

11.3. Системы навигации по картам местности
Принцип действия систем навигации по картам местности. При полете над равнинной местностью или на больших высотах целесообразно применять в качестве датчиков ОСС импульсные радиолокаторы. Образуемые при этом ОСС относятся к системам навигации по картам местности, так как ТКМ и ЭКМ являются обычно двумерными.
В простейшей
системе подобного рода ДНА радиолокатора
направляется в сторону земной поверхности
(рис. 11.8,а). Местность характеризуется
специфическим расположением отражающих
электромагнитную энергию объектов в
пределах отражающей площадки ОП (рис.
11.8,б). Мощность отраженного от этих
объектов сигнала
![]() зависит от вида отражающих объектов
(рис. 11.8,в). Для составления текущей карты
местности (рис. 11.8,г) полученный сигнал
квантуется по уровню и дискретизируется
по дальности (по времени). Значение
дискрета зависит от разрешающей
способности радиолокатора по дальности
зависит от вида отражающих объектов
(рис. 11.8,в). Для составления текущей карты
местности (рис. 11.8,г) полученный сигнал
квантуется по уровню и дискретизируется
по дальности (по времени). Значение
дискрета зависит от разрешающей
способности радиолокатора по дальности![]() .
Сформированная ТКМ в данном случае
подобна используемой в системе навигации
по картам местности.
.
Сформированная ТКМ в данном случае
подобна используемой в системе навигации
по картам местности.

Рис. 11.8. Формирование ТКМ в системе навигации по картам местности
Для нахождения пространственного положения ЛА применяют антенную систему, формирующую в общем случае пять лучей (рис. 11.9). Лучи 1–4 служат для получения текущей карты местности, а луч 5 – для измерения высоты полета. Последняя необходима для преобразования наклонной дальности, измеряемой радиолокатором, в горизонтальную дальность, которой соответствует ЭКМ. Избыточное число лучей (пять вместо трех), а следовательно, и избыточное число измерений способствует повышению точности.
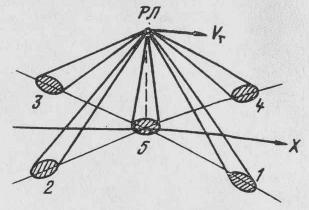
Рис. 11.9. Схема расположения лучей антенной системы радиолокатора
Сигналы по каждому из лучей используются для получения линейного изображения местности. Поэтому корреляционная обработка изображений может выполняться по алгоритмам, аналогичным (11.1) и (11.2).
Основной недостаток системы – неудовлетворительная работа при малых высотах полета, на которых отдельные неровности местности маскируют детали рельефа (область радиолокационной тени), что приводит к снижению контрастности ТКМ. Для восстановления работоспособности системы на малых высотах можно использовать информацию только от луча 5. При этом система превращается в ранее рассмотренную систему навигации по рельефу местности. Существенно, что такой режим работы может быть реализован без перестройки как аппаратуры системы, так и ее программного обеспечения.
Структурная схема системы навигации по картам местности. Полученные от радиолокатора РЛ (рис. 11.10) сигналы поступают в устройство обработки УО, где они подвергаются предварительной фильтрации для выделения высотомерного сигнала, принятого по лучу 5. Этот сигнал направляется в устройство определения высоты УОВ, в котором в результате совместной его обработки с сигналом высоты от инерциальной навигационной системы ИНС вычисляется точное значение высоты полета.

Рис. 11.10. Структурная схема системы навигации по картам местности
Радиолокационные сигналы в АЦП дискретизируются по дальности и квантуются по амплитуде. Возможно как многоуровневое квантование амплитуды (обычно на три-четыре уровня), так и бинарное. Выбор числа уровней квантования определяется требуемой точностью и вычислительными возможностями системы. В преобразователе дальности ПД полученная цифровая ТКМ приводится к горизонтальной дальности, для чего используется значение высоты полета с УОВ. Следующим этапом обработки является цифровое интегрирование в ЦИ, с помощью которого увеличивается значение отношения мощности сигнала к мощности шума. Интегрированию подвергаются несколько последовательно принимаемых отраженных сигналов. В заключение полученное изображение сравнивается с эталонной картой местности ЭКМ в корреляторе Кор, по данным которого в устройстве УОМ определяется пространственное местоположение МЛА.
Контрольные вопросы:
1. В чем суть, достоинства и недостатки обзорно-сравнительных методов навигации?
2. Дайте определение и классификацию обзорно-сравнительным системам.
3. Приведите принцип действия, структурную схему ОСС и раскройте особенности формирования эталонной карты местности.
4. Опишите принцип действия системы навигации по рельефу местности. Как в данном случае формируются карты местности?
5. Зарисуйте и разъясните структурную схему системы навигации по рельефу местности.
6. Как осуществляется корреляционная обработка сигналов ТКМ и ЭКМ?
7. Опишите принцип действия систем навигации по картам местности.
8. Зарисуйте и разъясните структурную схему системы навигации по картам местности.