

8.6. Регулирование положения (пути)
Для электроприводов механизмов, отрабатывающих задаваемые перемещения (линейные или угловые), основным является контур регулирования положения (пути). Объект регулирования контура положения содержит, кроме подчиненного оптимизированного контура скорости, интегрирующее звено и датчик положения. Структурная схема контура регулирования положения показана на рис. 8.26.
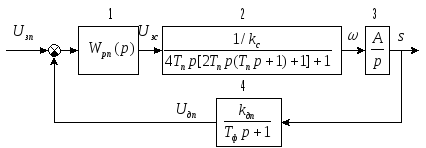
Рис 8.26. Структурная схема контура регулирования положения: 1 – регулятор положения; 2- замкнутый оптимизированный контур скорости; 3 –механизм; 4 – датчик положения
Если отрабатываемые перемещения настолько малы, что ток якоря двигателя не достигает максимально допустимой величины (тока отсечки), то при линейной характеристике регулятора положения систему можно рассматривать как линейную. При больших перемещениях, когда электропривод работает с ограничением тока, но не выходит на максимально допустимую скорость, отработка задаваемого перемещения осуществляется по треугольному графику скорости. Еще большие перемещения отрабатываются по трапециидальному графику. Во втором и третьем случаях регулятор положения с линейной характеристикой не может обеспечить оптимальной отработки различных перемещений.
Разгон
привода при отработке перемещения
заканчивается, когда величина
рассогласования по пути
![]() становится равной
становится равной
|
|
(8.46) |
При этом скорость
|
|
(8.47) |
где
![]() - максимальный момент двигателя,
определяемый током ограничения (отсечки);
- максимальный момент двигателя,
определяемый током ограничения (отсечки);
![]() -
статический момент (сопротивления);
-
статический момент (сопротивления);
![]() -
коэффициент, связывающий угол поворота
двигателя с величиной перемещения
механизма.
-
коэффициент, связывающий угол поворота
двигателя с величиной перемещения
механизма.
Подставляя (8.47) в (8.46), получаем
|
|
(8.48) |
 .
.
Если
![]() выбран таким, что реализуется оптимальное
торможение (торможение с максимальным
моментом двигателя), то при торможении
скорость двигателя
выбран таким, что реализуется оптимальное
торможение (торможение с максимальным
моментом двигателя), то при торможении
скорость двигателя
|
|
(8.49) |
где
![]() - путь торможения.
- путь торможения.
Решая совместно (8.47) и (8.49), найдем значение пути, с которого начинается процесс торможения
|
|
(8.50) |
Подставляя (8.50) в (8.49), получаем зависимость между необходимым для оптимальной настройки коэффициентом усиления регулятора положения и величиной задаваемого перемещения
|
|
(8.51) |
Если
регулятор настроен оптимально для
определенной величины перемещения
![]() (рис.8.27, кривые 2), то меньшие перемещения
будут отрабатываться с «дотягиванием»
(кривые 1), большие с перерегулированием
(кривые 3).
(рис.8.27, кривые 2), то меньшие перемещения
будут отрабатываться с «дотягиванием»
(кривые 1), большие с перерегулированием
(кривые 3).
Позиционные системы это, как правило, системы с ограничением ряда параметров и, следовательно, существенно нелинейные. В этих системах налагаются ограничения по следующим основным параметрам:
1) скорости электродвигателя. Обычно за максимальную скорость привода принимают основную (номинальную) скорость исполнительного двигателя. Ослабление поля двигателя может быть применено в режиме отработки больших перемещений без позиционирования;
2)
току электродвигателя, который обычно
ограничивается на уровне
![]() ;
;
3) ускорению. Если механическая часть привода не допускает ускорений, соответствующего максимальному динамическому моменту, то снижают уставку токоограничения;

Рис.
8.27. Кривые отработки задаваемых
перемещений для контура с линейной
характеристикой регулятора положения
при
![]()
4) пути. Это ограничение связано с недопустимостью перерегулирования по пути из-за технологических особенностей работы механизма или вследствие повышенного износа механического оборудования при наличии люфтов в механических передачах.
В зависимости от требований, предъявляемых к электроприводу, система может быть выполнена с линейным и нелинейным регулятором положения. Нелинейный регулятор, коэффициент которого обратно пропорционален корню квадратному от величины задания на перемещение, обеспечивает существенное меньшее время отработки, как при малых, так и при больших рассогласованиях.