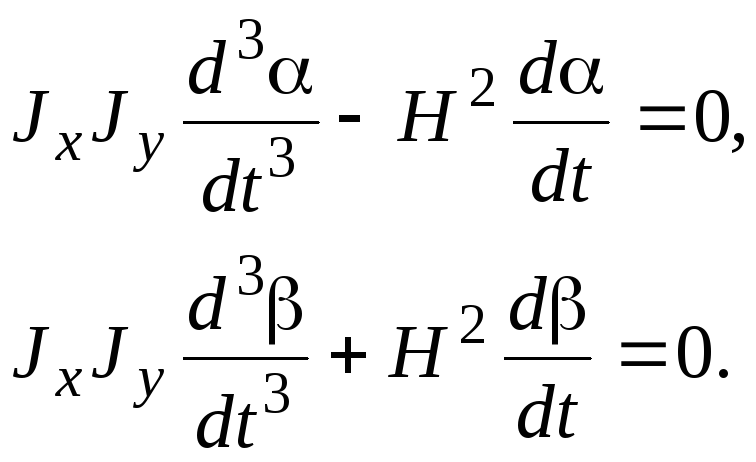 (4)
(4)
Закон
прецессии гироскопа можно получить из
уравнений (2), если пренебречь инерционными
моментами
![]() и
и![]() по сравнению с гироскопическими моментами
по сравнению с гироскопическими моментами![]() и
и![]() .
Тогда имеем
.
Тогда имеем
 (5)
(5)
Наиболее важными бортовыми гироскопическими приборами являются авиагоризонты, указатели поворота, гирополукомпасы, а также выключатели коррекции.
2.3.Авиагоризонты
В настоящее время применяются авиагоризонты типа АГК-47Б, АГБ-2, АГБ-3, АГР-72, АГР-144 и дистанционные авиагоризонты типа АГД-1. Авиагоризонт АГД-1 (рис.3) является наиболее распространенным.
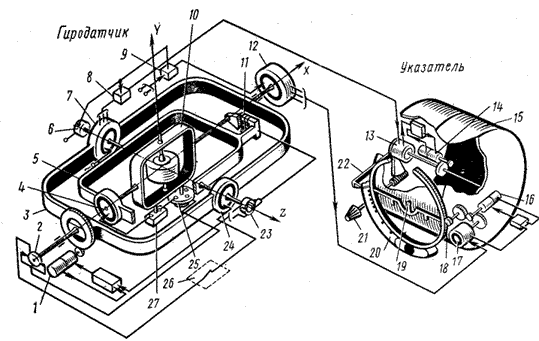
Рис.3. Кинематическая схема авиагоризонта АГД-1: 1, 14, 16-двигатель-генератор; 2, 5, 23-коммутаторы; 3, 5, 10 - рамки; 4, 24 — электродвигатели; 7, 12, 13, 17 — сельсины; 8, 9 — реле; 11 — индуктивный датчик; 15 — катушка; IS — шестерня; 19, 22 — индексы; 20 — шкала; 21 — кремальера; 25 - жидкостной маятниковый переключатель; 26 — контакты выключателя коррекции; 27 — жидкостной выключатель.
Благодаря тому, что система индикации авиагоризонта АГД-1 связана с гироскопом электрически, индикация продольных углов самолета получается естественной: верхняя часть шкалы углов тангажа указателя окрашена в голубой цвет, а нижняя — в коричневый. Пилот видит на авиагоризонте взаимное расположение самолета, земли и неба таким, каким оно является в действительности.
Расположение гироагрегата авиагоризонта АГД-1 вблизи центра масс летательного аппарата обеспечивает хорошую устойчивость и точность гировертикали.
При включении авиагоризонта АГД-1 загорается сигнальная лампа на лицевой стороне прибора, которая должна погаснуть не позже чем через 15 с. Через 1—1,5 мин после включения авиагоризонт должен правильно показывать стояночные углы тангажа и крена самолета.
Следует помнить, что при взлете гировертикаль авиагоризонта АГД-1 накапливает погрешность выдачи сигналов тангажа со скоростью до 1° за кажую минуту взлета. После разворота летательного аппарата на 90° эта погрешность по углу тангажа переходит в погрешность по углу крена.
При разворотах летательного аппарата коррекция авиагоризонта (от маятникового переключателя) отключается по сигналам от выключателя коррекции.
В полете необходимо периодически контролировать правильность работы авиагоризонта по дублирующему авиагоризонту и другим пилотажным приборам. Контроль показаний углов крена ведется по указателю скольжения и указателю поворота (если крен отсутствует, то шарик указателя скольжения находится в центре и стрелка указателя поворота — на нулевом делении шкалы). Правильность показаний углов тангажа контролируется по вариометру, указателю скорости и высоты полета.
При неправильных показаниях авиагоризонта необходимо установить режим прямолинейного горизонтального полета по дублирующим приборам и кратковременно нажать кнопку автоматического арретирования. Арретир устанавливает плоскость следящей рамки параллельно основанию гироагрегата, а главную ось гироскопа нормально к этому основанию.
После окончания процесса арретирования происходит автоматическое арретирование гироскопа. Если через 15 секунд авиагоризонт не будет давать правильных показаний, его следует выключить и дальнейшее пилотирование, производить по дублирующим приборам.
Пользоваться кнопкой арретирования при углах тангажа более ±4° нельзя, так как иначе после арретирования будет выключена продольная коррекция гироскопа.