

Министерство образования Российской Федерации
Уфимский государственный авиационный технический университет
Кафедра автоматизированных технологических систем
КУРСОВОЙ ПРОЕКТ
«Теория автоматического управления»
Группа: АТП-304
Выполнил: Горбунов С.
Принял: Перевертайло Ю.В.
ИШИМБАЙ 2004
Содержание
1. Введение. - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
2. Конструктивная схема заданной САУ с исходными данными. - - -
3.Функциональная схема САУ. - - - - - - - - - - - - - 4. Дифференциальные уравнения и передаточные функции всех элементов. Типовые динамические звенья. - - - - - - - - - - - - - - - - - - - -
5.Структурная схема (модель) САУ. - - - - - - - - - - - - - - - - - - - - - - - - - -
6.Определение устойчивости заданной САУ. - - - - - - - - - - - - - - - -
7.Настройка чувствительности и определение основных показателей качества работы САУ. - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
8. Синтез САУ с учетом дополнительных условий и ее анализ. - - - -
9. Выводы по работе и заключение. - - - - - - - - - - - - - - - - - - - - - - - -
1. Введение
В курсовой работе поставлены следующие цели и задачи :
задачи – анализ и синтез САР ; цели – применение теоретических знаний и приобретение умений, получение навыков представления процесса механической обработки металла как объекта управления ; апробация знаний анализа и синтеза САР с заданными показателями качества.
Нам предстоит решать задачу анализа и синтеза САР, поэтому требуется глубокое понимание принципов: работы САР, идентификации элементов САР в виде типовых динамических звеньев, анализа устойчивости САР, построения переходной функции выходной координаты САР, поэтому при решении поставленных задач с применением ЭВМ необходимо тщательно разобраться каким образом ЭВМ решает поставленную задачу и уметь интерпретировать результаты, полученные на ЭВМ.
Для решения проблем анализа и синтеза САР рекомендуется применить наиболее отработанный инженерный метод, дающий быстрый результат, обладающий большой наглядностью, позволяющей глубоко осознать принцип работы и коррекции САР – метод логарифмических частотных характеристик.
2. Конструктивная схема заданной сау с исходными данными. Краткое описание назначения и принципа действия сау.
В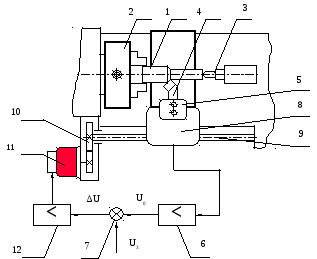 ариант
1 – Система
автоматического управления
продольной подачей при точении
ариант
1 – Система
автоматического управления
продольной подачей при точении
САУ предназначена для стабилизации, либо изменения по определенному закону силы резания при точении за счет управления продольной подачей.
На точность обработки при точении большое влияние оказывает сила резания, в частности, ее составляющая РУ. Вследствие случайных колебаний припуска, твердости заготовки, затупления резца и других факторов сила резания при точении непостоянна, что приводит к изменению упругих деформаций технологической системы станка и образованию погрешностей обработки. Значительно повысить точность токарной обработки можно за счет стабилизации силы резания. Кроме того, при обработке нежестких деталей, например, обточке валика без люнета, для устранения погрешности, вызванной упругими деформациями, необходимо регулировать силу резания по определенному закону в зависимости от податливости детали в месте точения.
Деталь 1 установлена в патроне 2 и в заднем центре 3 токарного станка. Резец 4 установлен в устройстве 5, выполняющем функции преобразователя силы (например: тензометрический динамометр), которое через усилитель 6 подключено ко входу устройства сравнения 7.
Движение подачи суппорту 8 сообщается через ходовой винт 9, редуктор 10 от регулируемого двигателя 11. Для питания двигателя 11 служит усилитель-преобразователь 12.
САУ работает следующим образом. На вход сравнивающего устройства 7 подается сигнал Uз соответствующий требуемому значению составляющей РУ силы резания в определенном масштабе. На другой вход устройства 7 поступает сигнал UО, вырабатываемый преобразователем силы 5 и усилителем 6. Этот сигнал соответствует реальному значению составляющей РУ силы резания. Ошибка U = UЗ – UО поступает на вход усилителя-преобразователя 12, который вырабатывает напряжение питания двигателя 11, определяющее величину продольной подачи так, чтобы свести рассогласование к минимуму. Таким образом, САУ за счет управления по продольной подаче осуществляет стабилизацию силы резания на заданном уровне. В качестве объекта управления в САУ входит процесс резания и упругая система станка.
Значения данных приведены в таблице .
|
ТЭУ , с |
КЭУ |
ТТП , с |
КТП |
КР |
ТЯ , с |
ТМ , с |
КД , 1/сВ |
К n , B/H |
ТР , с |
СРУ |
|
0 |
300 |
0,05 |
13 |
0,02 |
0 |
0,33 |
1,3 |
3·10-3 |
0 |
4·103 |
|
ХРУ |
УРУ |
V, м/мин |
n |
t0, мм |
КV |
w0, 1/с |
|
С, Н/мм |
|
1,0 |
0,7 |
180 |
0,2 |
3,0 |
1,2 |
180 |
0,7 |
4·104 |