

2.1.4.План положений скоростей и ускорений
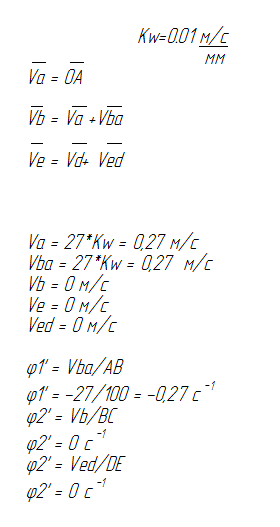
План положения скоростей механизма при q = 0˚
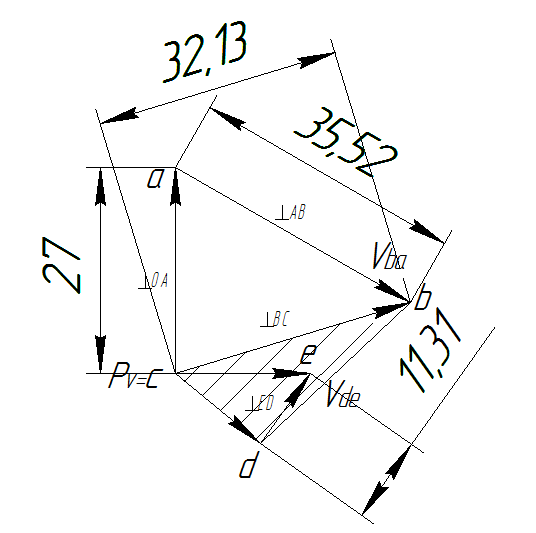
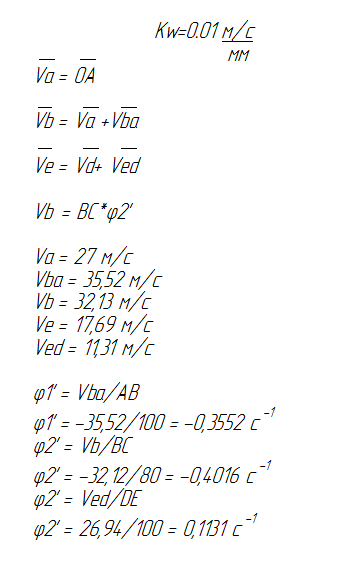
рис. 6. План скоростей
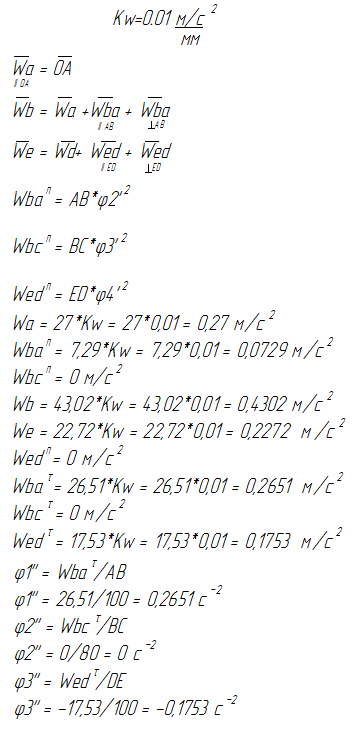
План положения ускорений механизма при q = 0˚

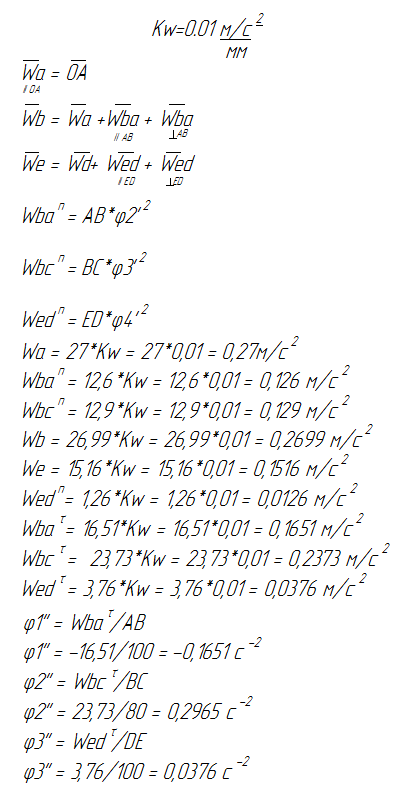
рис. 7. План ускорений
План положения скоростей механизма для крайнего положения при q = 44˚45’
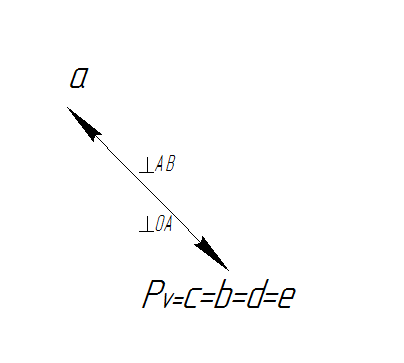
рис. 8. План скоростей для крайнего положения
План положения ускорений механизма для крайнего положения при q = 44˚45’
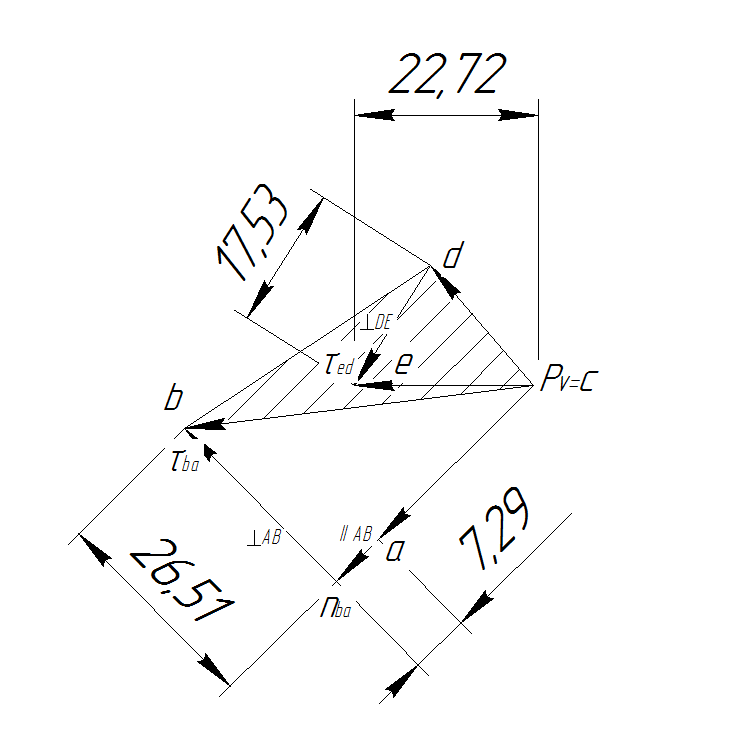
рис. 9. План ускорений для крайнего положения
2.1.5.Таблица сравнений результатов
Параметр |
Графоаналитический метод, м |
MathCad, м |
Xa |
0,27 |
0,27 |
Ya |
0 |
0 |
Xb |
0,7698 |
0,7697 |
Yb |
0,8861 |
0,8861 |
Xc |
1 |
1 |
Yc |
0,1 |
0,1 |
Xd |
1,2298 |
1,2298 |
Yd |
0,3778 |
0,3778 |
Xe |
2,0459 |
2,0459 |
Ye |
-0,2 |
-0,2 |
|
|
|
Xa' |
0 |
0 |
Ya' |
0,27 |
0,27 |
Xb' |
0,3077 |
0,3077 |
Yb' |
0,0925 |
0,0925 |
Xc' |
0 |
0 |
Yc' |
0 |
0 |
Xd' |
0,1116 |
0,1116 |
Yd' |
-0,0923 |
-0,0923 |
Xe' |
0,1769 |
0,1769 |
Ye' |
0 |
0 |
|
|
|
Xa'' |
-0,27 |
-0,27 |
Ya'' |
0 |
0 |
Xb'' |
-0,19 |
-0,19 |
Yb'' |
-0,1918 |
-0,1918 |
Xc'' |
0 |
0 |
Yc'' |
0 |
0 |
Xd'' |
-0,1194 |
-0,1194 |
Yd'' |
0,0223 |
0,0223 |
Xe'' |
-0,1516 |
-0,1516 |
Ye'' |
0 |
0 |
|
|
|
φ1' |
1 |
1 |
φ2' |
-0,3552 |
-0,3552 |
φ3' |
-0,4016 |
-0,4016 |
φ4' |
-0,1131 |
-0,1131 |
|
|
|
φ1'' |
0 |
0 |
φ2'' |
-0,1651 |
-0,1651 |
φ3'' |
0,2965 |
0,2965 |
φ4'' |
-0,0376 |
-0,0376 |
Часть 2 (силовой расчет)
Выходное звено 5 совершает поступательное движение, поэтому рабочая нагрузка задается в виде нагрузочной диаграммы.
При построении зависимости P(φ) учитывается два обстоятельства:
а)
рабочему ходу соответствует больший
угол поворота кривошипа
![]() ,
а холостому ходу – меньший угол поворота
,
а холостому ходу – меньший угол поворота
![]()
б) знак рабочей нагрузки противоположен знаку скорости выходного звена 5.
График зависимости рабочей нагрузки от угла поворота кривошипа:
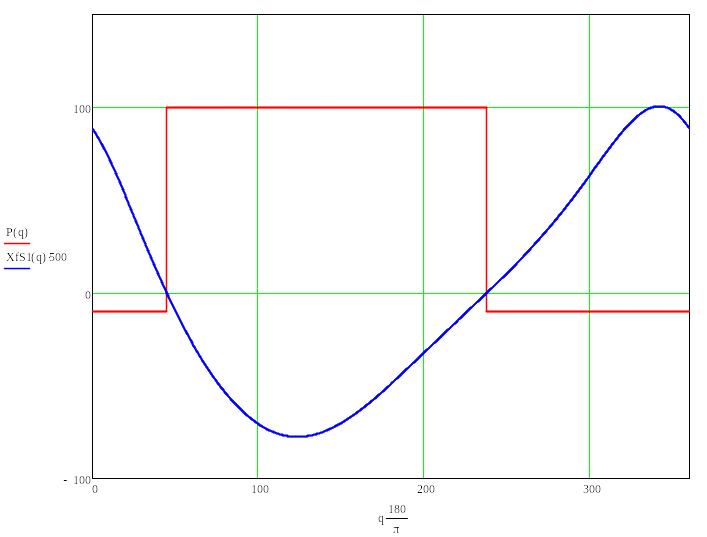
рис. 10. График зависимости рабочей силы от угла поворота кривошипа