

4.2 Оптимизация движения кабины пассажирского лифта
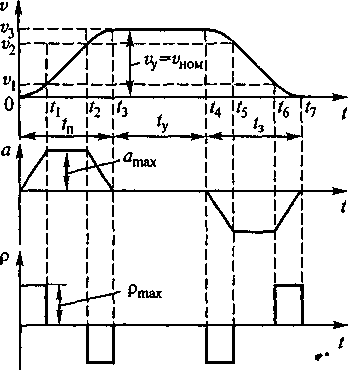 Рис.4.2.
Оптимальная диаграмма движения кабины
Рис.4.2.
Оптимальная диаграмма движения кабины
Оптимальную диаграмму движения кабины лифта (рис.4.2). В интервалах пуска и замедления рывок скорости изменяется скачкообразно на участках. Ускорение, а изменяется по трапецеидальному закону на участках и Скорость имеет параболические участки при изменении ускорения движения.
Рассмотренная диаграмма является оптимальной, если переходные процессы удается осуществить за минимально возможное время, так как на всех стадиях переходного процесса там, где это, возможно, поддерживаются постоянными предельно допустимые значения рывков и ускорений. Однако на практике в точности реализовать такой график движения трудно. При проектировании электропривода подъемных устройств важной задачей является их точная остановка против заданного уровня. Неточная остановка пассажирских подъемников увеличивает время входа и выхода пассажиров, грузовых — затрудняет, а в некоторых случаях делает невозможной разгрузку кабины.
Если при ручном управлении лифтом и шахтными подъемниками кабина при торможении по тем или иным причинам не остановилась против заданного уровня, то ее доводка может быть произведена оператором путем повторного включения двигателя. В этом случае непосредственно к системе электропривода каких-либо специальных требований в отношении точной остановки не предъявляется. При автоматизации подъемной установки управление всеми элементами рабочего процесса и, в частности, процессом остановки полностью осуществляет электропривод. В связи с этим к нему предъявляются жесткие требования в отношении точной остановки, которые в ряде случаев оказывают решающее влияние на выбор той или иной системы электропривода.
Рассмотрим схему остановки кабины лифта. При подходе кабины лифта к этажной площадке установленный на ней упор. В воздействует на датчик точной остановки А, который может быть выполнен в различных конструктивных вариантах. После срабатывания датчика кабина продолжает следовать с постоянной скоростью Vн, пока не сработают аппараты, дающие импульс на отключение двигателя и наложение механического тормоза. Путь, пройденный кабиной при этой скорости:
![]() (4.1)
(4.1)
Далее начинается торможение кабины, за время которого она проходит путь S". Следовательно.
![]() (4.2)
(4.2)
где FT; FC — соответственно тормозное и статическое усилия, приведенные к скорости движения кабины, Н; т — приведенная к скорости движения кабины масса всех движущихся частей подъемника, кг. Отсюда
 (4.3)
(4.3)
Путь, пройденный кабиной с момента воздействия на датчик точной остановки до полной остановки:
![]() (4.4)
(4.4)
где Fдип - суммарное усилие, Fдип = Fc + FT.
Неточность остановки возникает вследствие того, что в процессе работы все величины, от которых зависит S", изменяются в широких пределах. Масса m и статическое усилие Fс зависят от загрузки кабины. Значение скорости VH определяется жесткостью механической характеристики электропривода и значениями усилия Fс. Наконец, время и усилие тормоза FT могут меняться в зависимости от случайных факторов. Каждая из указанных величин может изменяться в пределах х = х0± Ах, где х0 — среднее значение, а Ах — наибольшее возможное отклонение переменной х от среднего значения:
Следует, что наиболее эффективным способом снижения неточности остановки является уменьшение средней начальной скорости, с которой кабина подходит к датчику; точной остановки. Для получения заданной точности остановки при больших рабочих скоростях подъемников необходимо перед остановкой заблаговременно снизить скорость до значения Vдоп при котором неточность остановки ΔSmах не превышает допустимую.
Таким образом, требование точной остановки определяет диапазон регулирования скорости, который должен обеспечивать: электропривод автоматизированного подъемника при заданно допустимой неточности SДОП .