

7.6. Устойчивость автоматических систем регулирования
Под устойчивостью системы понимается ее способность возвращаться к состоянию установившегося равновесия после устранения возмущения, нарушившего указанное равновесие. Любая практическая АСР должна быть устойчивой. Поскольку реальные АСР являются нелинейными, то естественно возникает вопрос, насколько мы правомочны судить об устойчивости реальных АСР по их линейной математической модели. Ответ на этот вопрос дан в работах А. М. Ляпунова:
1) если линейная АСР устойчива, то устойчива и реальная АСР; при этом никакие отброшенные при линеаризации члены не могут изменить ее устойчивости;
2) если линейная АСР неустойчива, то неустойчива и реальная АСР, при этом никакие отброшенные при линеаризации члены не могут изменить ее устойчивости;
3) если линейная АСР находится на границе устойчивости, то судить по ней об устойчивости реальной АСР нельзя; необходим анализ отброшенных при линеаризации членов.
При рассмотрении вопросов устойчивости необходимо различать устойчивость в малом (т. е. устойчивость при определенных ограничениях, накладываемых на значение возмущений) и устойчивость в большом (т. е. устойчивость при любых значениях возмущений). Линейная АСР, если она устойчива, то она устойчива при любых возмущениях, поэтому об устойчивости линейной АСР можно судить по устойчивости ее свободного движения. Уравнение свободного движения АСР имеет вид:
|
|
(7.33) |
Решение уравнения (7.33) определяется выражением
|
|
(7.34) |
где
![]() —- некоторые постоянные, определяемые
начальными условиями;
—- некоторые постоянные, определяемые
начальными условиями;![]() — корни характеристического уравнения
— корни характеристического уравнения
|
|
(7.35) |
Таким образом, устойчивость линейных АСР определяется корнями характеристического уравнения (7.35).
А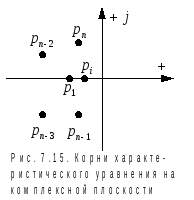 налитическая
формулировка условий устойчивости
линейной АСР дана А. М. Ляпуновым в
следующем виде:чтобы
линейная АСР была устойчивой, необходимо
и достаточно, чтобы все вещественные
корни характеристического уравнения
(7.35) были отрицательны, а комплексные
корни имели отрицательную вещественную
часть, т. е. все корни располагались в
левой полуплоскости плоскости корней
налитическая
формулировка условий устойчивости
линейной АСР дана А. М. Ляпуновым в
следующем виде:чтобы
линейная АСР была устойчивой, необходимо
и достаточно, чтобы все вещественные
корни характеристического уравнения
(7.35) были отрицательны, а комплексные
корни имели отрицательную вещественную
часть, т. е. все корни располагались в
левой полуплоскости плоскости корней
![]() (рис. 7.15).
(рис. 7.15).
Для уравнений высоких степеней определение корней характеристического уравнения связано с определенными трудностями, поэтому разработан ряд правил (критериев), позволяющих определять устойчивость АСР, не решая характеристического уравнения:
- критерий Рауса;
- критерий Гурвица;
- критерий Михайлова;
- критерий Найквиста и др.
7.7. Качество регулирования. Показатели качества
Любая
АСР, кроме устойчивости, должна
обеспечивать определенные качественные
показатели процесса регулирования.
Качество процесса регулирования АСР
обычно оценивают по переходной функции
![]() по отношению к единичному ступенчатому
воздействию.
по отношению к единичному ступенчатому
воздействию.
Основными показателями качества являются: время регулирования, перерегулирование, колебательность и установившаяся ошибка.
На
примере переходной функции
![]() ,
представленной на рис. 7.16, рассмотрим
основные показатели качества регулирования.
,
представленной на рис. 7.16, рассмотрим
основные показатели качества регулирования.
Время
регулирования.
Временем регулирования
![]() называется время, в течение которого,
начиная с момента приложения воздействия
на систему, отклонения значений
регулируемой величины
называется время, в течение которого,
начиная с момента приложения воздействия
на систему, отклонения значений
регулируемой величины![]() от ее установившегося значения
от ее установившегося значения![]() будут больше наперед заданного значения
будут больше наперед заданного значения![]() .
Таким образом, время регулирования
определяет длительность (быстродействие)
переходного процесса.
.
Таким образом, время регулирования
определяет длительность (быстродействие)
переходного процесса.
Перерегулирование.
Перерегулированием называется
максимальное отклонение
![]() значения регулируемой величины от
установившегося значения, выраженное
в процентах от
значения регулируемой величины от
установившегося значения, выраженное
в процентах от![]() .
Абсолютная величина
.
Абсолютная величина![]() определяется из переходной характеристики
(рис. 7.16)
определяется из переходной характеристики
(рис. 7.16)![]()
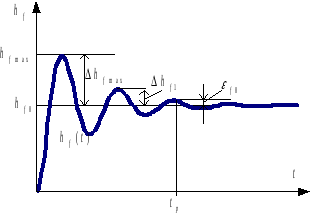
Рис. 7.16. Показатели качества переходного процесса
Соответственно перерегулирование, %, будет равно:
|
|
(7.36) |
Колебательность
системы характеризуется числом колебаний
регулируемой величины за время
регулирования
![]() .
Если за это время переходный процесс в
системе совершает число колебаний
меньше заданного по условиям технологии,
то считается, что система имеет требуемое
качество регулирования в части ее
колебательности.
.
Если за это время переходный процесс в
системе совершает число колебаний
меньше заданного по условиям технологии,
то считается, что система имеет требуемое
качество регулирования в части ее
колебательности.
Установившаяся,
ошибка. В общем
случае установившаяся ошибка или
точность регулирования определяется
как разность между установившимся
значением регулируемой величины
![]() после окончания переходного процесса
и ее заданным значением
после окончания переходного процесса
и ее заданным значением![]() :
:
|
|
(7.37) |
Показатели качества системы регулирования можно определить непосредственно из графика переходного процесса.
График переходного процесса можно получить экспериментально или для построения этого графика необходимо решить дифференциальное уравнение системы.
Численное решение дифференциального уравнения является трудоемкой задачей, а проведение эксперимента связано с трудностями и по условиям технологии не всегда возможно.
В связи с этим кроме определения показателей качества регулирования по кривой переходного процесса в инженерной практике находят широкое применение косвенные оценки качества.
Косвенными оценками называются некоторые величины, в той или иной мере характеризующие отдельные особенности переходного процесса. Эти величины можно определить сравнительно просто без выполнения трудоемкой работы по построению графика переходного процесса.
Наиболее часто в инженерной практике находит косвенный метод по логарифмическим частотным характеристикам разомкнутой системы.
Оценка качества по ЛАЧХ разомкнутой системы производится путем сопоставления ее фактической ЛАЧХ с так называемой желаемой ЛАЧХ разомкнутой системы, при которой обеспечиваются переходные процессы в системе, близкие к оптимальным.
При построении желаемой ЛАЧХ системы руководствуются следующими соображениями:
1) участок низких частот ЛАЧХ определяет допустимую установившуюся ошибку в системе, а следовательно, ее астатизм, коэффициент передачи в разомкнутом состоянии;
2) участок средних частот определяет запас устойчивости системы (на этом участке расположена частота среза ЛАЧХ);
3) высокочастотный участок мало влияет на характер переходного процесса в системе.
Если
система статическая, то на участке
низких частот ЛАЧХ должна идти параллельно
оси абсцисс и иметь ординату
![]() .
.
Коэффициент
передачи разомкнутой системы
![]() определяется с учетом допустимой
установившейся ошибки регулирования
при подаче на вход системы единичного
ступенчатого воздействия. Если система
должна иметь астатизм
определяется с учетом допустимой
установившейся ошибки регулирования
при подаче на вход системы единичного
ступенчатого воздействия. Если система
должна иметь астатизм![]() ,
то на участке низких частот ЛАЧХ должна
иметь наклон -
,
то на участке низких частот ЛАЧХ должна
иметь наклон -![]() .
При
.
При![]() ЛАЧХ должна проходить через точку с
ординатой
ЛАЧХ должна проходить через точку с
ординатой![]() как статической, так и астатической
систем (рис. 7.18, а).
как статической, так и астатической
систем (рис. 7.18, а).
Частота
среза участка средних частот выбирается
с учетом заданных времени регулирования
![]() и перерегулирования
и перерегулирования![]() .
.
Между временем регулирования и частотой среза имеется следующая приближенная зависимость:
|
|
(7.41) |
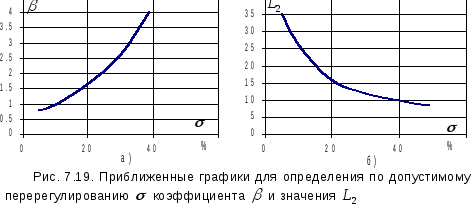
где
![]() — коэффициент, зависящий от перерегулирования
— коэффициент, зависящий от перерегулирования![]() (рис. 7.19, а). Таким образом, определив из
рис. 7.19, а коэффициент
(рис. 7.19, а). Таким образом, определив из
рис. 7.19, а коэффициент![]() ,
исходя из заданного перерегулирования
,
исходя из заданного перерегулирования![]() при заданном времени регулирования
при заданном времени регулирования![]() определяем частоту среза желаемой ЛАЧХ:
определяем частоту среза желаемой ЛАЧХ:
|
|
(7.42) |
Система
имеет наиболее благоприятный переходный
процесс при наклоне ЛАЧХ
![]() в интервале частот
в интервале частот![]() .
.![]()
Имеется
несколько рекомендаций по выбору
сопрягающих частот
![]() и
и![]() .
Интервалы частот
.
Интервалы частот![]() и
и![]() рекомендуют выбирать равными
рекомендуют выбирать равными![]() .
Эти интервалы частот также можно выбирать
по значениям ЛАЧХ в начале и конце
интервала частот
.
Эти интервалы частот также можно выбирать
по значениям ЛАЧХ в начале и конце
интервала частот![]() .
Значение
.
Значение![]() ЛАЧХ в начале этого интервала
ЛАЧХ в начале этого интервала![]() выбирается из условия, чтобы значение
ЛФЧХ (рис. 7.18, б) при этой частоте было
не менее 40° (
выбирается из условия, чтобы значение
ЛФЧХ (рис. 7.18, б) при этой частоте было
не менее 40° (![]() ).
).
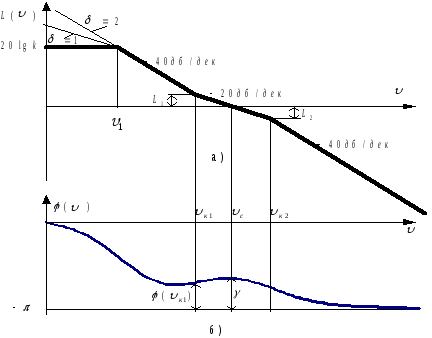
Рис. 7.18. Примерные желаемые ЛАЧХ (а) ЛЧФХ (б) разомкнутой системы
Требуемый
запас устойчивости системы по модулю
![]() в децибелах в .зависимости от допустимого
перерегулирования в системе выбирается
по графику на рис. 7.19, б.
в децибелах в .зависимости от допустимого
перерегулирования в системе выбирается
по графику на рис. 7.19, б.
В
общем случае при выборе
![]() и
и![]() необходимо руководствоваться тем, что
чем больше интервал частот
необходимо руководствоваться тем, что
чем больше интервал частот![]() ,
тем лучше будет переходный процесс.
Однако практическая реализация желаемой
частотной характеристики при этом
усложняется. В связи с этим нет
необходимости излишне увеличивать этот
интервал частот. Так как участок высоких
частот существенного влияния на качество
регулирования не оказывает, то в этом
интервале частот допустимо совпадение
наклонов желаемой ЛАЧХ с ЛАЧХ фактической.
,
тем лучше будет переходный процесс.
Однако практическая реализация желаемой
частотной характеристики при этом
усложняется. В связи с этим нет
необходимости излишне увеличивать этот
интервал частот. Так как участок высоких
частот существенного влияния на качество
регулирования не оказывает, то в этом
интервале частот допустимо совпадение
наклонов желаемой ЛАЧХ с ЛАЧХ фактической.
На
рис. 7.20. представлена переходная
характеристика
![]() замкнутой
системы, ЛАЧХ и ЛФЧХ которой в разомкнутом
виде представлена на рис. 7.18, при
скачкообразном управляющем воздействии.
замкнутой
системы, ЛАЧХ и ЛФЧХ которой в разомкнутом
виде представлена на рис. 7.18, при
скачкообразном управляющем воздействии.
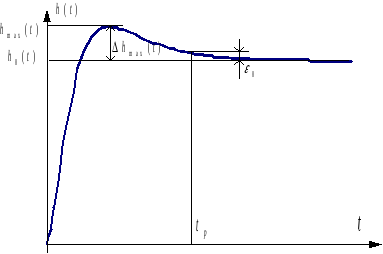
Рис.7.20. Переходная характеристика замкнутой системы