

Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Магнитогорский государственный технический университет им. Г.И. Носова»
Кафедра промышленной кибернетики и
систем управления
ИССЛЕДОВАНИЕ ПРОПОРЦИОНАЛЬНОГО РЕГУЛЯТОРА
Методические указания к лабораторной работе
по дисциплине «Введение в специальность»
для студентов специальности 220301
и направления 220200
Магнитогорск
2011
Составитель Ю.С. Артамонов
Исследование пропорционального регулятора: Методические указания к лабораторной работе по дисциплине «Введение в специальность» для студентов специальности 220301 и направления 220200. Магнитогорск: МГТУ, 2011. 13 с.
В инструкции приводятся основные теоретические сведения о принципах работы автоматического регулятора, реализующего закон пропорционального регулирования, построены графики, иллюстрирующие работу регулятора, показано, что установив-шееся значение регулируемого параметра поддерживается с ошибкой, приведена подробная последовательность действий при экспериментальном исследовании регулятора.
Рецензент: канд. техн. наук, доц. Леванов В.В.
© Ю.С. Артамонов, 2011
Исследование пропорционального регулятора
Цель работы: изучить функциональную структуру системы автоматического регулирования и функции её элементов; изучить основные параметры, характеризующие систему автоматического регулирования и свойства объекта управления; экспериментально получить статические и динамические характеристики объекта управления; научиться экспериментально определять коэффициент передачи П-регулятора; исследовать, как влияет коэффициент передачи регулятора на качество переходного процесса.
Приборы и материалы: специализированная лабораторная установка с П-регулятором температуры термостата.
1. Функциональная структура системы автоматического регулирования
У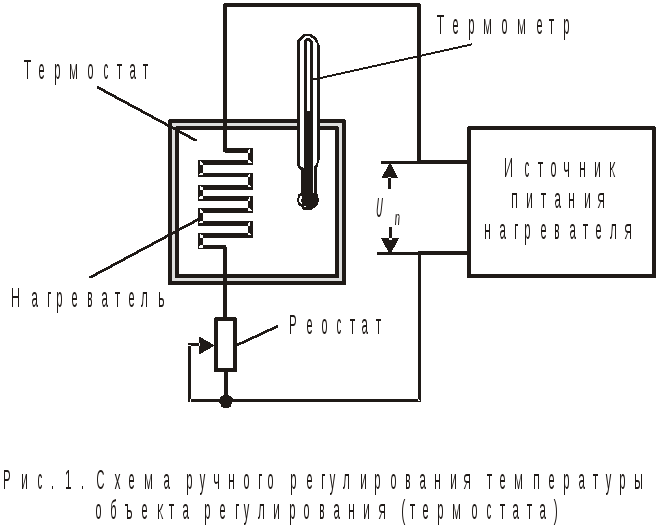 стройство,автоматическиподдерживающее(без непосредственного участия человека)
в течение определённого промежутка
времени с требуемой точностьюзаданное
значениерегулируемого параметра,
называетсяавтоматическим регулятором.
Регулирование, таким образом, является
частным случаем более общего процесса
– процесса управления.Пропорциональным
регулятором (П-регулятором)называется
автоматическое устройство, в котором
реализованпринцип регулирования по
отклонению. На рис. 1 в качестве примера
реализации этого принципа изображена
схема ручного регули-рования температуры
термостата с электри-ческим нагревателем
сопротивления. Для этого надо выполнять
следующие операции.
стройство,автоматическиподдерживающее(без непосредственного участия человека)
в течение определённого промежутка
времени с требуемой точностьюзаданное
значениерегулируемого параметра,
называетсяавтоматическим регулятором.
Регулирование, таким образом, является
частным случаем более общего процесса
– процесса управления.Пропорциональным
регулятором (П-регулятором)называется
автоматическое устройство, в котором
реализованпринцип регулирования по
отклонению. На рис. 1 в качестве примера
реализации этого принципа изображена
схема ручного регули-рования температуры
термостата с электри-ческим нагревателем
сопротивления. Для этого надо выполнять
следующие операции.
1. Измерять температуру термо-метром.
2. Сравнивать текущие показания термометра с заданным значением температуры и вычислять величину отклонения и его знак.
3. При наличии отклонения показаний термометра от заданного значения температуры производить в соответствующем направлении перемещение движка реостата, а именно, для увеличения температуры уменьшать сопротивление реостата, а для уменьшения – увеличивать.
Все эти функции выполняются в системе автоматического регулирования, изображённой на рис. 2.
В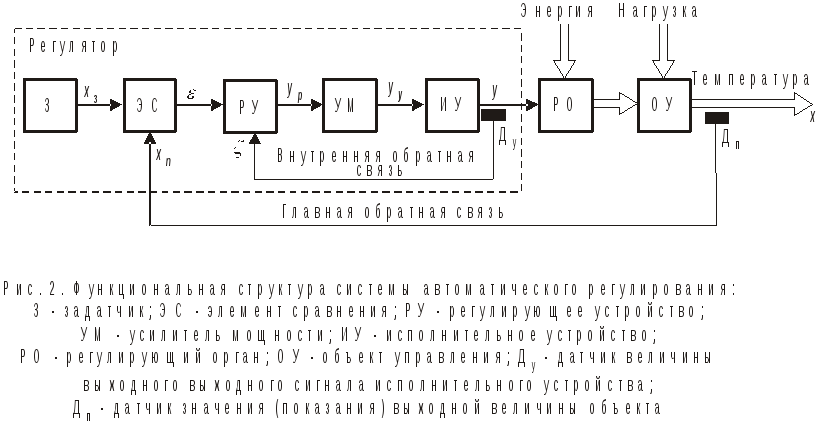 автоматике основные части системы
автоматического управления и величины
имеют названия.
автоматике основные части системы
автоматического управления и величины
имеют названия.
Одним из главных элементов системы является объектуправления ОУ,в котором происходит преобразование энергии или вещества. Это может быть, например, электрический генератор, котёл, печь. В данной работе объектом управления является небольшой термостат.
Состояние объекта как физической системы, а также состояние потока энергии или вещества на выходе объекта характеризуются одной или несколькими физическими величинами, изменяющимися во времени. Эти величины в общем случае называются параметрами управления, а в применении к регулятору –регулируемыми параметрами. В рассматриваемом термостате такой величиной является температура.
Необходимость регулирования физических величин в объекте вызывается внешними возмущениями или изменением нагрузки. Внешнее воздействие на регулируемый объект или на всю систему регулирования, вызывающее возникновение в ней переходных процессов, называется возмущением. Расход для производственных целей вещества или энергии в объекте называетсянагрузкой. Подпереходным процессомпонимается любое неустановившееся состояние системы регулирования, во время которого изменяется значение регулируемого параметра.
Для построения системы управления объектом управления его выходную переменную хизмеряют с помощью преобразователя –датчикаДх, который вырабатывает сигналхп, функционально связанный с параметром управлениях. Во многих случаях эта связь есть прямая пропорциональность. Для получения необходимого закона регулирования используют внутреннюю обратную связь по величине управляющего воздействияy, осуществляемую через преобразователь –датчикДy– величиныyв величину.
Изменение подачи энергии или сырья в объект управления производят с помощью регулирующего органа РО, в качестве которого используют тиристоры, транзисторы, вентили, задвижки, клапаны, дозаторы и т.п. Для создания механических перемещений в регулирующем органе применяютисполнительные устройства ИУ– электрические, гидравли-ческие, пневматические исполнительные механизмы, электромагниты и пр. На исполнительное устройство воздействуют командные сигналы, поступающие изусилителя мощности УМ.
Регулирующее усторйство РУв соответствии с заложенным в него алгоритмом преобразуетсигнал ошибки и вырабатываетуправляющий сигнал yр.
Сигнал ошибки вырабатывается вэлементе сравнения ЭСв результате вычитания из сигналазадатчика З xз сигналаxп, поступающего от датчикаДxпо каналу главной обратной связи.