1.2. Структурный анализ механизма
Структурный анализ механизма проведём для определения класса, порядка и вида структурных групп Л.В. Ассура, входящих в механизм, и для определения класса и порядка механизма.
Степень подвижности определяем по формуле П.Л.Чебышева:
![]() ,
,
где n – число подвижных звеньев; р5 – число кинематических пар 5-го класса; р4 – число пар 4-го класса.
Для данного кулисного механизма n=5,
![]() =7,
=7,
![]() =0.
=0.
Следовательно,
W=3*5-2*7=1 и значит, что W =
![]() механизм одноподвижный.
механизм одноподвижный.
Для дальнейшего анализа выделяется структурная группа наиболее удалённая от начального механизма.
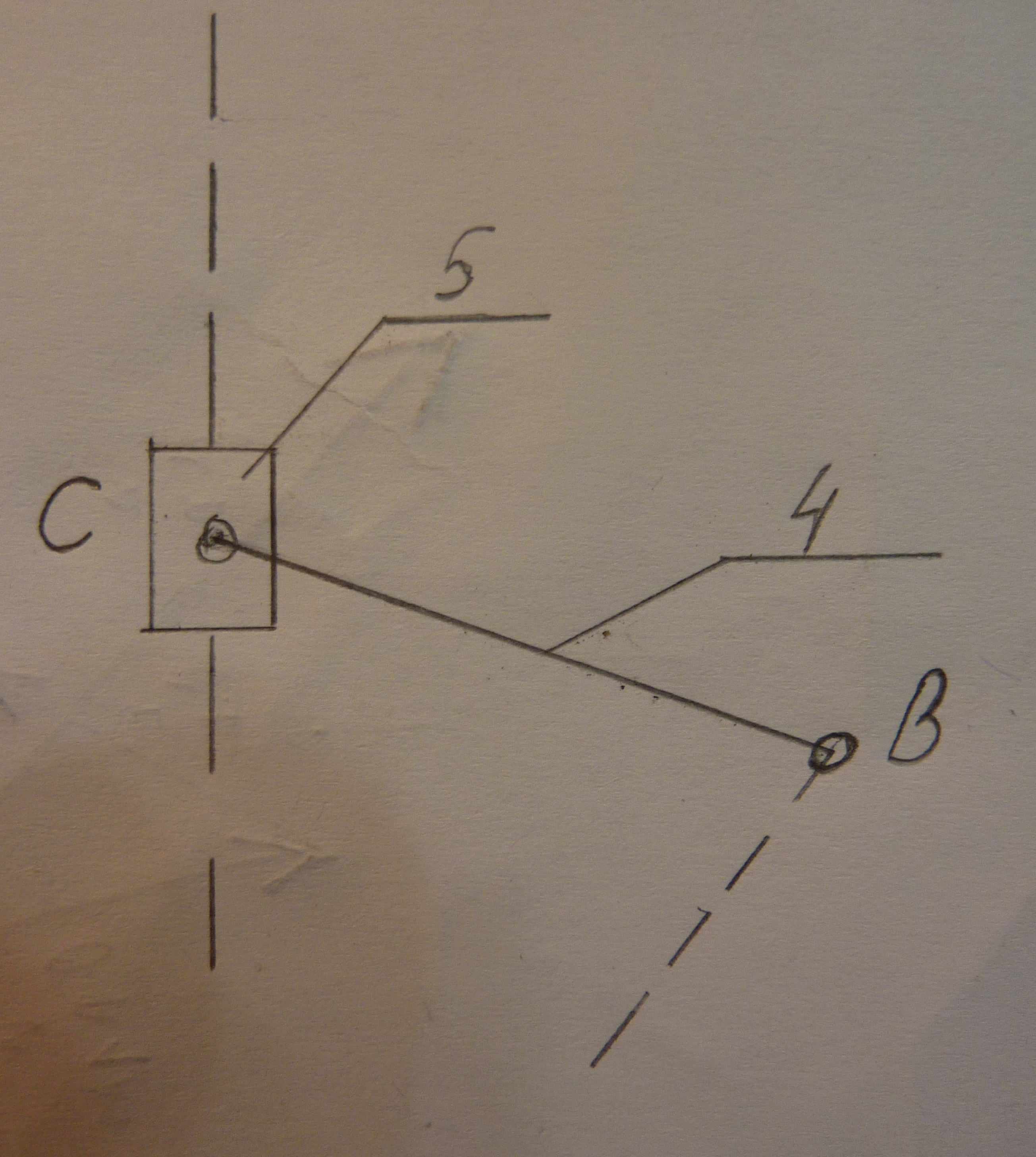
В данном случае, такой группой является
группа, в состав которой входят звенья
4 и 5(рис. 2):
![]()
 Проверим группу по 4 признакам группы
Ассура:
Проверим группу по 4 признакам группы
Ассура:
1)
![]()
2)![]() – чётно
– чётно
3)![]()
Рассмотренная группа 4 – 5 является группой второго класса второго порядка второго вида (II22).
Рис.2. Группа 4-5
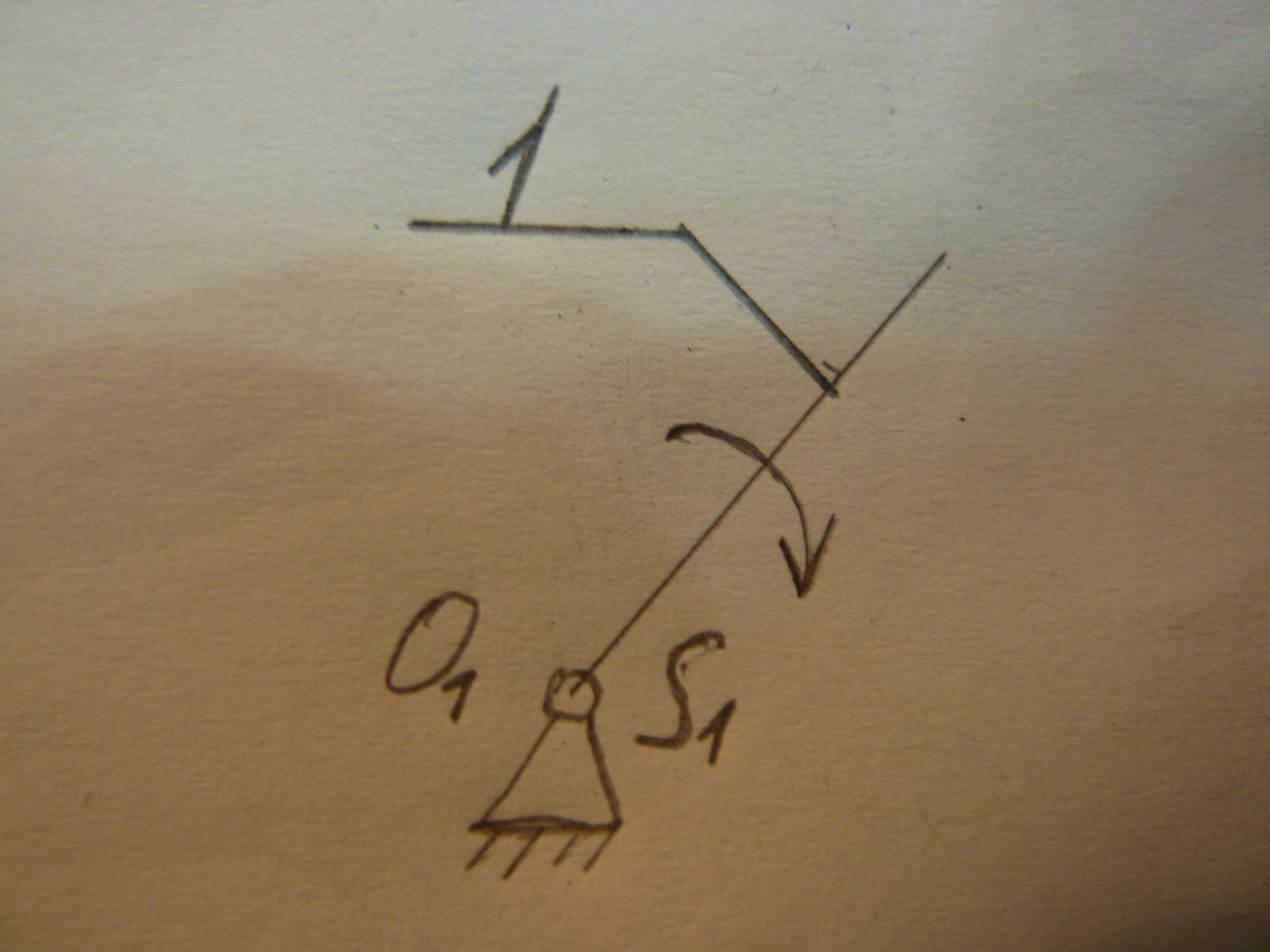
4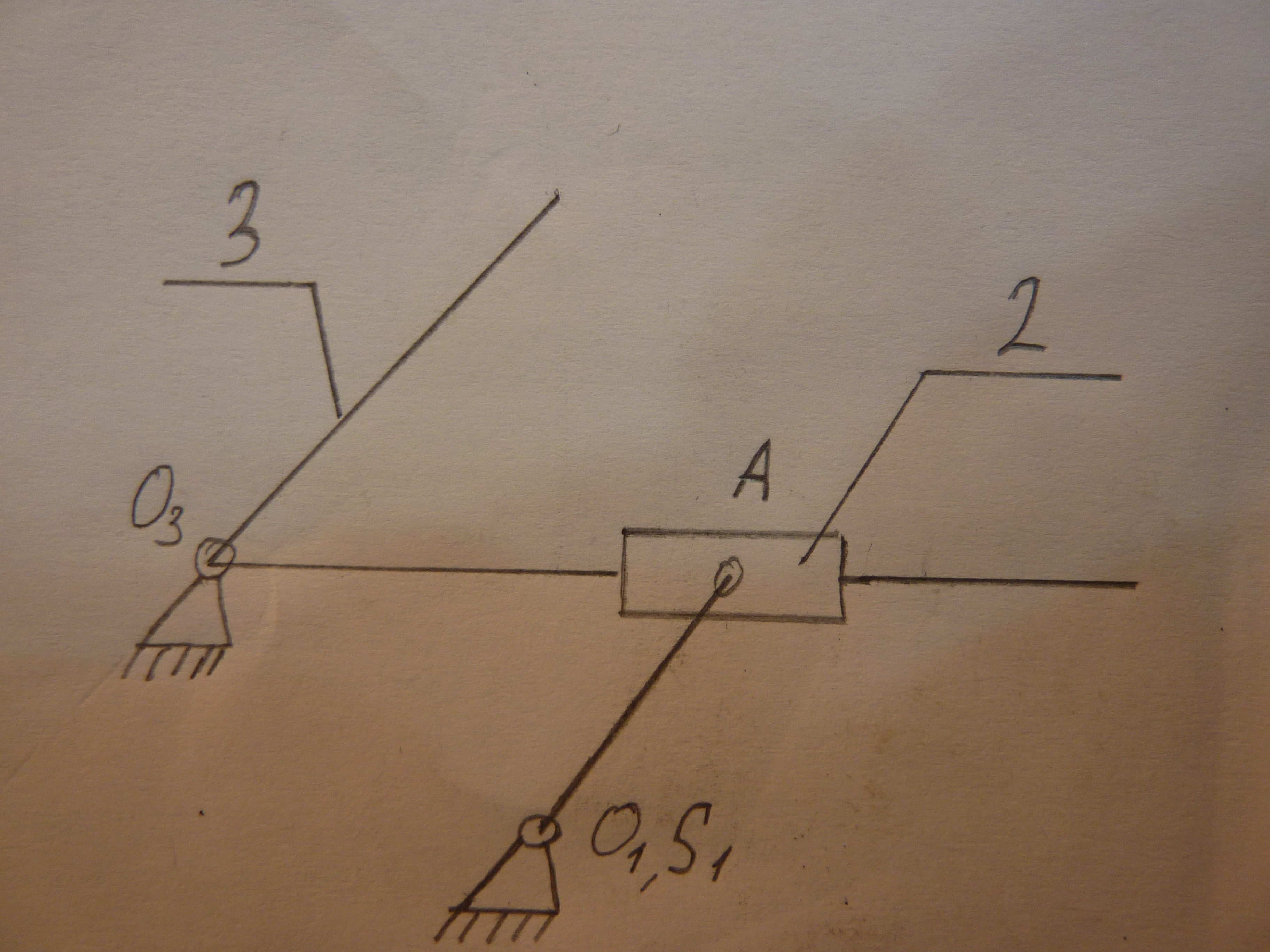 )Рассматривается
подвижность оставшейся части механизма
(рис.3).
)Рассматривается
подвижность оставшейся части механизма
(рис.3).
Рис.3. Оставшаяся часть механизма
О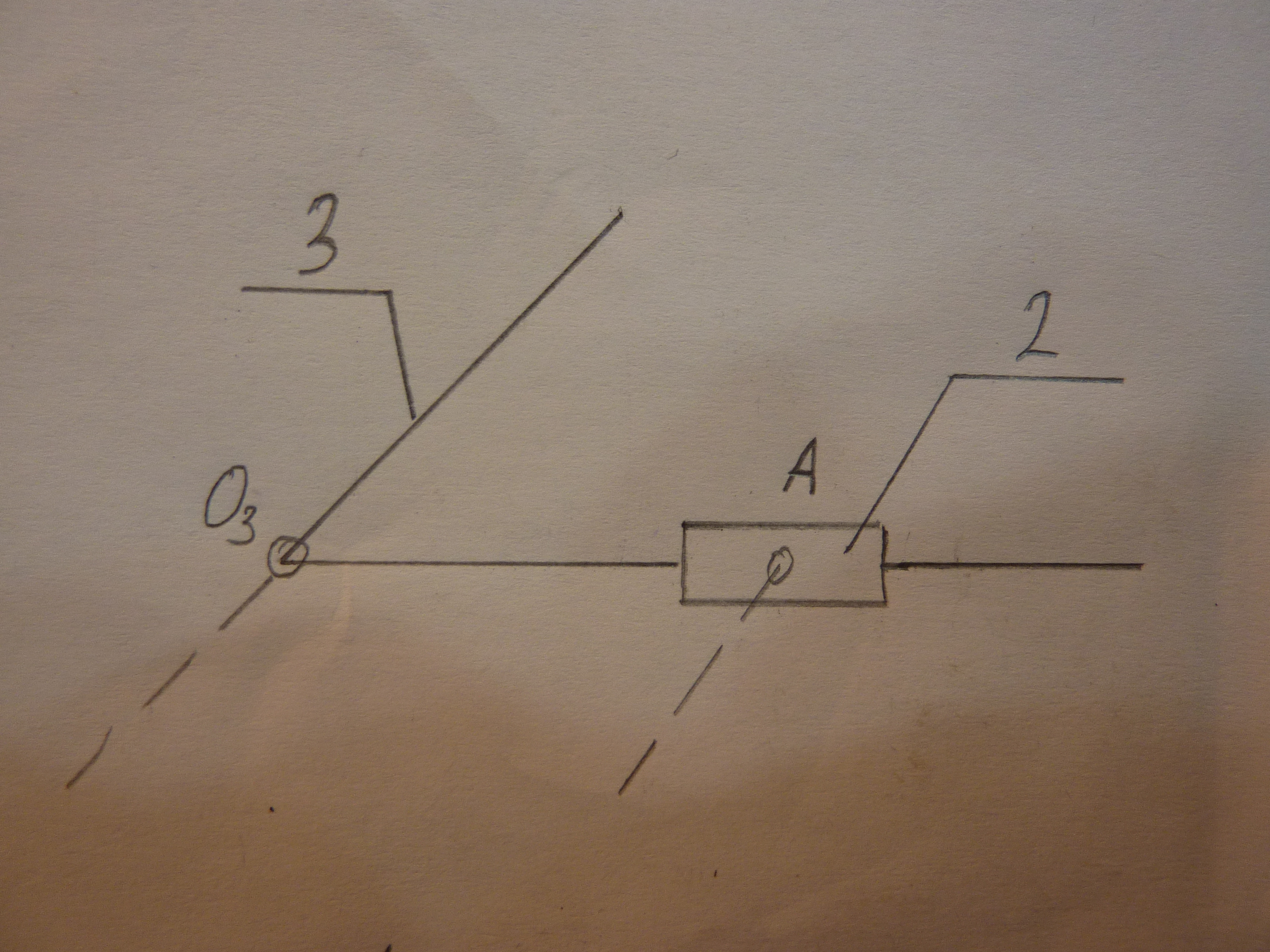 т
оставшейся части механизма отделяем
следующую структурную группу, состоящую
из звеньев 3 и 2 (рис. 4).
т
оставшейся части механизма отделяем
следующую структурную группу, состоящую
из звеньев 3 и 2 (рис. 4).
Рис.4. Группа 2-3
Далее рассматривается подвижность оставшейся части механизма (рис.5)
![]()
Рис.5. Начальный механизм
Оставшаяся часть механизма является начальным механизмом. Данная группа относится к группе первого класса (I).
Таким образом в состав механизма входят
две структурные группы и один начальный
механизм. Наивысший класс группы –
второй, следовательно, механизм относится
ко второму классу. Структурная формула
рассматриваемого механизма имеет вид:
![]()
1.3. Построение плана положений механизма
1.3.1 Нахождение масштаба плана положений
Построим план положений механизма для одного цикла его движения. Под циклом для заданного механизма принимается полный оборот кривошипа.
Для этого сначала определим масштаб плана положений l (м/мм черт.).
![]() ,
,
где -истинная длина кривошипа, м,
![]() -чертежное
изображение длины кривошипа, мм.
-чертежное
изображение длины кривошипа, мм.
Произвольно примем, что чертежное
изображение длины кривошипа
равно
![]() Отсюда получим
Отсюда получим
![]()
В принятом масштабе чертежные изображения остальных звеньев механизма равны:
1.3.2 Нахождение крайних положений механизма
Крайние положения для кулисного механизма определяются взаимно-перпендикулярным положением кривошипа и кулисы. В данном случае крайним положениям соответствуют точки А0 и А13.
1.4. Построение плана скоростей
1.4.1. Определение масштаба плана скоростей
Скорость точки
![]() м/с
м/с
Масштаб плана скоростей
 ,
где
,
где
![]() - изображение VA1
на чертеже, которое условно принимаем
равным 100 мм.
- изображение VA1
на чертеже, которое условно принимаем
равным 100 мм.
Составление векторных уравнений
Так как в данном случае мы рассматриваем кулисный механизм, то мы должны рассмотреть движения:
- кулисного камня совместно с кривошипом;
- кулисного камня совместно с кулисой;
- движение кулисы относительно ее центра вращения.
После рассмотрения получаем следующую систему векторных уравнений, которая позволяет определить полную скорость точки А:
![]()
После нахождения скорости
![]() ,
необходимо будет рассчитать скорость
,
необходимо будет рассчитать скорость
![]() по
правилу подобия:
по
правилу подобия:
Для нахождения полной скорости точки С5, ее движение необходимо рассмотреть отдельно с каждым из звеньев, к которым она принадлежит: камню 4 и ползуну 5. Получим следующую систему векторных уравнений, которая позволяет определить полную скорость точки С5:
![]()
Остальные формулы и вычисления представлены в таблице 5.
Таблица 5
№ положения |
0-12 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
13 |
|
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
1,05 |
|
0 |
0,47 |
0,79 |
0,98 |
1,05 |
0,99 |
1,04 |
0,5 |
0,04 |
0,57 |
1,05 |
0,63 |
0 |
|
1,05 |
0,94 |
0,69 |
0,37 |
0,01 |
0,34 |
0,18 |
0,93 |
1,05 |
0,88 |
0,01 |
0,84 |
1,05 |
|
0 |
0,37 |
0,66 |
0,88 |
0,99 |
0,98 |
1,04 |
0,57 |
0,06 |
1,23 |
3,14 |
1,02 |
0 |
|
0 |
0,58 |
0,82 |
0,92 |
0,95 |
0,93 |
1,03 |
0,6 |
0,07 |
1,28 |
2,99 |
1,44 |
0 |
|
0 |
0,43 |
0,53 |
0,48 |
0,35 |
0,17 |
0,01 |
0,08 |
0,01 |
0,13 |
1,01 |
1 |
0 |
|
0 |
0,43 |
0,7 |
0,87 |
0,96 |
0,95 |
1,04 |
0,59 |
0,06 |
1,25 |
3,02 |
1,14 |
0 |
|
0 |
1,03 |
1,46 |
1,64 |
1,71 |
1,65 |
1,91 |
1,09 |
0,11 |
2,28 |
5,36 |
2,58 |
0 |
|
0 |
0,98 |
1,2 |
1,09 |
0,8 |
0,39 |
0,02 |
0,18 |
0,02 |
0,3 |
2,3 |
2,27 |
0 |
Пример расчёта для 11 положения