

3. Кинематический синтез плоских рычажных
МЕХАНИЗМОВ
Рычажные механизмы с низшими кинематическими парами получили широкое распространение в современном машиностроении. К достоинствам таких механизмов относятся: высокая технологичность изготовления, возможность использования подшипников качения в кинематических соединениях, возможность передачи больших усилий при малом износе соприкасающихся поверхностей, надежность и долговечность в работе. В этих механизмах не требуется устройств, обеспечивающих постоянное замыкание кинематических пар, в отличие от кулачковых механизмов.
Механизмы создаются из условий удовлетворения требований технологического процесса. Проектирование механизмов является сложной задачей, решение которой можно разбить на два этапа. Первый этап синтеза механизмов состоит в выборе кинематической схемы, обеспечивающей требуемый вид и закон движения выходного звена и общие условия работоспособности механизмов. Во втором этапе разрабатываются конструктивные формы звеньев и кинематических пар, обеспечивающих прочность и надежность механизма. В нашем курсе рассматривается только первый этап синтеза.
Схема механизма, как правило, выбирается на основе опыта, применительно к данным конкретным условиям. Затем определяют параметры синтеза, т.е. длины звеньев и координаты точек, обеспечивающих требуемые траектории и т.д., а также дополнительные условия синтеза.
К дополнительным условиям синтеза можно отнести условие существования кривошипа, а также условие передачи сил.
Условие передачи сил
Качество передачи сил в машинах принято характеризовать углом давления λ, определенным без учета сил тяжести звеньев и сил инерции.
Угол давления λ – это острый угол между вектором силы, действующей на ведомое звено со стороны смежного с ним подвижного звена, и вектором абсолютной скорости точки приложения этой силы.
Угол передачи движения γ дополняет угол давления до 90°:
γ = 90° – λ .
На стадии метрического синтеза ограничивают предельно допустимые углы давления [λ max] и передачи движения [γmin], как правило, принимая их:
[λ max] ≤ 30° и [γmin] ≥ 60° для поступательно движущегося ведомого звена, и
[λ max] ≤ 40°...45° и [γmin] ≥ 50°...45° – для вращающегося ведомого звена.
Рассмотрим условие передачи сил в шарнирном четырехзвеннике, находящемся в равновесии под действием моментов движущего МД и момента сопротивления МС (рис. 3.1). Угол давления λ характеризует соотношение между полезной силой сопротивления F23 cos λ , преодолевающей момент сопротивления МС , и силой F23 , равной
F23 = МС /(lВС ∙ cos λ).

Рис.3.1. Угол λ давления в шарнирном четырехзвеннике
С увеличением угла давления необходимо прикладывать большую силу F23 для преодоления одного и того же момента сопротивления. Это ведет к увеличению реакций в кинематических парах и снижению КПД механизма.
При движении механизма угол давления меняется. Экстремальных значений этот угол в шарнирном четырехзвеннике достигает в положениях, когда кривошип ОА располагается на одной прямой со стойкой ОС (рис. 3.2).
Рис.3.2. Положения механизма, при которых углы давления достигают
экстремальных значений
В кривошипно-ползунном механизме угол давления приобретает экстремальные значения в положениях, указанных на рис. 3.3, когда кривошип ОА перпендикулярен траектории движения ползуна В.
Рис. 3.3. Положения механизма, при которых углы давления
имеют экстремальные значения.
Ниже рассмотрены наиболее часто встречающиеся в курсовых проектах задачи кинематического синтеза механизмов.
Синтез шарнирного четырехзвенника по коэффициенту изменения средней скорости и двум крайним положениям коромысла
Коэффициент k изменения средней скорости ведомого звена равен k = VC 2– 1 / VC 1– 2 ,
где VC 1– 2 − средняя линейная скорость точки С (рис. 3.4) при рабочем ходе, VC 2– 1 − то же при обратном ходе.
Примем k > 1, так как при проектировании механизмов, как правило, время возврата в исходное положение принимается меньше времени рабочего хода, поэтому k > 1.
Нетрудно доказать, что k = (180° + θ) /(180° – θ).
Откуда θ = 180° (k −1) /(k +1),
где q − угол между положениями шатуна BC в начале и в конце рабочего хода.
Введем обозначения:
l1 – длина кривошипа АВ, (см. рис. 3.4); l2 – длина шатуна ВС;
l3 – длина коромысла CD; l4 – расстояние между опорами (длина стойки АD).
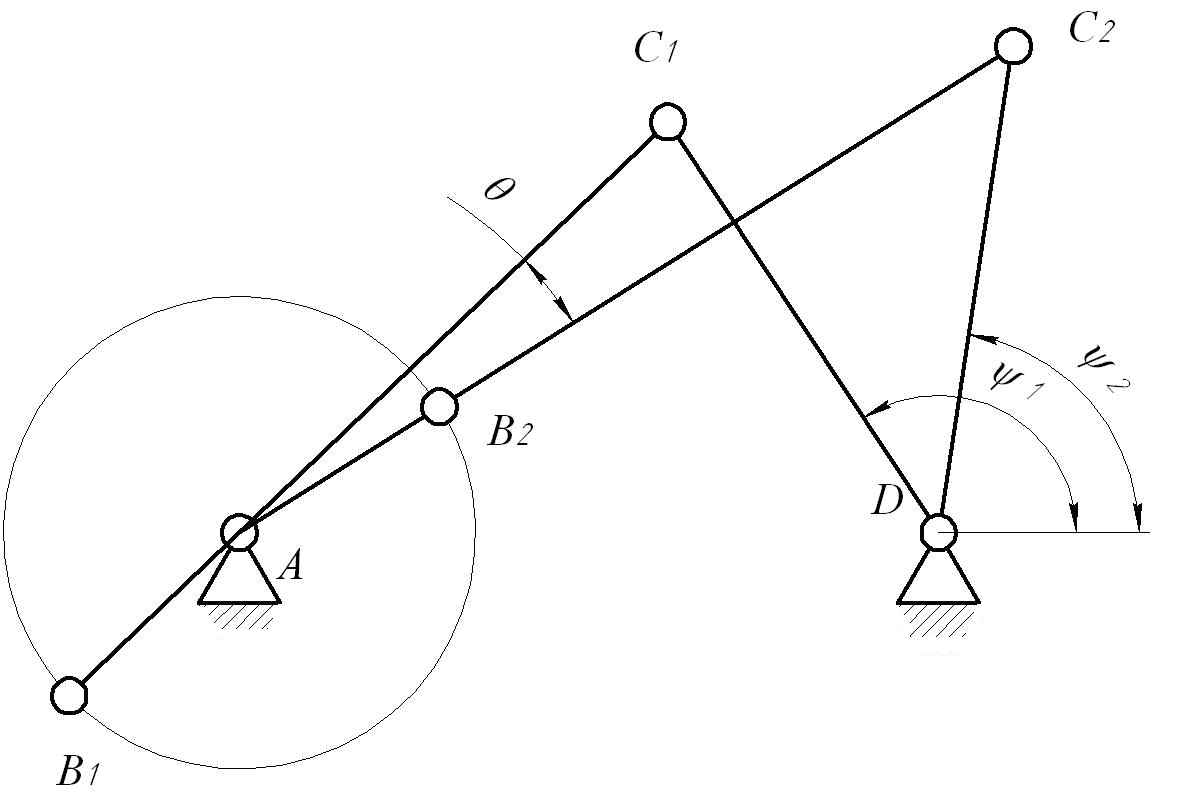
Рис. 3.4. Схема механизма в положениях, соответствующих значениям заданных углов ψ
Задавшись углами ψ1 и ψ2, а также коэффициентом k, изобразим два крайних положения коромысла CD (рис. 3.5).
Точки
С1
и С2
соединим прямой. Вычислим угол q
между крайними положениями шатуна ВС.
При точке С2
построим угол γ = 90° −
θ,
а из точки С1
опустим перпендикуляр к линии С1С2
до пересечения с линией, проведенной
из точки С2
и образующей угол γ. Точку пересечения
названных линий обозначим О.
Очевидно, что в прямоугольном треугольнике
OС1С2
угол С1ОС2
= θ. По трем точкам O,
С1
и С2
опишем окружность. Вписанный угол с
вершиной в точке О
опирается на дугу
![]() и равен углу θ, так же как и все вписанные
углы, опирающиеся на эту же дугу. Выберем
на окружности с центром в точке О
произвольную
точку
А
и соединим ее прямыми отрезками с
точками С1
и С2.
В результате, расположив опору кривошипа
в точке А,
получим схему четырехзвенного механизма
в крайних положениях (см. рис. 3.5).
и равен углу θ, так же как и все вписанные
углы, опирающиеся на эту же дугу. Выберем
на окружности с центром в точке О
произвольную
точку
А
и соединим ее прямыми отрезками с
точками С1
и С2.
В результате, расположив опору кривошипа
в точке А,
получим схему четырехзвенного механизма
в крайних положениях (см. рис. 3.5).
Рис. 3.5. Синтез шарнирного четырехзвенника по коэффициенту k
изменения средней скорости и двум крайним положениям коромысла
Из рисунка следует АС1 = В1С1 −АВ1 = l2 − l1; АС2 = В2 С2 −АВ2 = l2 + l1.
Откуда l1 = 0,5 (АС2 −АС1) μ l / 2; l2 = АС2 − l1.
Длина стойки АD = l4 определится положением точки А.
Поскольку положение точки А выбиралось произвольно, имеет место многовариантность решения задачи. Это позволяет вводить дополнительные условия, например, условие передачи сил, наличие или отсутствие эксцентриситета расположения опор по отношению к координатной оси.
Синтез кулисного механизма по коэффициенту k изменения
средней скорости кулисы
Дано: коэффициент k изменения скорости хода и два крайних положениям точки В кулисы ВС.
Рассмотрим кулисный механизм в двух крайних положениях (рис. 3.6).
Рис. 3.6. Синтез кулисного механизма
Угол между положением кривошипа ОА2 и продолжением кривошипа в положении ОА1 равен θ = 180° (k −1) /(k +1). Углы В1С В2 и q будут равны между собой, как углы с взаимно перпендикулярными сторонами.
На прямой В1 В2 строим равнобедренный треугольник с углом при вершине С, равным углу q. На прямой, делящей угол q пополам в произвольной точке, выбираем точку О, вокруг которой вращается кривошип ОА. Опустив из точки О перпендикуляр на прямую В1С (или В2С), найдем длину кривошипа ОА. Полученный кулисный механизм будет удовлетворять заданным условиям. Построение кулисного механизма по заданным условиям происходит следующим образом. Точки В1 и В2, положение которых задано, соединим прямой.
Синтез кривошипно-ползунного механизма
Примем следующие условные обозначения (рис. 3.7):
Рис. 3.7. Схема кривошипно-ползунного механизм
r – длина кривошипа ОА; Н – ход ползуна; l – длина шатуна АВ;
е – дезаксиал, т.е. смещение траектории точки В ползуна относительно оси Ох ;
L = l/r – относительная длина шатуна;
ν = е/ r – относительный дезаксиал;
h = H/r – относительный ход ползуна;
λмах – максимальный угол давления (см. рис. 3.3);
k − коэффициент изменения средней скорости ползуна (см. § 3.1)
ψ1
и ψ
2
– острые углы, образованные кривошипом
ОА
с
направлением Ох
в
крайних положениях ползуна: φ1
=
![]() В1Ох,
φ2
=
В2Ох
;
В1Ох,
φ2
=
В2Ох
;
θ = ψ2 – ψ 1 – острый угол между шатунами в крайних положениях ползуна.
Задача 1. Дано: Н, е, L = l/r.
Найти: r; l; ׀λмах ׀.
Решение:
![]() .
.
Длина кривошипа ОА: r = H / h. Длина шатуна АВ: l = L r.
Наибольшее значение угла давления ׀ λмах׀ = arc sin [(1 + ν) /L] .
Задача 2. Дано: Н, k, L= l/r.
Найти: r; l; e; ׀ λмах ׀.
Решение:
Острый угол между шатунами в крайних положениях ползуна
θ = 1800∙(k–1)/(k+1).
Относительный ход ползуна найдем из выражения
h = {2∙[1+L2 – (L2 – 1)∙cos θ]}0,5.
Относительный дезаксиал найдем из выражения
ν = [(h –2)∙(L 2 –1)]0,5.
Длина кривошипа r = H/ h; длина шатуна l = L r; дезаксиал е = ν r.
Наибольшее значение угла давления λмах = arc sin [(1 + ν) / L].