

Федеральное агентство по образованию
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ГОРНЫЙ УНИВЕРСИТЕТ
Кафедра
«Автоматики и управления в технических системах»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторной работы
по дисциплине:
«Информационные сети и телекоммуникации»
ИССЛЕДОВАНИЕ ВРЕМЯ-ИМПУЛЬСНОЙ СИСТЕМЫ ТЕЛЕИЗМЕРЕНИЯ С ДВОЙНЫМ ВИДОМ МОДУЛЯЦИИ (ШИМ-АМ)
Продолжительность работы
4 часа
Москва 2011
1.Цель работы
Целью данной работы является исследование системы телеизмерения (ТИ) с двойным видом модуляции типа ШИМ-АМ.
Изучаются способы реализации отдельных блоков системы ТИ и совместное их взаимодействие с последующим составлением временных зависимостей.
Анализируется работа системы ТИ и производится передача входного сигнала по проводным линиям связи.
2.Описание лабораторного стенда
На лабораторном стенде смонтированы блок передатчика и блок приемника. Мнемосхема представляет собой принципиальную схему устройства, в характерных точках которой вмонтированы клеммы, ключи управления, лампочка сигнализации включения питания, два измерительных прибора. Питание системы ТИ осуществляется от сети переменного тока с напряжением 220 В.
3.Измерительная аппаратура
Электронный осциллограф С1-102
Генератор звуковой частоты ГЗ-112/1
Цифровой вольтметр В7-32 (2 ед.)
4.Теоретические сведения
Системы, использующие ШИМ, относятся к классу систем, в которых осуществляется дискретизация непрерывного входного сигнала по времени. В результате этого непрерывный полезный модулирующий сигнал (ПМС) заменяется последовательностью выборок, т. е. решетчатой функцией. Следовательно, выходной сигнал определяется не входным сигналом как таковым, а его решетчатой функцией, т. е. зависимость выходного сигнала от входного существует только в одной точке каждого интервала дискретизации.
Требования «гладкости» обеспечиваются использованием относительно большой частоты дискретизации по сравнению с верхней граничной частотой ПМС и частотой среза АЧХ непрерывной части дискретной системы, выполняющей роль демодулирующего фильтра. Поэтому ПС является медленно меняющейся функцией (соответствует макропроцессу) по сравнению с быстро изменяющейся функцией модулированного несущего сигнала (характеризует микропроцесс).
Основная проблема, решаемая в таких системах,— это выделение ПС, искаженной дискретизацией; основной объект исследования — макропроцессы, отображающие ПМС, а конкретная задача, решаемая при исследовании, — нахождение такого отношения между частотой дискретизации и верхней граничной частотой ПМС, обозначим как коэффициент следования, при котором искажения ПС не превышают заданных.
Другое решение основано на характерном для квазинепрерывных систем представлении выходного сигнала в виде непрерывной ПС, имеющей спектрально-корреляционные характеристики входного ПМС, и некоторой эквивалентной помехи, которая в общем случае может быть нестационарной. Тогда задача решается на основе того же аппарата рядов Фурье, но с использованием разработанных в теории импульсной радиосвязи методов, например метода деформации периодической импульсной последовательности или разложения в ряды Фурье по почти периодическим функциям. В последнем случае удается получить выражение спектра модулированной ШИМ -последовательности даже для переменного интервала дискретизации (асинхронные методы ШИМ).
Использование спектрального метода анализа систем с ШИМ, так как спектральное выражение модулированной импульсной последовательности на выходе системы позволяет определить амплитуду и форму ПС, а также получить выражение для эквивалентной помехи. Кроме того, спектральное представление дает возможность легко вычислить искажения ПС на выходе фильтра, если известны характеристики последнего: тип аппроксимации, порядок фильтра и коэффициент следования, т. е. решить задачу анализа квазинепрерывных систем, либо, наоборот, — по заданным искажениям ПС определить коэффициент следования и характеристики фильтра, т. е. решить первый этап задачи синтеза таких систем.
Другой довод в пользу спектрального метода состоит в том, что аналитическое выражение сигнала на выходе системы получается одинаково просто при любой глубине модуляции М, тогда как применение традиционного аппарата, используемого в импульсных системах, а также методов, основанных на линеаризации нелинейных звеньев, дает удовлетворительные результаты только при малой глубине модуляции.
Обычно под динамическим диапазоном системы (устройства) понимают величину, равную отношению максимальной входной величины к порогу чувствительности системы (устройства). Под порогом чувствительности понимают минимально различимый данным устройством (при заданном алгоритме обработки или обнаружения) сигнал на фоне помех. В нашем случае под порогом чувствительности (для гармонического ПМС на входе) подразумевается такой минимальный сигнал, для которого СКИ равно единице, т. е. его мощность равна мощности эквивалентной помехи при заданном типе фильтра. Под максимальной входной величиной ПМС, как и обычно, понимается сигнал, уровень искажений которого не превышает заданного. Такое определение динамического диапазона не противоречит исходным предпосылкам и позволяет однозначно связать динамический диапазон с видом и параметрами используемой модуляции, а также типом и порядком демодулирующего ФНЧ, т. е. позволяет характеризовать модем в целом. Вместе с тем оно предполагает (для квазинепрерывных систем это предположение обычно выполняется), что уровень эквивалентной помехи за счет дискретизации выше, чем уровень аддитивных помех в системе.
4.1Время-импульсная модуляция (вим)
Импульсные модулированные сигналы формируются в виде периодических дискретных посылок тока (импульсов), причем в качестве параметра модуляции используются амплитуда, длительность, фаза (момент возникновения) и частота следования импульсов. Соответственно различают амплитудно-импульсную, широтно-импульсную, фазо-импульсную и частотно-импульсную модуляцию. Поскольку как при широтно-импульсной, так и при фазо-импульсной модуляции изменяются временные характеристики периодически следующих импульсов. Эти два вида модуляции объединяют понятием, время-импульсной модуляции.

а) односторонняя
б) двусторонняя
рис 4.1.1. Широтно-импульсная модуляция
Время-импульсная модуляция имеет две модификации: широтно-импульсную модуляцию (ШИМ) и фазо-импульсную модуляцию (ФИМ).
При ШИМ параметром модуляции является длительность импульса (рис. 4.1.1). Различают одностороннюю (несимметричную) (рис. 4.1.1 а)) и двустороннюю (симметричную) ШИМ (рис. 4.1.1 б)).
При ФИМ-смещении оси короткого импульсного сигнала относительно фиксированного момента времени t0 в тактовой точке (рис. 4.1.2).

рис. 4.1.2. Фазо-импульсная модуляция
Фазо-импульсную модуляцию можно рассматривать как производную от ШИМ и наоборот. Не приводя здесь сравнительно сложных выводов уравнения спектра сигналов, отметим только основное: при модуляции гармоническим колебанием, в отличие от АИМ, кроме составляющих ω0, Ω и боковых частот вида kω0 ± Ω, спектр ШИМ и ФИМ будет содержать также множество боковых частот типа kω 0 ± nΩ (n = 1, 2, …, ∞).
Однако и в этом случае полоса пропускания будет определяться в основном длительностью импульса tи (при ШИМ — минимальной).
4.2Повторная модуляция
При передаче сигналов по линиям связи часто прибегают к повторной модуляции, при которой относительно низкочастотный сигнал, первоначально модулированный сообщением с применением одного из рассмотренных выше видов модуляции (первая ступень модуляции), в свою очередь осуществляет модуляцию высокочастотных несущих колебаний, передаваемых по линии связи (вторая ступень модуляции).
При этом модуляции первой и второй ступеней могут различаться. Таким образом составляются системы сигналов повторной модуляции АИМ – ЧМ, АИМ – ФМ, ШИМ – АМ, ШИМ – ЧМ (ФМ), ФИМ – АМ, ФИМ – ЧМ (ФМ), ЧИМ – АМ, ДИМ – ЧМ (ФМ). Иногда применяются также три и более ступеней модуляции (например, ШИМ – ЧМ – АМ).
4.3Виды сигналов и выбор их параметров
Во время-импульсных системах ТИ используются два вида первичной модуляции: ШИМ и ФИМ (рис. 4.3.1 а), б)).
При ФИМ для простоты демодуляции на приемной стороне передают обычно не только последовательность импульсов, смещенных по фазе (по времени) в соответствии со значениями ординат измеряемой величины, но и последовательность несмещенных опорных импульсов. Иными словами, каждый элементарный сигнал состоит из двух импульсов: опорного и отсчетного, а информацию несет интервал между их фронтами.
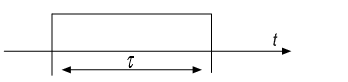
а) ШИМ
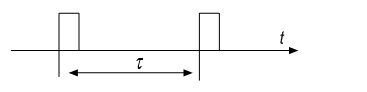
б) ФИМ
рис. 4.3.1. Элементарные сигналы.
Обычно интервал ТС от начала одного элементарного сигнала до начала следующего является постоянным. В целях повышения среднего быстродействия устройства можно сделать так, чтобы следующий элементарный импульс начинался сразу по окончании предыдущего. В устройстве с ШИМ при этом между сигналами следовали бы короткие паузы равной длительности, а в устройстве с ФИМ отсчетный импульс данного сигнала служил бы опорным импульсом для последующего сигнала. Однако такой способ передачи распространения не получил, и в данной работе рассматриваются только устройства с периодическими сигналами.
Как правило, τ линейно зависит от измеряемой величины х, причем диапазон возможных значений τ начинается не от нуля, а от некоторой величины τмин. Для сигнала ФИМ необходимость этого очевидна: значение τмин должно, по крайней мере, превышать длительность опорного импульса. Сигнал ШИМ, на первый взгляд, мог бы начинаться от τ = 0. Но нужно учитывать искажения фронтов, вызванные тем, что канал связи имеет ограниченную полосу частот: благодаря им узкий импульс оказывается существенно меньше по амплитуде, чем широкий, и это затрудняет не только измерение его длительности на приемной стороне, но даже его обнаружение. Поэтому и диапазон сигналов ШИМ начинают не с нулевой длительности. Общий вид зависимости τ от измеряемой величины х таков:

Период повторения сигналов TС должен превышать τмакс. В случае ШИМ это превышение должно быть таким, чтобы пауза была обнаружена, несмотря на искажения фронтов за счет ограниченности частотной полосы канала связи. В случае ФИМ нужно еще дополнительно учесть длительность отсчетного импульса. Часто разность (TС - τмакс) выбирают равной τмин. В многоканальном устройстве ТИ с временным разделением каналов простейший вариант передачи — циклический. Диаграмма сигналов для этого случая (применительно к модуляции типа ФИМ) показана на рис. 4.3.2.

рис. 4.3.2. Диаграмма сигналов для многоканальной системы ТИ с ФИМ
Каждый цикл передачи (длительностью T) содержит n элементарных сигналов (длительностью Tс), соответствующих n каналам измерения, и один дополнительный сигнал — синхроимпульс СИ, отличающийся от остальных по длительности и позволяющий синхронизировать коммутаторы.
Параметры сигнала следует выбирать с учетом параметров канала связи и требований к точности телепередачи. Главный фактор, определяющий точность телепередачи, это искажение сигнала помехами. Теоретически в отсутствие помех погрешность телепередачи можно свести к нулю, несмотря на искажения формы сигнала за счет ограниченности частотной полосы канала связи и изменения амплитуды сигнала за счет изменений затухания. Только дополнительную погрешность от действия помех исключить принципиально невозможно. Величина этой погрешности зависит не только от характеристик самих помех, но и от параметров канала связи и сигнала.
Амплитуда сигнала
должна быть возможно большей, так что
выбор ее определяется предельными
возможностями канал образующей
аппаратуры. Диапазон изменений
длительности сигнала целесообразно
выбирать исходя из заданной допустимой
погрешности
![]() ,
,
 ,
,
где
β
– коэффициент ослабления сигнала при
демодуляции (![]() ),
),
S0 – удельная дисперсия шума, приходящаяся на полосу частот
шириной в 1 Гц,
![]() =
=![]() коэффициент
модуляции,
коэффициент
модуляции,
![]() – заданная
допустимая погрешность модуляции.
– заданная
допустимая погрешность модуляции.
Если исходить только из погрешности отдельных отсчетов, пренебрегая быстродействием, то вместо равенства следовало бы записать неравенство. С увеличением разности (τмакс - τмин) эта погрешность уменьшается. Однако нужно иметь в виду, что при этом увеличиваются и период элементарного сигнала TС и длительность цикла Т, следовательно, растет интервал между дискретными отсчетами каждой измеряемой функции времени и увеличивается погрешность аппроксимации её по этим отсчетам. Величина τмин при ФИМ должна быть, по крайней мере, вдвое больше длительности опорного импульса с учетом того, чтобы спад последнего на выходе канала связи успевал достаточно затухнуть к моменту появления отсчетного импульса. Длительность же опорного импульса τи должна быть такой, чтобы амплитуда его на выходе канала связи достигала, по крайней мере, 90% значения, которое устанавливается при неограниченной длительности импульса. Исходя из этого, рекомендуется брать
 ,
,
 .
.
Отсчетный импульс целесообразно выбирать той же длительности τи, что и опорный. Превышение периода TС над величиной τмакс, как указывалось, часто берут равным τмин. Tогда,
![]()
Эти соотношения можно принять и для случая ШИМ. В многоканальном устройстве с циклической передачей сигналов по диаграмме, показанной на рис. 4.1.2, длительность цикла:
![]() .
.
Длительность синхроимпульса должна в несколько раз превышать τи для простоты на СИ вместе с паузой отводят период TС.