

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПЕЧАТИ
Факультет Цифровых систем и технологий
Кафедра Автоматизации полиграфического производства
КУРСОВАЯ РАБОТА
по дисциплине «Теория автоматического управления»
«Исследование устойчивости линейных систем автоматического регулирования»
Вариант № 99 (D)
Выполнила студентка
группы ДЦуи-2-1
Романова А.
Номер зачетной книжки УД 08012
Проверил преподаватель:
Винокурова О.А.
Допущено к защите
Дата защиты
Результат защиты
Подпись преподавателя
Москва 2010
Содержание
Функциональная схема системы управления и описание принципа ее работы……………………………………………………………………………………...4
Структурная схема системы управления, определение передаточной функции исходной замкнутой системы……………………………………………………….7
Оценка устойчивости САУ………………………………………………………….8
Расчет и построение асимптотических частотных характеристик и обоснование неустойчивости системы…………………………………………………………...13
Коррекция (структурная) системы управления по требуемым показателям качества, определение передаточной функции корректирующей системы…………15
Определение передаточной функции скорректированной системы управления……………………………………………………………………………………16
Оценка запасов устойчивости скорректированной системы управления по ЛАЧХ и ЛФЧХ……………………………………………………………………...16
Оценка устойчивости скорректированной системы управления……………….18
Расчет коэффициентов ошибок скорректированной системы управления и построение статической ошибки……………………………………………………..21
Расчет и построение весовой и переходной характеристик скорректированной САУ и оценка прямых показателей качества системы…………………………...23
Выводы о качестве регулирования в скорректированной системе управления................................................................................................................................24
Список литературы…………………………………………………………………26
1. Функциональная схема системы управления и описание принципа ее работы.

Неизменяемая часть структурной схемы системы управления:
Датчик W1(s),
Исполнительный механизм W2(s),
Объект управления W3(s).
Изменяемая часть структурной схемы системы управления:
УПУ - усилительно-преобразующее устройство реализует алгоритм управления согласно требуемым показателям качества системы управления - запасу устойчивости по амплитуде (в пределах 10-30 дБ) и запасу устойчивости по фазе (в пределах 30-60 град). Изменением передаточной функции УПУ W4(s), т.е. последовательным включением корректирующего звена выполняется коррекция и синтез САУ.
Система управления боковой приводкой красок в многокрасочной ПМ.
Объектом управления в исследуемой системе автоматического управления является бумажное полотно. Объект управления имеет математическое описание W3(s), соответствующее инерционному звену.
Датчиком, регистрирующим сигнал о боковой приводке красок и соответствующем положении бумажного полотна, поступивший с объекта, является фотоэлемент: излучатель с приемником. Его математическая модель может быть представлена инерционным звеном W1(s).
Исполнительным устройством, непосредственно выполняющим управление положением бумажного полотна, является валик с электрическим приводом. Математическая модель исполнительного механизма представляет собой реальное интегрирующее звено (интегрирующее и инерционное) W2(s).
Повышение производительности печатных машин и сокращение брака возможны лишь при автоматическом регулировании совмещения красок.
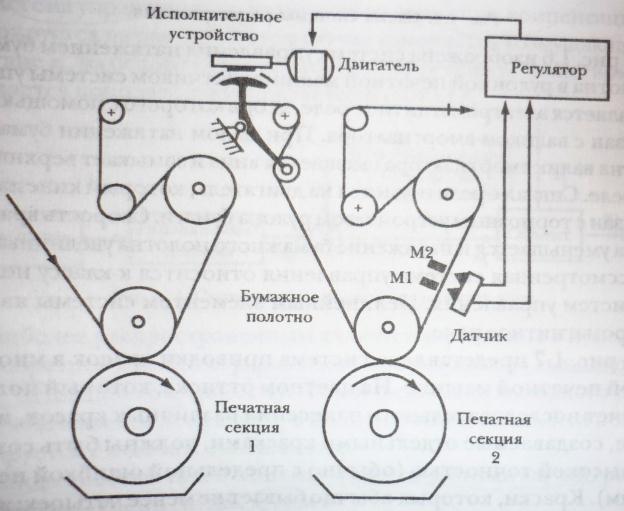 Рис.1.
Система управления приводкой красок
Рис.1.
Система управления приводкой красок
Рассогласование приводки красок измеряется двумя методами.
Первый метод основан на измерении рассогласования между метками М1 и М2 на бумажной ленте (рис.1) с помощью фотоголовки ФГ. В этом случае метки печатаются в каждой печатной секции ПС1 и ПС2 вместе с оттисками соответствующих красок. Метки печатаются на участках ленты, подлежащих обрезке, или на местах будущих сгибов.
Фотоголовка для просматривания меток на бумажной ленте состоит из осветительной лампы, оптической системы, двух фотоэлементов и усилителя. С помощью оптической системы свет от лампы, разделённый на два тонких луча, направляется на бумажную ленту в зону прохождения двух контролируемых меток. Отражённые от бумажной ленты лучи поступают на фотоэлементы соответствующих меток. Если контролируемые метки проходят под фотоголовкой одновременно, то импульсы, вырабатываемые фотоэлементами, возникают одновременно и компенсируют друг друга. Это свидетельствует о том, что приводка красок не нарушена. Если же произойдёт смещение одной метки относительно другой, импульсы от фотоэлементов поступят в различное время. Промежуток времени между возникновением импульсов в фотоэлементах соответствует величине рассогласования и определяет величину регулирующего воздействия.
Второй метод основан на сопоставлении сигналов, поступающих от метки на бумажной ленте и импульсного датчика формного цилиндра. При этом методе контроля на бумажной ленте печатается лишь одна метка.
Фотоголовка состоит из осветительной лампы, одного фотоэлемента (так как просматривается лишь одна метка) и усилителя. Фотоголовка вырабатывает импульс, соответствующий положению метки на бумажной ленте. Второй импульс вырабатывается датчиком импульсов формного цилиндра, обычно представляющим собой вращающийся диск, жёстко связанный с валом формного цилиндра. На диске имеется вырез, который в момент прохождения мимо катушки с сердечником возбуждает в ней электрический импульс. Если импульсы от метки на бумажной ленте и от датчика формного цилиндра поступают в вычислительное устройство одновременно, то они взаимно компенсируются. При нарушении приводки импульсы поступают в вычислительное устройство в разное время. Интервал времени между импульсами соответствует величине рассогласования приводки.
Основное движение формный цилиндр получает от главного вала машины через механический дифференциал. При нарушении приводки регулятор вырабатывает управляющий сигнал, который заставляет червяк вращаться в ту или иную сторону в зависимости от знака рассогласования. При движении червяка по часовой стрелке червячное колесо вместе с корпусом дифференциала вращается в направлении вращения главного вала. В этом случае формный цилиндр смещается на некоторый угол против основного движения. Движение червяка против часовой стрелки вызывает смещение формного цилиндра в направлении основного движения, показанного на рисунке стрелкой.
Несовмещение красок при печати на многокрасочных машинах не должно превышать 0,1 мм. Однако в переходных режимах, например при изменении скорости работы машины, смене рулонов, бывают значительно большие отклонения в приводке красок.
Печатник в процессе ручного управления машиной отбраковывает 30-50 оттисков до склейки и 40-50 оттисков после неё из-за несовмещения красок. Сокращение числа таких оттисков достигается с помощью систем автоматического контроля и регулирования совмещения красок.