

Задача д-7. Принцип Даламбера для материальной системы
а) Исходные данные.Расчетная схемы для отдельных вариантов приведена на рис.7.1, исходные данные для всех вариантов – в табл.7.1.
Таблица 7.1.
|
Величины |
Размерность |
Значение величин для вариантов | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | ||
|
АВ |
м |
2 |
3 |
3 |
4 |
2 |
3 |
2 |
3 |
4 |
2 |
|
Длина 1 части
|
м |
2 |
3 |
2 |
3 |
2,5 |
3 |
2 |
2 |
3 |
1 |
|
Длина 2 части
|
м |
3 |
3 |
2 |
4 |
2,5 |
3 |
2 |
3 |
4 |
2 |
|
Угол |
град |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
|
Угол |
град |
60 |
45 |
30 |
60 |
45 |
30 |
60 |
45 |
30 |
60 |
|
Угловая скорость |
с-1 |
2 |
3 |
4 |
5 |
6 |
5 |
4 |
3 |
2 |
3 |
|
n |
|
0,2 |
0,3 |
0,4 |
0,5 |
0,4 |
0,3 |
0,2 |
0,1 |
0,3 |
0,2 |
|
Масса стержня
|
кг |
10 |
10 |
7 |
7,5 |
12,5 |
10 |
10 |
7 |
7,5 |
5 |
|
Масса стержня
|
кг |
15 |
10 |
10 |
12,5 |
10 |
10 |
10 |
10 |
10 |
10 |
Примечание:
1. Номер схемы на рис.7.1 выбирают по последней цифре шифра, данные в табл.7.1 по предпоследней;
2. Углы и даны только для тех схем, в которых они показаны.
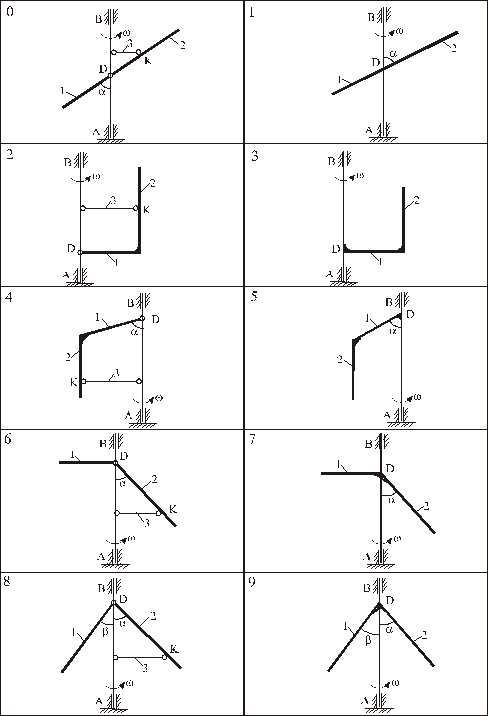
Рис.7.1.
б) Условие задачи:
К
вертикальному валу АВ, вращающемуся
вокруг своей оси с угловой скоростью
![]() ,
шарнирно (или жестко) прикреплены в
точкеDстержни конструкции.
,
шарнирно (или жестко) прикреплены в
точкеDстержни конструкции.
В нечетных вариантахв точкеDк валу жестко крепится тяжелый стержень или конструкция, состоящая из двух тяжелых стержней 1 и 2.Требуется определить реакции подпятника А и подшипника В.
В
четных вариантах(в том числе варианте
0) к валу в точкеDшарнирноприкреплен тяжелый
стержень или конструкция, состоящая из
двух жестко соединенных стержней 1 и 2,
причем
![]() .
Значениеn
и АВ приведены в табл.7.1. Конструкция
удерживается в заданном положение
невесомым горизонтальным тросом 3. Он
прикреплен к точке K,
положение которой показано на рис.7.1.
.
Значениеn
и АВ приведены в табл.7.1. Конструкция
удерживается в заданном положение
невесомым горизонтальным тросом 3. Он
прикреплен к точке K,
положение которой показано на рис.7.1.
Требуется определить реакцию невесомого троса 3 и реакцию шарнира D.
в) Указания к решению задачи.
1. Массой вала пренебрегаем.
2. При решении задачи применяем принцип Даламбера, для чего ко всем стержням, обладающим массой, прикладываем главные векторы сил инерции.
3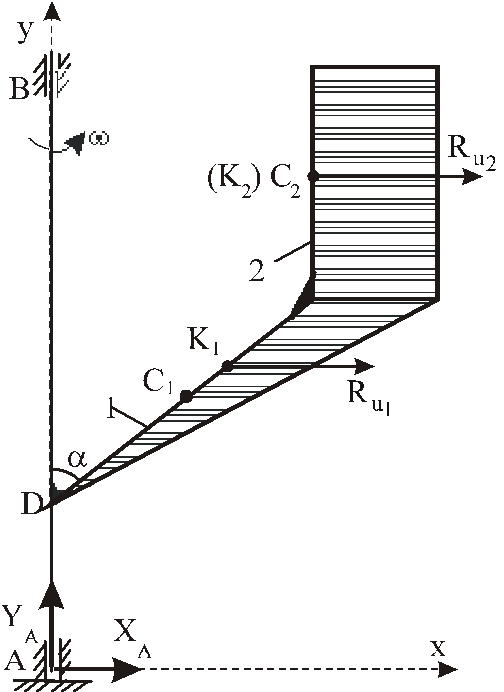 .
Если стержень параллелен валу, то эпюра
элементарных сил инерции имеет вид
прямоугольника, если стержень расположен
под углом к валу, то она имеет вид
треугольника (рис.1).
.
Если стержень параллелен валу, то эпюра
элементарных сил инерции имеет вид
прямоугольника, если стержень расположен
под углом к валу, то она имеет вид
треугольника (рис.1).
Главный
вектор сил инерции для стержня 1 приложен
в точке
![]() ,
расположенный на расстояние
,
расположенный на расстояние![]() от точкиD. Он направлен
от вала и равен по модулю:
от точкиD. Он направлен
от вала и равен по модулю:![]() .
.
Г
Рис.1.![]() ,
расположенной на середине стержня. Он
направлен от вала и равен по модулю
,
расположенной на середине стержня. Он
направлен от вала и равен по модулю
![]() .
.
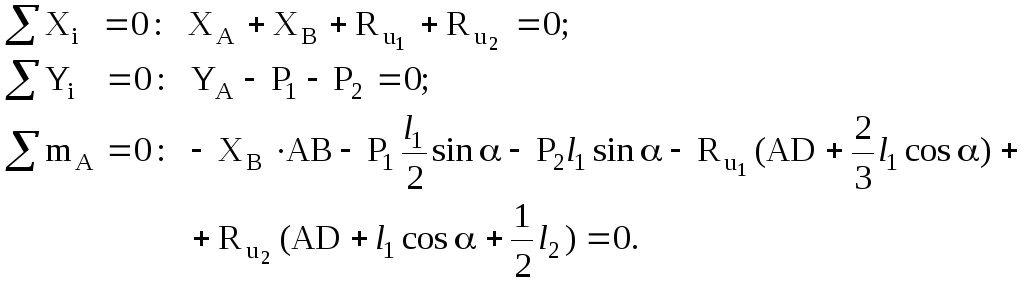
4. Так
как все внешние силы, реакции и главные
векторы сил инерции лежат в плоскости
рисунка, то имеем произвольную плоскую
систему сил и составляем три уравнения
статики:
![]()
г) Примеры решения задачи.
Пример 1.
1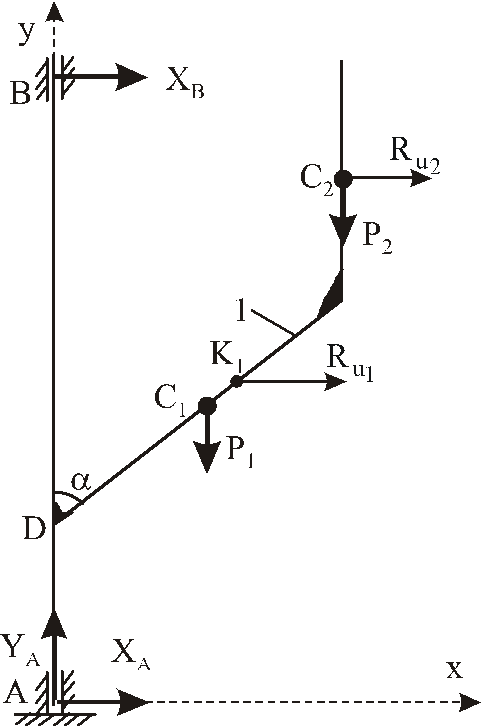 .Для нечетного варианта. Схема
изображена на рис.2.
.Для нечетного варианта. Схема
изображена на рис.2.
Дано:![]() м,
м,![]() м,
м,![]() м,
м,![]() м,
м,![]() ,
,![]() кг,
кг,![]() кг.
кг.
Определить:![]() .
.
Р
Рис.2.![]() и
и![]() ,
реакции
,
реакции![]() и
и![]() .
Изображаем главные векторы сил инерции
.
Изображаем главные векторы сил инерции![]() и
и![]() .
Так как стержень 1 расположен под угломк валу, то эпюра
элементарных сил инерции имеет вид
треугольника. Значит
.
Так как стержень 1 расположен под угломк валу, то эпюра
элементарных сил инерции имеет вид
треугольника. Значит![]() приложена к точке
приложена к точке![]() ,
расположенной на расстояние
,
расположенной на расстояние![]() от точкиD. Ее модуль равен
от точкиD. Ее модуль равен
![]() .
.
Эпюра
элементарных сил инерции, действующих
на отдельные точки стержня 2 имеет вид
прямоугольника. Значит вектор
![]() приложен в точке
приложен в точке![]() (центр масс). Ее модуль равен.
(центр масс). Ее модуль равен.
![]() .
.
В системе координат, показанной на рис.2, запишем три уравнения равновесия:
Находим сначала вспомогательные величины
![]()

а затем вычисляем реакции
![]()
Пример 2.
Р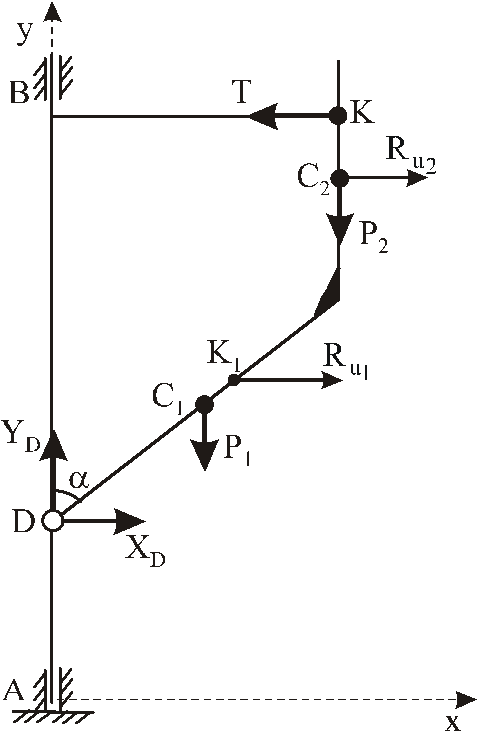 асчетная
схема изображена на рис.3. Надо найти
реакции:
асчетная
схема изображена на рис.3. Надо найти
реакции:![]() .
.
Здесь рассматриваем только равновесие стержневой конструкции, в точке Dкоторой имеется цилиндрический шарнир.
Составим три уравнения равновесия:
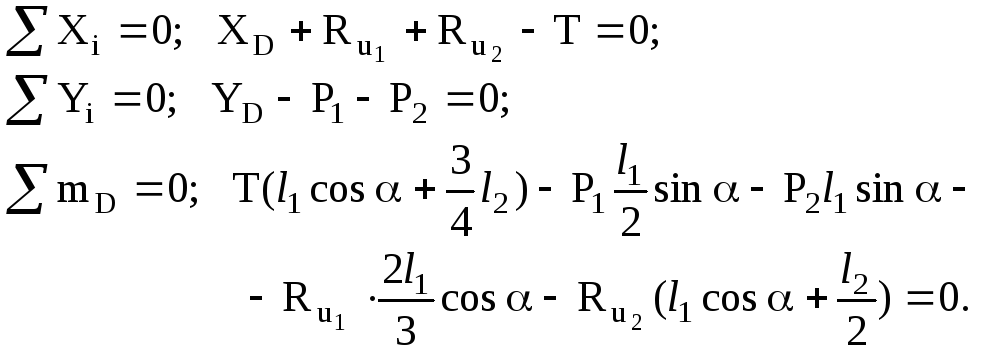
Т
Рис.3.![]() вычислены в первом примере, то, решая
уравнения равновесия, находим:
вычислены в первом примере, то, решая
уравнения равновесия, находим:
![]()
Таким образом, оба примера решены полностью