

17. Абсолютная и относительная погрешности вычитания.
Погрешность разности: предельная абсолютная погрешность разности (u = x1 - x2) равна сумме предельных абсолютных погрешностей уменьшаемого и вычитаемого: Du = Dx1 + Dx2
Отсюда предельная относительная погрешность разности
где А - точное значение абсолютной величины разности чисел х1 и х2 .
Если приближенные числа х1 и х2 достаточно близки друг к другу и имеют малые абсолютные погрешности, то число А - мало. В этом случае из этой же формулы следует, что предельная относительная погрешность может быть весьма большой, т.е. происходит потеря точности.
Пример. Найти разность двух чисел х1 = 47.132 и х2 = 47.111 .
Решение. Разность u = 47.132 - 47.111 = 0.021 . Предельная абсолютная погрешность разности равна Du = 0.0005+0.0005=0.001 .
Предельные абсолютные погрешности вычитаемого, уменьшаемого и разности равны:
dx1 = 0.0005/47.132 = 0.00001
dx2 = 0.0005/47.111 = 0.00001
du = 0.001/0.021 = 0.05
Поэтому при приближенных вычислениях полезно преобразовывать выражения, вычисления числовых значений которых приводит к вычитанию близких чисел.
18. Метод сплайнов интерполяции данных: тип метода, количество и степень сплайн-полиномов, условие интерполяции и условия сопряженности сплайнов, эффективность метода.
В переводе с английского «spline» означает линейка. Если на плоскости отобразить некоторую функцию y = f(x) точками с коорди-натами (xi, yi), i = 0, 1, …, n, затем в этих точках зафиксировать стержни перпендикулярно плоскости, как это показано на рис. 2.1, и вставить между ними гибкую и упругую (стальную) линейку, то она примет форму, при которой запасëнная в ней упругая энергия будет минимальна.
Из теории изгиба бруса известно, что при малых деформациях геометрическая форма линейки (сплайна) будет представлять кривую, описываемую на каждом отрезке между точками (xi, yi), сопряжëн-ными кубическими полиномами.
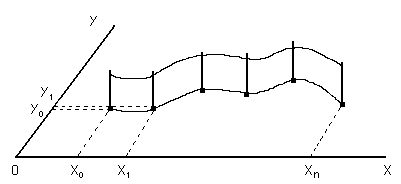
Рис. 2.1
На основе этого явления базируется метод представления дискретно (таблично) заданной функции y = f(x) непрерывной функ-цией – сплайном S(x), удовлетворяющим следующим условиям:
1) на каждом отрезке [xi-1, xi], i = 1, 2, …, n сплайн S(x), является полиномом третьей степени;
2) сплайн S(x), а также его первая и вторая производные непрерывны на интервале [x0, xn];
3) S(xi) = yi, i = 0, 1, …, n – равенство, называемое условием интерполирования.
На каждом из отрезков [xi-1, xi], i = 1, 2, …, n, строится полином третьей степени вида:
 ,
(2.13)
,
(2.13)
где xi-1 ≤ x ≤ xi,
ai, bi, ci, di – коэффициенты, подлежащие определению.
Всего сплайн-полиномов n, значит, нужно определить 4n коэф-фициентов.
С одной стороны, при x = xi имеем из выражения (2.13) ai = Si(xi); с другой – из условия интерполирования имеем S(xi) = yi, Тогда можем записать:
ai = yi, i = 1, 2, …, n. (2.14)
Таким образом, коэффициенты ai определены. Доопределим, кроме того, a0 = y0.
Теперь остается сформировать 3n уравнений для определения коэффициентов bi, ci, di. Для этого в распоряжении имеются условия непрерывности сплайнов, а также их первых и вторых производных (условия сопряжëнности):
Si(xi) = Si+1(xi), (2.15)
S'i(xi) = S'i+1(xi), (2.16)
S''i(xi) = S''i+1(xi), (2.17)
i = 1, 2, …, n – 1.
Воспользуемся условием (2.15). С учëтом выражения (2.13) для сплайна Si(x) условие (2.15) при x = xi примет вид:
 .
.
Полученное уравнение справедливо при i = 0, 1, …, n – 1. Пере-пишем это уравнение при i = 1, 2, …, n:
 .
.
Обозначим
hi = xi – xi-1, (2.18)
тогда можем записать

Из соотношения (2.14) имеем ai = yi, ai-1 = yi-1. С учëтом этого по-лучаем уравнения:
 (2.19)
(2.19)
Таким образом, получили n уравнений. Ещë нужно 2n уравне-ний. Для их формирования воспользуемся условиями (2.16) и (2.17).
Сначала получим выражения для S'i(x) и S''i(x), продифферен-цировав выражение (2.13) для сплайна Si(x):
 , (2.20)
, (2.20)
 (2.21)
(2.21)
Теперь запишем с учëтом выражений (2.20) и (2.21) условия (2.16) и (2.17). При x = xi будем иметь

Перепишем эти уравнения, принимая i = 2, 3, …, n:
 ,
,

C учëтом обозначения (2.18) эти уравнения принимают вид:

Окончательно получаем:
 ,
(2.22)
,
(2.22)
 ,
(2.23)
,
(2.23)
i = 2, 3, …, n.
Таким образом, имеем ещë 2(n – 1) уравнений. Объединяя урав-нения (2.19), (2.22), (2.23), получим систему из n + 2(n – 1) = 3n – 2 уравнений для определения 3n неизвестных коэффициентов bi, ci, di , i = 1, 2, …, n.
Недостающие два условия получим, предположив, что в край-них точках x0 и xn вторые производные от сплайн-полиномов равны нулю (это краевые условия):
S''1(x0) = 0,
S''n(xn) = 0.
Физическое обоснование такого предположения: начиная с крайних точек, единая материальная линейка, служащая физической моделью сплайн-интерполяции и отображаемая математически на каждом отрезке аппроксимации сопряжëнными сплайн-полиномами, имеет форму прямой линии, касательной к крайнему сплайну.
Первая производная от функции, отображающей такую пря-мую, проходящую под некоторым углом, является константой, а вто-рая, соответственно, равна нулю.
Раскроем краевые условия.
Из выражения (2.21) для первого сплайна при x = x0 имеем
 .
.
С одной стороны, из обозначения (2.18) при i = 1 получаем x0 – x1 = – h1. Тогда можем записать c1 – h1d1 = 0 или h1d1 = c1.
С другой – из (2.23) при i = 1 имеем h1d1 = c1 – c0, тогда c1 = c1 – c0. Отсюда получаем дополнительное условие:
c0 = 0. (2.24)
Из выражения (2.23) для последнего n-го сплайна при x = xn имеем
 ,
,
отсюда получаем ещë одно дополнительное условие:
cn = 0. (2.25)
В итоге для определения коэффициентов bi, ci, di (ai заменены на yi, i = 1, 2, …, n – табличные значения функции) имеем следую-щую систему уравнений:
 ,
i
= 1, 2, …, n,
(2.19)
,
i
= 1, 2, …, n,
(2.19)
, i = 2, 3, …, n, (2.22)
, i = 2, 3, …, n , (2.23)
c0 = 0, (2.24)
cn = 0. (2.25)
Исключим из этой системы переменные bi, di и получим систе-му уравнений, которая содержит только ci. Для этого рассмотрим два соседние уравнения (2.19), чтобы получить разность bi – bi-1, стоящую в правой части уравнения (2.22):
 ,
,
 ,
,
отсюда
 .
.
После подстановки bi – bi-1 в (2.22) и приведения подобных чле-нов будем иметь:
 .
(2.22а)
.
(2.22а)
Теперь исключим из (2.22а) коэффициенты di и di-1. Домножив (2.23) на hi, запишем на основе этого уравнения два уравнения:
 ,
,
 .
.
После подстановки в (2.22а) приходим к уравнению:
 ,
(2.22б)
,
(2.22б)
i = 2, 3, …, n.
Эквивалентная запись уравнения (2.22б) при i = 1, 2, …, n – 1 (i на единицу меньше) будет
 (2.26)
(2.26)
Определив из (2.26) ci, можем найти di и bi:
– на основе (2.23) получаем
 (2.27)
(2.27)
при
i
= 1,
 ;
;
– на основе (2.19) получаем
 (2.28)
(2.28)
Система (2.26) сразу не может быть решена, так как для опре-деления любого ci надо иметь значения последующего ci+1 и преды-дущего ci-1. Если решать задачу с конечного i = n – 1, то для опреде-ления ci известно только ci+1 = c(n-1)+1 = cn = 0, а ci-1 неизвестно.
Задача, казалось бы, неразрешимая. Однако имеется метод для решения таких задач – метод прогонки. Воспользуемся им.
Для сокращения записей перепишем систему (2.26) в следую-щем виде:
 (2.26а)
(2.26а)
Здесь


Будем искать решение систем (2.26а) в виде:
ci = αi+1 ci+1 + βi+1, i = 0, 1, 2, …, n – 1, (2.29)
где αi+1, βi+1 – неизвестные пока коэффициенты.
Выражение (2.29) можно переписать при i = 1, 2, …, n (i на еди-ницу больше) в виде
ci-1 = αici + βi.
Подставим сюда ci из выражения (2.29):

Итак, получили выражение для ci и ci-1 через ci+1, т.е. можно исключить ci и ci-1 из (2.26а):

i = 1, 2, …, n – 1.
После приведения подобных членов получим окончательно:

Это уравнение справедливо при выполнении условий:

Из последних уравнений выражаем
 (2.30)
(2.30)
i = 1, 2, …, n – 1.
Для начала расчëта αi+1 и βi+1 нужно знать значения αi и βi. Определим их.
Уравнение (2.29) при i = 0 можно записать в виде c0= α1c1 + β1. Ранее принято c0 = 0, отсюда получаем α1 = β1 = 0.
Далее по формулам (2.30) находятся α2 и β2, …, αn и βn (это αi+1 и βi+1 при i = n – 1).
Имея значения всех прогоночных коэффициентов α и β можно вычислить по формуле (2.29) все значения коэффициентов ci, начиная с конца (i = n, n – 1, …, 1):
при i = n имеем cn= 0;
при i = n – 1 вычисляем ci = αi+1 ci+1 + βi+1, т. е. cn-1 = αncn + βn,;
в конце при i = 1 получаем c1= α2c2 + β2.
В заключение распишем более детально выражения (2.30):

из ранее принятого имеем:


Интерполяция с помощью сплайнов позволяет представлять данные на каждом отрезке между заданными точками полиномами степени не выше третьей. Это в определëнной степени несущест-венный для инженерной практики недостаток метода сплайнов перед рассмотренными выше методами Лагранжа и Ньютона.
Однако сплайн-интерполяция имеет преимущество перед интерполяцией методами Лагранжа и Ньютона, состоящее в возмож-ности адекватного отображения реальных процессов, включая коле-бательные, представленные дискретно чередованием больших и ма-лых значений колеблющейся величины.
При использовании метода сплайнов вычисляемые по выраже-ниям сплайн-полиномов значения в промежуточных точках между узлами интерполяции не дают отклонений колеблющейся величины, превышающих реальные. Это объясняется тем, что физической моде-лью сплайн-интерполяции служит упругая линейка, принимающая форму, при которой запасенная в ней упругая (потенциальная) энер-гия будет минимальна (об этом было сказано в начале рассмотрения метода сплайнов).
Метод сплайн-интерполяции нашёл широкое применение в инженерной практике. Однако его не следует использовать для интер-поляции дискретно (по отдельным точкам) заданных кусочно-прямо-линейных зависимостей, отображаемых ломаными линиями. Это ограничение следует из свойства упругости линейки, лежащей в фи-зической основе метода. Упругая линейка не может принимать форму ломаной линии. Она всегда будет плавной кривой и только при доста-точно большом количестве заданных в узлах интерполяции точек приближается к отрезкам прямых.
Для интерполяции данных, представляемых кусочно-прямоли-нейными зависимостями, имеется метод линейной регрессии (част-ный случай аппроксимации данных рассматриваемым ниже методом наименьших квадратов).