

Порядок выполнения работы
Сформировать исходные матрицы: А размерности (3×3), В и С размерности (3×4) и векторы b и c соответствующих размерностей.
Вычислить:
- определитель, след матрицы;
- транспонированные матрицы, их сумму, разность, произведение скалярной величины на матрицу, скалярное произведение матриц, евклидовы нормы, обратную и псевдообратную матрицу;
- произведение матрицы на вектор, строки на матрицу;
векторное произведение вектора на строку;
- собственные значения и собственные векторы сформированных матриц.
Оформление отчета
Подготовьте отчет о выполненной лабораторной работе. Он должен содержать титульный лист, формулировку задания, результаты матричных вычислений.
Сформулируйте выводы, которые можно сделать по результатам выполненной работы.
Вариант титульного листа отчета, можно найти на http://standarts.guap.ru
В процессе сдачи отчета студент должен ответить на предлагаемые контрольные вопросы и выполнить упражнения по изучаемой теме.
Контрольные вопросы
Условие невырожденности матрицы.
Что такое след матрицы?
С помощью каких операторов вычисляются в MATLAB обратная и псевдообратная матрицы?
Могут ли собственные значения матрицы выражаться комплексными числами?
Выполняются ли условия коммутативности для произведения матриц?
Лабораторная работа № 2. MATLAB – основы моделирования
Цель работы: приобретение основных навыков работы с моделирующими программными пакетами MATLAB.
Структура и возможности моделирующих пакетов
Основные сведения
MATLAB – система программирования высокого уровня. Она может функционировать как интерпретатор и включает большой набор команд для выполнения разнообразных вычислений, задания структур данных и графического представления результатов расчетов. Для моделирования процессов используются команды пакета прикладных программ Control System Toolbox, предназначенного для работы с LTI–моделями (Linear Time Invariant Models) систем управления.
MATLAB Simulink – интерактивный инструмент для моделирования, анализа и синтеза динамических систем на основе библиотеки блоков. Simulink является самостоятельным инструментарием MATLAB, но доступ к функциям MATLAB и другим его инструментам остается открытым. Имеются дополнительные библиотеки блоков для разных областей применения (моделирование процессов в различного видах объектов управления и управляющих устройств, набор блоков для разработки цифровых устройств и т.д.).
Основные принципы работы и моделирования
Лабораторные работы данного практикума выполняются на основе или команд СST или операционных блоков MATLAB Simulink.
Для работы с СST необходимо запустить программу MATLAB и далее работать в командном окне среды MATLAB (рисунок 2.1), используя набор команд, приведенных в лабораторных работах.



Рисунок 2.1 – Командное окно MATLAB
Для работы с MATLAB Simulink, после запуска программы MATLAB, необходимо открыть в меню FileNewModel. В открывшемся окне (рисунок 2.2) собираются модели систем из операционных блоков библиотеки Simulink.

Рисунок 2.2 – Окно MATLAB Simulink
Окно библиотеки блоков запускается нажатием кнопки Library Browser в меню Simulink и состоит из различных прикладных разделов (рисунок 2.3)
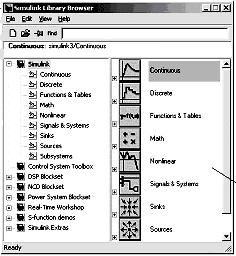

Рисунок 2.3 – Библиотека MATLAB Simulink