

35.Среднестатистические погрешности основных навигационных параметров (частная, повторяющаяся, полная)



36. Погрешность функции измеренных величин. Прогнозирование влияния систематической погрешности при омс по 2лп.
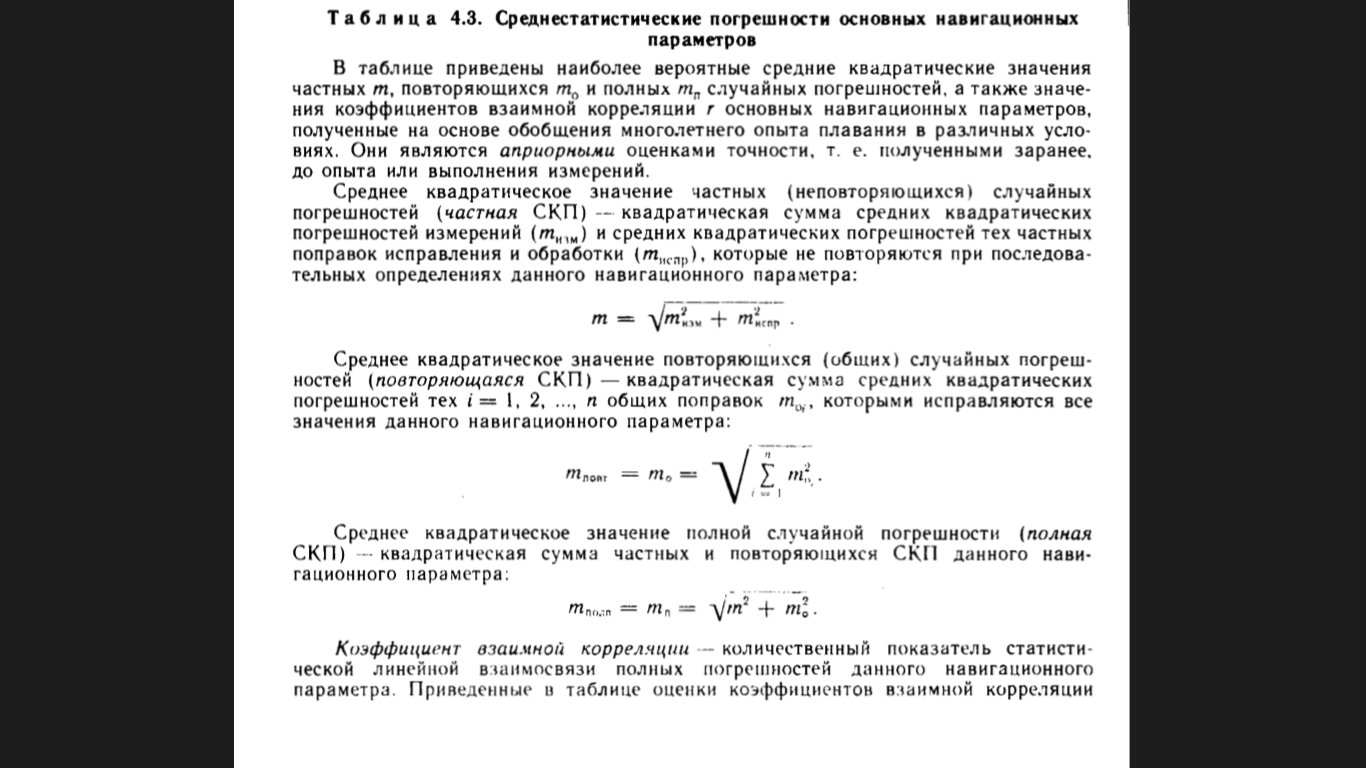
Основная теорема теории погрешностей В геодезической практике мы, как правило, имеем дело не с непосредственно измеренными величинами, а с их функциями, т.е. косвенными измерениями. Так, уклон линии определяют как отношение непосредственно измеренных превышения и длины линии. Длину линии, недоступной для непосредственного измерения, находят из решения треугольника, где непосредственно измерены базисная сторона и горизонтальные углы. Площадь земельного участка прямоугольной формы вычисляют как произведение непосредственно измеренных длины и ширины участка. Перечень подобных примеров можно продолжить. Отсюда возникает задача оценки точности функции измеренных величин по известным стандартам ? или средним квадратическим погрешностям m непосредственно измеренных аргументов
Предельная погрешность
С помощью закона Гаусса можно показать, что при достаточно большом числе измерений случайная погрешность измерения может быть:
Больше средней квадратической примерно в 32 случаях из 100;
Больше удвоенной средней квадратической только в 5 случаях из 100;
Больше утроенной средней квадратической лишь в 3 случаях из 100.
Следовательно, маловероятно, чтобы случайная погрешность измерения получилась больше утроенной средней квадратической. Поэтому утроенную среднюю квадратическую погрешность считают предельной:
|
|
|
(5) |
Теперь все чаще в геодезии за предельную ошибку принимают не утроенную (формула 5), а удвоенную среднюю квадратическую ошибку с риском ошибиться на 5%.
Если в ряду случайных ошибок встречается ошибка по абсолютному значению больше предельной для данного ряда, то такую ошибку считают грубой.
2.4 Оценка радиальной погрешности омс по 2 лп
1.
Радиальная СКП обсервованного места
судна оценивается по формуле:
М0 = cosecm2 лп1 + m2лп2 = 0,0997 (мили)
где М0 - радиальная СКП обсервованного места судна
2. По отношениям полуосей эллипса погрешностей, заданной и радиальной СКП с помощью табл. 1-в МТ-75 определяем вероятность нахождения судна в круге радиальной СКП P(M0):
e = в/a Мзад = М0 R = Мзад/М0 = М0/М0 = 1
P(M0) = 66,3%
3. С помощью табл. 1-в МТ-75 определяем радиальные погрешности возможного места судна (Mзад) для заданных вероятностей: P(Mзад) = 0,95; P(Mзад) = 0,99:
Для P(Mзад) = 0,95 R = 1,7 Mзад = 0,46 (мили)
Для P(Mзад) = 0,99 R = 2,2 Mзад = 0,6 (мили)
37.Фигура погрешности при оценки точности омс по 2лп.
Во многих случаях определения места при избыточных линиях положения можно выполнить оценку точности обсерваций методом эквивалентных линий положения.
Эквивалентные
линии положения (ЭЛП) - это линии,
проходящие через вероятнейшее место
судна и совпадающие с направлениями
главных осей эллипса погрешностей (см.
рис.). Поскольку погрешности места по
направлению главных осей эллипса
являются экстре-мальными, то экстремальными
являются и веса эквивалентных линий
положения.
СКП первой эквивалентной ЛП минимальна и равна "b". Поэтому вес ЭЛП максимален Ртах, СКП второй эквивалентной ЛП максимальна и равна "а". Поэтому вес ЭЛП минимален Ртin.
Между СКП линий положения и их весами существует определенное соотношение
 .
.
Следовательно, определив веса эквивалентных линий положения можно вычислить и главные полуоси среднего квадратического эллипса:
 ;
;
 .
.
Графоаналитический способ получения элементов эллипса погрешностей при числе линий положения больше двух заключается в следующем:
1. Находится направление i и величина градиента каждой линии положения gi.
2. Вычисляются веса линий положения
![]() погрешность
измерения параметра).
погрешность
измерения параметра).
3. Вычисляется сумма весов эквивалентных линий положения. Она равна сумме весов исходных линий положения:
 .
.
4. Для
расчета разности эквивалентных ЛП q
=
![]() строится квадратичный полигон (полигон
весов линий положения). Для построения
полигона на чистом листе бумаги из
произвольной точкиА
(см.
рис.) под углом
строится квадратичный полигон (полигон
весов линий положения). Для построения
полигона на чистом листе бумаги из
произвольной точкиА
(см.
рис.) под углом
 относительно
меридиана прокладывается вектор, равный
весу р
лп1,
первой
линии положения. Из его конца под углом
22
к меридиану прокладывается вектор,
равный весу рлп2
второй линии положения и т.д.; измеряется
длина замыкающей квадратичного полигона
q.
Она
равна разности весов эквивалентных
линий положения
относительно
меридиана прокладывается вектор, равный
весу р
лп1,
первой
линии положения. Из его конца под углом
22
к меридиану прокладывается вектор,
равный весу рлп2
второй линии положения и т.д.; измеряется
длина замыкающей квадратичного полигона
q.
Она
равна разности весов эквивалентных
линий положения

 .
.
Измеряется угол 2Т, который составляет с меридианом замыкающая квадратичного полигона; его половина, т.е. угол Т, дает направление малой оси эллипса погрешностей.
Из выше написанных уравнений находятся веса эквивалентных линий положения:

7. Вычисляются величины полуосей среднего квадратического эллипса погрешностей обсервованного места
 ;
;
 .
.
Величина q может быть вычислена по формуле
 .
.
Направление малой оси эллипса погрешностей вычисляется по формуле
 .
.