

В качестве регулятора выступает интегро-дифференцирующее звено с передаточной функцией:
WРЕГ= (0,142р+1)(0,341р+1)/(0,19р)(0,221р+1).
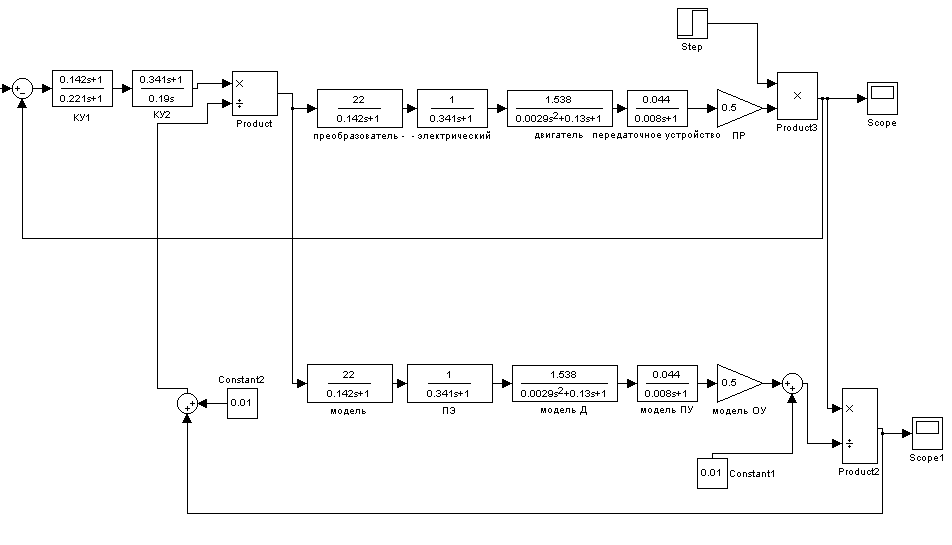
Рисунок 7 – структурная схема адаптивной системы управления с коррекцией по изменению коэффициента передачи процесса резания
7. Моделирование АдСу на эвм
Переходный процесс САУ без возмущения с корректирующим устройством:

Рисунок 8 – Переходный процесс САУ без возмущения с КУ
tПП=3 c, величина перерегулирования = 0%.
Переходный процесс САУ с возмущением, с КУ:

Рисунок 9 – переходный процесс САУ с возмущением (на 5 секунде) и с корректирующим устройством
Время переходного процессаtПП=3 c, величина перерегулирования = 0%.
 Переходный
процесс АдСУ с возмущением, с подключенным
контуром адаптации:
Переходный
процесс АдСУ с возмущением, с подключенным
контуром адаптации:
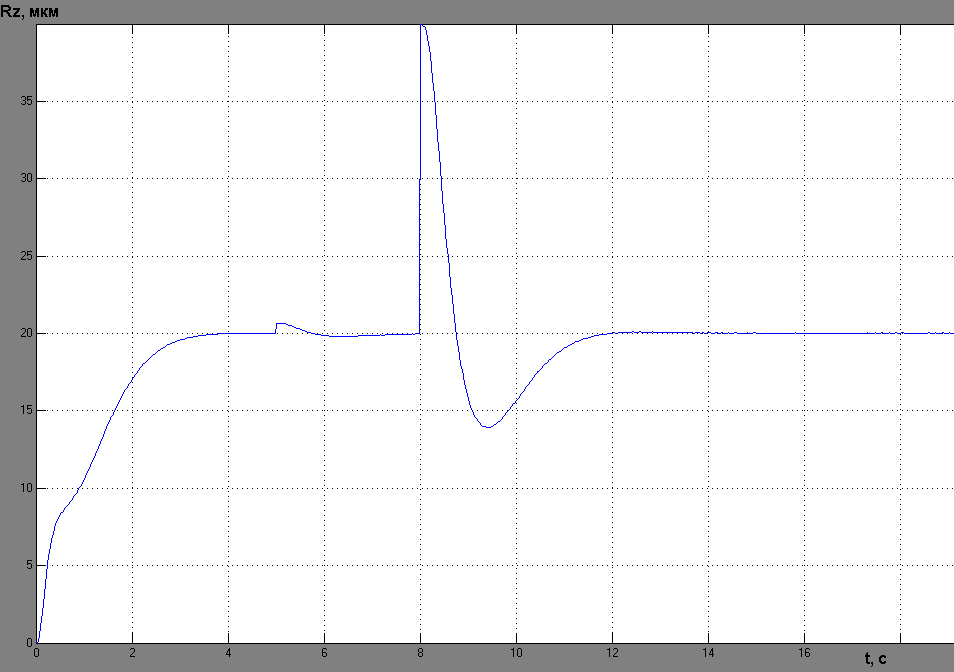
Рисунок 10 – переходный процесс АдСУ с возмущением (на 5 секунде), с подключенным контуром адаптации.
 Переходный
процесс АдСУ с возмущением, с отключенным
контуром адаптации:
Переходный
процесс АдСУ с возмущением, с отключенным
контуром адаптации: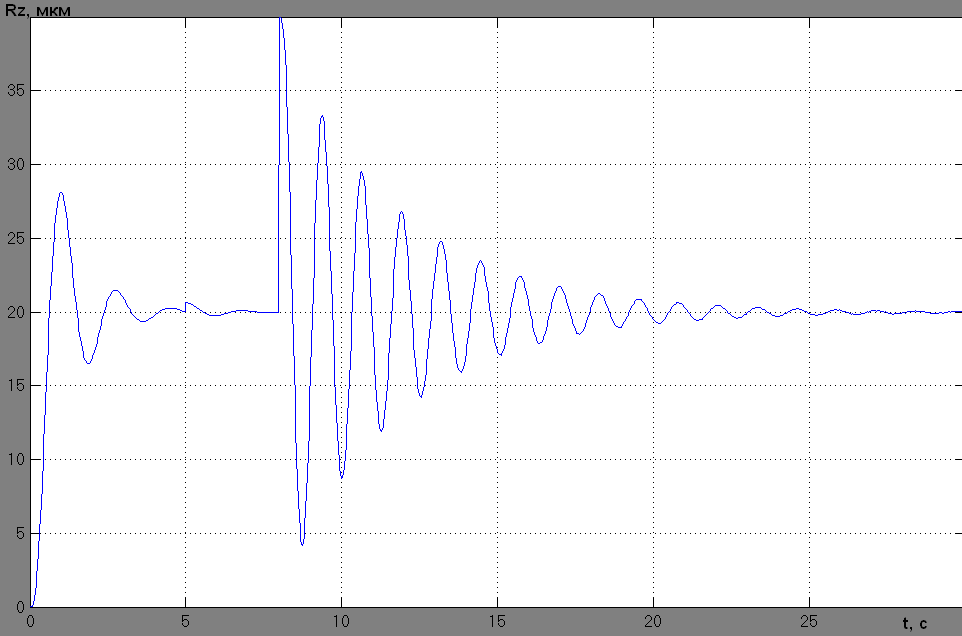
Рисунок 11 – переходный процесс АдСУ с возмущением (на 5 секунде), с отключенным контуром адаптации.
8. Выводы о качестве работы АдСу по результатам моделирования
Система не теряет устойчивости, даже при изменении коэффициента процесса резания во много раз. При подключенном контуре адаптации система не теряет устойчивости.
Переходный процесс имеет следующие показатели:
время переходного процесса tПП=3 секунды.
перерегулирование = 37%
Система быстро отрабатывает скачкообразные возмущения (t=4с).
Из графиков переходных процессов видно (рис. 10, 11), что при отключенном контуре адаптации при скачкообразном изменении коэффициента резания система приобретает колебательный характер. При включенном контуре адаптации уменьшается перерегулирование и значительно сокращается время стабилизации.
При введении синусоидального возмущения (=0,2, А=2) изменение переходного процесса на графике практически не заметно. Таким образом, плавно изменяющиеся возмущения практически не влияют на устойчивость системы.
Заключение
В ходе выполнения курсовой работы была синтезирована адаптивная система управления шероховатостью Rz в зоне резания по изменению коэффициента передачи процесса резания, были получены практические навыки в анализе и составлении математических моделей объектов управления (процесс резания). Приобретен опыт моделирования и анализа АдСУ с помощью пакета прикладных программ Matlab.
Была синтезирована простейшая система адаптивного управления, которая, тем не менее, полностью удовлетворяет поставленным задачам. Полученная система устойчива и отрабатывает любые теоретически сколь угодно большие изменения коэффициента резания. Все элементы контура адаптации физически реализуемы.