

30.Принципы построения управ устройств: второй уровень агрегатизации – модульный.
Модуль
– устройство, сост из ряда эл-тов,
закреплен на унифицир плате и соедин
внутр коммуникац каналами, предназнач
для выполн самостоят функций (интегрир,
дифференц, запомнинания). Точные
повторители – усилители мощности
сконструир на основе двухвходового
усилителя давлен и повторителя – усилит
мощности, соедин последоват и охвач
стопроцент отриц обрат связью. Передат
ф-ция: W(s)= .
Такой повторитель реализ операц
повторения с высок точностью. Интегратор
построен на основе пневматич RC-цепи,
охвач стопроцент положит обрат связью.
RC-цепь
состоит из глухой камеры объемом V
и регулируем пневмосопротив с коэфф
проводим β. Вход сигнал ∆p=рзд-рвх
и сигнал обрат связи суммир с помощью
пятимембран сумматора. Передат ф-ция:
W(s)=L(pи)/L(∆p)=
.
Такой повторитель реализ операц
повторения с высок точностью. Интегратор
построен на основе пневматич RC-цепи,
охвач стопроцент положит обрат связью.
RC-цепь
состоит из глухой камеры объемом V
и регулируем пневмосопротив с коэфф
проводим β. Вход сигнал ∆p=рзд-рвх
и сигнал обрат связи суммир с помощью
пятимембран сумматора. Передат ф-ция:
W(s)=L(pи)/L(∆p)= ,
Ти=V/(βRΘ).
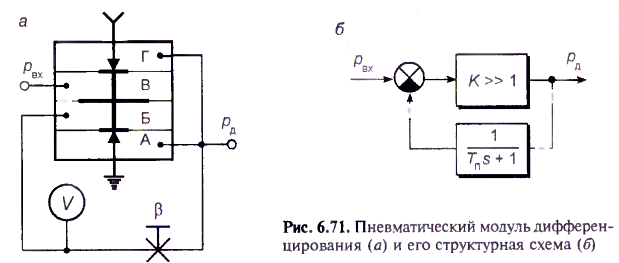
Дифференциатор строится на основе
трехмембран усилителя, в цепи обрат
отриц связи котор включ пневматич
RC-цепочка, сост из глухой камеры и
регулируем пневмосопротивл. Если К>>1,
а «паразит» емкости малы, то W(s)=
L(pд)/L(pвх)=
,
Ти=V/(βRΘ).
Дифференциатор строится на основе
трехмембран усилителя, в цепи обрат
отриц связи котор включ пневматич
RC-цепочка, сост из глухой камеры и
регулируем пневмосопротивл. Если К>>1,
а «паразит» емкости малы, то W(s)=
L(pд)/L(pвх)= ,
гдеТп=V/(βRΘ).
,
гдеТп=V/(βRΘ).
![]()

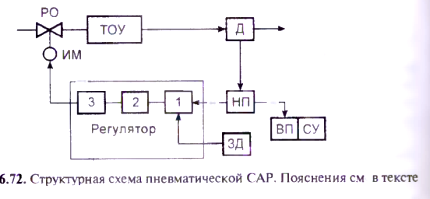
31. Принципы построения управ устройств: третий уровень агрегатизации – блочный.
Блок –функцион закончен конструкц единица, состоящ из ряда эл-тов и модулей. Использ для построен пневматич и пневмоэлектрич комплексов управ. На рис схема пневматич САР , в котор вход датчик Д, вторич измерит прибор ВП, регулир блок Р и исполнит устройство, сост из исполн механизма ИМ и регулир органа РО. Измер с помощью датчика знач регулир пар-ра должно быть преобраз в унифицир пневмат сигнал. Преобраз осущ с помощью встроен в датчик номирующ пневматич преобраз-ля, или с помощью комплекта из номирующ токового преобраз-ля НП и электропневмопреобраз. Пневмат сигнал поступ в регулятор и одновремен во вторич прибор, снабжен станцией управ СУ. В нее входят переключатель для выбора режима работы системы регулир, задатчик ЗД для формир задающ воздейст в атоматич режиме и команд сигнала в режиме ручн дистанц управ, и выключатель, формир команду рк отключ регулятора. Регулятор вырабат команд сигнал и посылает его по каналу связи на пневматич исполнит механизм. Пневматич регуляторы имеют структуру: мембран сумматор для сравнения 1, постающ от датчика Д и задатчика ЗД, модуль формир з-на регулир 2, точный повторитель – усилитель мощности 3.
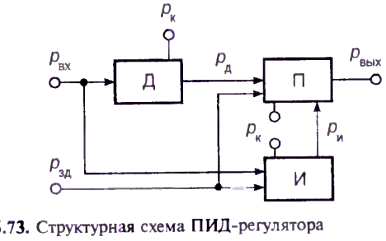
Блок
ПИД регулятора (пропорц-интегральн-дифференц).
Интегральн составляющ регулир формир
с помощью интегратора И, дифф составляющ
- дифференцатора Д. Суммирование pД,pИ
и рЗД
осущ на пятимембран сумматоре. Получ
пневматич сигнал умнож на коэфф усиления
Кр в дроссельн сумматоре П и поступ на
вход точного-повторителя-усилителя
мощн У для увелич расхода сжатого
расхода. ПИД-регулятор формир пневматич
сигнал:
 ,
Кр-коэфф усиления, Ти-время изодрома,
Тп-время предварения, рвх-давление,
соотв текущему знач регулир пар-ра,
рзд-давл, соотв заданному знач пар-ра.
,
Кр-коэфф усиления, Ти-время изодрома,
Тп-время предварения, рвх-давление,
соотв текущему знач регулир пар-ра,
рзд-давл, соотв заданному знач пар-ра.
1. Исполнительные устройства (стр 30 рис 47)
Устройство автоматической системы управления, воздействующие на технолог процесс в соответствии с полученным от управляющего устройства командным сигналом.
Выходным параметром устройства явл расход вещества или энергии, поступающих в объект управления или выходящих из него, входным – командный сигнал управляющего устройства.
Содержит несколько функциональных блоков: усилитель мощности, исполнительный механизм, регулирующий орган, датчик положения, блок обратной связи, блок сигнализации крайних положений, блок ручного управления.
По виду действия ИУ делится на нормально открытые (НО) и нормально закрытые (НЗ). При прекращении подвода энергии, создающей перестановочные усилия, проходное сечение НО полностью открывается, НЗ – полностью перекрывается.
Основными
функцион блоками ИУ явл исполнительный
механизм и регулирующий орган. 
