

 Министерство
образования Российской Федерации
Министерство
образования Российской Федерации
Уфимский государственный авиационный технический университет
Кафедра АТС
Курсовая работа
по теории автоматического управления
“Система автоматического управления гидросуппортом токарного станка”
Вариант 7-2
Выполнил:
студент группы АТП-305
Чувак.
Проверил:
преподаватель
Перевертайло Ю.В.
Ишимбай 2004
 Вариант
7 –
Система автоматического управления
гидросуппортом
токарного станка
Вариант
7 –
Система автоматического управления
гидросуппортом
токарного станка
САУ предназначена для управления гидросупортом токарного станка.
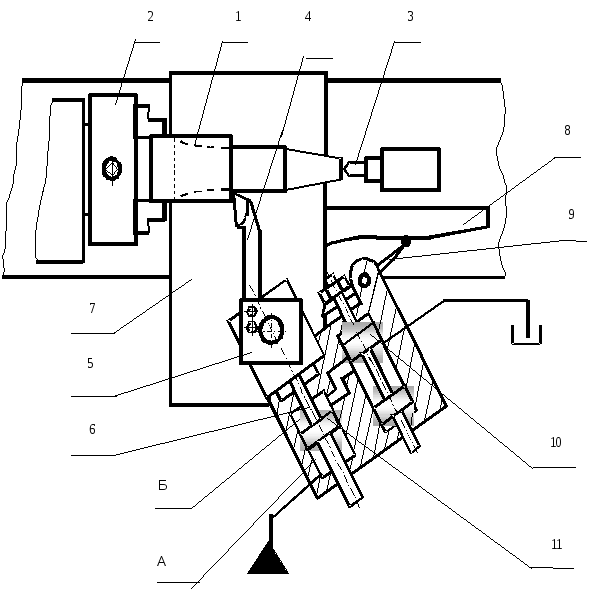

Гидравлические копировальные устройства, применяемые на токарных станках, предназначены для автоматизации процесса обработки сложных фасонных поверхностей деталей машин, имеющих, как правило, круглое поперечное сечение.
Обрабатываемая деталь 1 установлена в патроне 2 и в заднем центре 3 токарного станка. Резец 4 закреплен в резцедержателе каретки 5, связанной со штоком цилиндра 6 и расположенной на направляющих суппорта 7. С копиром 8 взаимодействует щуп 9 однокромочного золотника 10. Полости А и Б цилиндра 6 соединены между собой постоянным дросселем 11.
При обработке детали 1 сообщается вращение для создания скорости
резания, а суппорту 7 - движение продольной подачи. Рабочая жидкость под давлением проводится в полость А цилиндра и через постоянный дроссель 11
 попадает
в полость Б, откуда через щель золотника
10 на слив.
На схеме видно, что величина давления
в полости Б определяется открытием щели
золотника
10 и величиной
проводимости постоянного дросселя
11.
В
нейтральном положении (при неподвижном
гидросуппорте) давление
в полостях А и Б таково, что поддерживается
равновесие цилиндра
6.
попадает
в полость Б, откуда через щель золотника
10 на слив.
На схеме видно, что величина давления
в полости Б определяется открытием щели
золотника
10 и величиной
проводимости постоянного дросселя
11.
В
нейтральном положении (при неподвижном
гидросуппорте) давление
в полостях А и Б таково, что поддерживается
равновесие цилиндра
6.
РА· FА = РБ · FБ
При прохождении щупа 9 по копиру 8 изменяется осевое открытие щели золотника 10, а следовательно и давление в полости Б. Цилиндр 6 перемещается и перемещает корпус золотника 10. Это перемещение происходит до тех пор, пока вновь не установится равновесное состояние. Таким образом, цилиндр 6 с резцом 4 полностью отрабатывает перемещение, заданное копиром 8 и на заготовке 1 формируется заданная поверхность.
В САУ гидросуппорта в качестве объекта управления входит процесс резания в замкнутой технологической системе станка.
|
ТГУ, с |
КГУ, мм2/с |
КГЦ , 1/мм2 |
ТР, с |
СРУ |
XРУ |
УРУ |
V, м/мин |
t, мм |
n |
KV |
w0 , 1/с |
|
С Н/мм |
|
0,05 |
2·106 |
2·10-4 |
0,002 |
3·103 |
0,9 |
0,5 |
200 |
2 |
0,2 |
1,0 |
500 |
0,9 |
5·103 |
Функциональная схема сау. Описание функций входящих элементов
U3 ΔU
ГУЗТ ГЦ Процесс резания











ЭУСС



Процесс резания
Передаточная функция процесса резания:
 W= KР
/ (TР
+ 1)
,
W= KР
/ (TР
+ 1)
,
где KР – коэффициент резания;
ТР - постоянная времени стружкообразования, с.
Коэффициент резания KР зависит от силы резания и параметров резания
KР = KРS ·KPt · KPост ,
где KРS = PS / S – составляющая коэффициента резания по подаче;
KPt = Pt / t – составляющая коэффициента резания по глубине;
KPост – составляющая коэффициента резания от прочих параметров резания.
Сила резания при точении :
![]()