

1.2 Двигатели с независимым и с параллельным возбуждением и с постоянными магнитами:
По способу возбуждения двигатели подразделяют на следующие виды:
с независимым возбуждением
с параллельным возбуждением
с последовательным возбуждением
со смешанным возбуждением
В двигателях первого вида обмотки якоря и возбуждения питаются от одного источника
В двигателях второго вида обмотки соединяются параллельно и питаются от одного источника
В двигателях третьего вида обмотки соединяются последовательно и питаются от одного источника
В двигателях четвёртого вида содержатся две обмотки параллельные и последовательные
Особую группу представляют собой двигатели, которые не имеют обмотки возбуждения, магнитное поле в них создаётся постоянными магнитами, которые устанавливаются вместо полюсов.
В станкостроении применяют двигатели 1,2 и 5 видов.
Схема включения в сеть:
Схема ручного (неавтоматического) управления
Q – двухполюсный выключатель.
– двухполюсный выключатель.
FU – плавкие предохранители защищают двигатель от перегрузки.
Rn- пусковой реостат для ограничения пускового тока якоря.
Rя – регулировочный реостат служит для уменьшения частоты вращения якоря.
Ш – зажимы обмотки возбуждения.
Rрв – регулировочный реостат в цепи возбуждения служит для увеличения частоты вращения якоря.
Скоростные и механические характеристики:
Под скоростными характеристиками понимают зависимость n=f (Iя) при постоянном U
Iв =const (Ф=const) Rря=const
Механическая характеристика - зависимость n=φ(М) при тех же условиях.
Эти характеристики являются статическими, т.е. каждую точка характеристики соответствует установившемуся режиму работы двигателей.
По скоростным кинематическим характеристикам оценивают механические свойства двигателей.
Уравнение скоростной
характеристики можно получить из
![]() и
и
![]() :
:
![]()
Если в данное уравнение
вместо Iя
подставим
![]() то получим уравнение механических
характеристики:
то получим уравнение механических
характеристики:
![]()
Каждый двигатель имеет одну естественную скоростную и одну естественную механическую характеристики и бесконечное множество искусственных.
Естественную характеристику
получаем при
![]()
![]() (Ф=Фном)
и
(Ф=Фном)
и
Rря=0 – полностью выведенном регулировочном реостате.
Уравнение естественных характеристик:
![]() - скоростная характеристика (естественная)
- скоростная характеристика (естественная)
 - механическая характеристика
(естественная)
- механическая характеристика
(естественная)
Эти характеристики представляют собой прямые, которые можно построить по двум точкам (номинальному и идеальному холостому ходу)

![]() ;
так как
;
так как
![]() неизвестно, то
неизвестно, то
![]() найдём по формуле:
найдём по формуле:
=![]()
Естественные характеристики рассматриваемого нами двигателя очень жёсткие: при переходе от холостого хода к номинальному режиму частота вращения двигателя изменяется незначительно, и поэтому эти двигатели широко применяются в станкостроении (Металлообработке)
Свойство саморегулирования вращающего момента в соответствии с противодействующим моментом:
Любому двигателю присуще свойство саморегулирования вращающего момента в соответствии с противодействующим моментом на валу. Этим электрические двигатели отличаются от других типов двигателя
Процесс саморегулирования заключается в следующем:
Пусть двигатель работает в режиме, при котором M=M’; n=n’
В какой-то момент времени статический момент на валу двигателя изменили (Мс↑)
Так как Мс больше вращающего момента, то частота вращения якоря начинает постепенно уменьшаться в результате ЭДС якоря так же постоянно уменьшается ( ) это приведёт к увеличению тока якоря, что в свою очередь приведёт к увеличению вращающего момента M( ) и этот переходный процесс идёт до тех пор, пока вращающий момент двигателя не с равняется со статическим моментом и в новом установившемся режиме двигатель будет работать с частотой n’’<n’ при M’’>M’. Это можно показать на статической механической характеристике
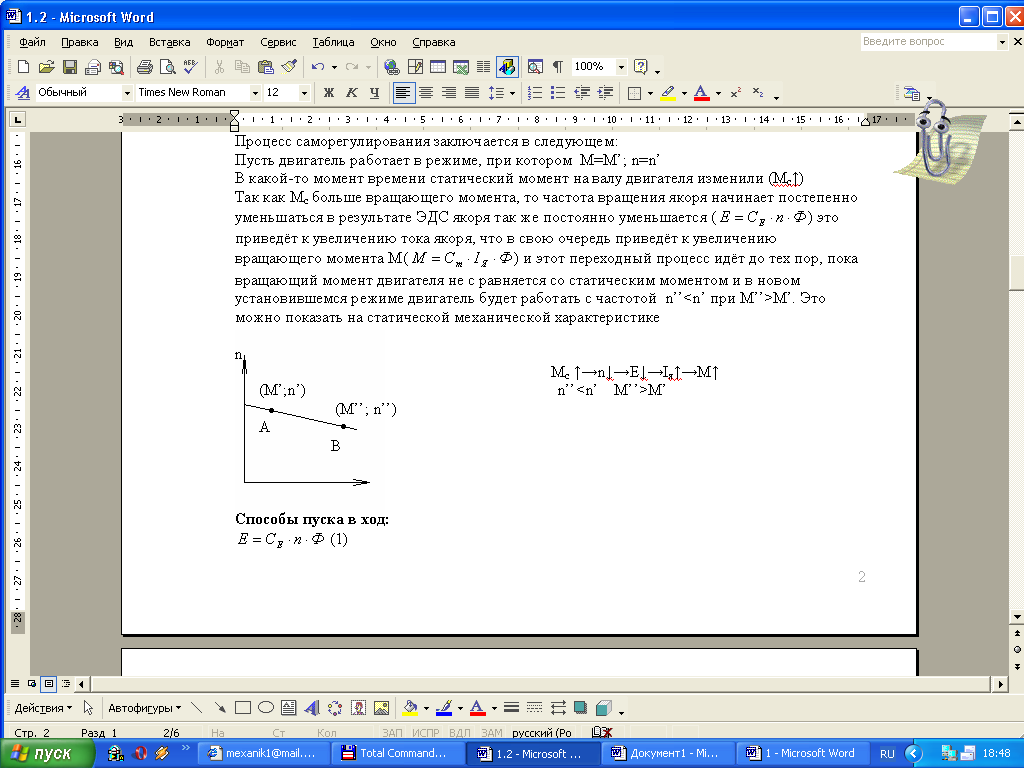
Mc ↑→n↓→E↓→Iя↑→M↑
n’’<n’ M’’>M’
Способы пуска в ход:
(1)
(2)
(3)
![]() (4)
(4)
![]() (5)
(5)
Ток якоря, исходя из (3) определяем
![]()
В начальный момент пуска (в момент включения Q) ток якоря неподвижен E=0, поэтому ток якоря (начальный) пусковой:
![]()
Большой ток для двигателя
опасен (для коллекторно-щёточного
механизма), поэтому ток необходимо
ограничить (1,5 ÷2,5)
![]() в зависимости от тока различными
способами:
в зависимости от тока различными
способами:
резисторный (реостатный)
пуск при пониженном напряжении
При первом способе последовательно с якорем включают пусковой реостат и включают двигатель на номинальное U. Последовательно с якорем включают пусковой реостат сопротивление которого подбирают так чтобы пусковой ток не превышал допустимое значение. Затем якорь подключают к источнику питания и по мере разгона якоря пусковой реостат плавно выводят и в конце пуска оказывается полностью выведенным.
![]()
![]()
Напряжение источника снижают так, чтобы пусковой ток не превысил допустимое значение, затем якорь подключают к этому источнику и по мере разгона якоря напряжение плавно увеличивают вплоть номинального значения.
Реверсирование, регулирование частоты вращения:
Для реверсирования двигателя достаточно изменить направление либо тока якоря, либо направление тока возбуждения. Для этого необходимо провода, присоединённые к обмотке якоря, либо обмотки возбуждения поменять местами. Способы регулирования частоты вращения «видны» из уравнений скоростной и механической характеристик.
1) уменьшение частоты вращения за счёт уменьшения напряжения источника, питающего якорь двигателя. Очевидно, что при изменении напряжения изменяется частота вращения х/х, а наклон характеристик остаётся без изменений.

закон регулирования:
M=const
IВ=const
IЯ= const
Р= Var
2) уменьшение частоты вращения за счёт введения в цепь якоря регулировочного реостата
![]()

При этом способе регулирования частота вращения холостого хода неизменна, а изменяется наклон.
Закон изменения:
M=const;
IВ=const;
IЯ= const;
Р= Var

При 1 и 2 двигатель остановится
3) увеличение частоты
вращения за счёт ослабления магнитного
поля (уменьшение магнитного потока за
счёт уменьшения тока возбуждения). Т.к.
ток якоря зависит от магнитного потока
![]() ,
то чтобы в процессе регулирования не
перегружать двигатель током, устанавливают
следующий закон регулирования: M
= var;
IВ
= var;
,
то чтобы в процессе регулирования не
перегружать двигатель током, устанавливают
следующий закон регулирования: M
= var;
IВ
= var;
IЯ = const; Р= const

1 – Ф” < Ф’
2 – Ф’< Фном
3 – Ф = Фном
Торможение двигателя:
В практике применяют 3 способа электромагнитного торможении двигателя:
генераторное рекуперативное торможение
Уменьшают Uя так чтобы оно стало меньше ЭДС в результате изменяется направление тока якоря, изменяется направление эл магн момента (он становится тормозным) и происходит торможение якоря т.е. плавное уменьшение частоты вращения . Двигатель работает в генераторном режиме преобразуя кинетическую энергию якоря в кинетическую и возвращая её источнику питания. ЭДС сравняется с напряжением (реж х х) и далее машина вновь переходит в двигательный режим. В новом установившемся режиме якорь вращается медленее, чем в предыдущем установившемся режиме.
генераторное динамическое торможение
Обмотку якоря отключают от источника питания и замыкают на тормозной резистор в результате изменяется направление тока якоря ( он определяется только ЭДС и совпадает с ней по направлению). Изменяется направление эл магн момента двиг переходит в генераторный режим и тормозится вплоть до остановки. Изменением сопротивления тормозного резистора можно изменять время торможения.
торможение противовключением (изменяют напряжение и Iя, в результате изменения направления электромагнитного момента и двигатель тормозится, если в момент остановки якоря двигатель не будет отключен, то якорь после это начнёт вращаться в противоположную сторону - реверсирование)
Преобразование энергии в двигателе:
*
![]() *
*![]()
![]() 2
2
![]()
Pв=∆ Pв Ря=Рэл+∆Ря
Pв+ Ря= Р1
Мощность энергии, которая потребляется двигателем от источника питания, складывается из мощности, потребляемой якорем и обмоткой возбуждения. При этом энергия, потребляемая обмоткой возбуждения, целиком и полностью преобразуется в тепловую энергию.
Э нергия,
которая потребляется якорем, частично
преобразуется в тепловую и большей
частью в механическую (электромагнитную).
Процесс преобразования удобно показать
в виде энергетической диаграммы
нергия,
которая потребляется якорем, частично
преобразуется в тепловую и большей
частью в механическую (электромагнитную).
Процесс преобразования удобно показать
в виде энергетической диаграммы
∆Рмх – мощность механических и других неучтённых электрических уравновешенных потерь (трения и другие).
![]() =
η , которая существенно зависит от
степени загруженности двигателя
=
η , которая существенно зависит от
степени загруженности двигателя

Максимальное значение η имеет место при 60 – 80 % загруженности двигателя
! Не следует выбирать двигатели завышенной мощностью.