

5. Движение машины под действием заданных сил
В настоящей главе рассмотрена задача определения момента инерции маховых масс машины по заданному коэффициенту неравномерности хода машины.
Будем рассматривать механизмы с жесткими звеньями и с одной степенью подвижности, а силы, действующие на механизм, считаем известными в каждом положении механизма.
Основные понятия и термины
Уравнение движения
Для механизмов с одной степенью подвижности наиболее простое решение получается при использовании уравнения движения машины в виде
ΔТ = Т – Т0 = ΣА,
т.е. приращение кинетической энергии ΔТ механизма при переходе из начального положения в рассматриваемое равно сумме работ всех внешних сил, действующих на звенья механизма. При этом
Σ А = АДВ + АС + АG , (5.1)
где АДВ , АС и АG – работа соответственно сил движущих (АДВ > 0), сил сопротивления (АС < 0) и сил тяжести.
Динамическая модель механизма
В общем случае пользоваться уравнением (5.1) сложно, так как механизм может иметь много звеньев с различными массами и скоростями: на звенья действуют различные силы. Для механизмов с одной степенью подвижности удобно использовать одномассовую динамическую модель механизма (рис. 5.1).
При исследовании этой модели принимают следующие допущения: все звенья считаются абсолютно твердыми, кинематические пары недеформируемыми. Зазоры в парах отсутствуют.
На рис. 5.1, а изображена кинематическая схема кривошипно-ползунного рычажного механизма с жесткими звеньями и одной степенью свободы. Движение всех звеньев такого механизма полностью определяется законом движения (φ, ω, ε) начального звена ОА, где φ – угол поворота; ω – угловая скорость, а ε – угловое ускорение начального звена.
Для отыскания этого закона движения с учетом сил FC и MC, действующих на механизм, используют одну из двух представленных на рис. 5.1 динамических моделей.

Рис. 5.1. Динамические модели механизма с жесткими звеньями:
а− кинематическая схема механизма;бив– динамические модели механизма
На рис. 5.1, в представлена динамическая модель, в которой масса всех звеньев заменяется приведенным моментом инерции Iпр диска, жестко связанного со звеном ОА. Силы, действующие на механизм в этом случае, заменяются приведенными моментами сил МС пр и МD пр . При использовании обеих динамических моделей (рис. 5.1,б и 5.1,в) результаты расчета закона движения звена ОА будут одинаковы.
Приведенной массой mпр называется такая условная масса, сосредоточенная в точке приведения, кинетическая энергия которой равна сумме кинетических энергий приводимых звеньев в данном положении механизма:
 .
.
При приведении масс к вращающемуся звену (рис. 5.1,в) удобнее пользоваться понятием приведенного момента инерции Inp относительно оси вращения звена приведения:
 ,
,
где mi , IS i – масса и осевой момент инерции относительно оси, проходящей через центр масс i -го звена; VS i , ωi – соответственно скорость масс i -го звена и угловая скорость
i -го звена; VA – скорость точки приведения; ωОА – угловая скорость звена приведения.
Приведенной силой (моментом) называют условную силу (момент), которая, будучи приложена к звену приведения, развивает мощность Р, равную мощности приводимых сил и моментов в рассматриваемом положении механизма.
Величина приведенной силы, направленной по скорости точки приведения, равна

Приведенный момент силы равен
где Fk – величина приводимой силы, приложенной в точке k механизма;
Vк
–
скорость точки k;
αk
–
угол
между векторами
![]() и
и![]() .
Mk
–
момент, приложенный к звену k;
ωk
–
угловая скорость k-
го звена.
.
Mk
–
момент, приложенный к звену k;
ωk
–
угловая скорость k-
го звена.
Из формул следует, что приведенная масса и приведенная сила зависят от отношения квадратов скоростей приводимых звеньев к квадрату скорости звена
приведения. Таким образом, приведенная сила и приведенная масса являются функцией обобщенной координаты.
Режимы движения машины
На рис. 5.2 показана графическая зависимость скорости ω начального звена механизма с одной степенью свободы от времени t. Полное время движения машины можно разделить на три участка, соответствующих следующим режимам движения.

Рис. 5.2. Тахограмма движения начального звена механизма
Разгон, в процессе которого происходит постепенное возрастание скорости начального звена от нуля до среднего значения ωср. Энергетическую характеристику этого периода: АD > AC.
При установившемся движении скорость начального звена периодически изменяется около одного и того же среднего значения ωср. Минимальный промежуток времени, по истечении которого начальное звено возвращается в первоначальное положение, имея первоначальное значение скорости, называется циклом установившегося движения. Энергетическая характеристика этого режима движения за цикл установившегося движения: АD = AC .
Выбег характеризуется постепенным уменьшением скорости начального звена от среднего значения ωср до нуля. Энергетическая характеристика выбега: АD < AC .
Для машин, в которых преобладает установившийся режим движения, одним из критериев работоспособности является коэффициент δ неравномерности установившегося движения
δ = (ωmax − ωmin)/ ωср,
где ωmax, ωmin , ωср – соответственно максимальное, минимальное и среднее значения угловой скорости начального звена за цикл.
Определение момента инерции маховых масс машины
методом Мерцалова
Приведенный момент инерции Jм машины можно представить как сумму двух слагаемых
Jм = Jc + Jv ,
где Jv – приведенный момент инерции звеньев механизма, связанных со звеном приведения переменным передаточным отношением;
Jc – приведенный момент инерции звеньев, связанных со звеном приведения постоянным передаточным отношением (маховых масс машины).
Кинетическую энергию машины представим как сумму
Тм = Тc + Тv,
где Тv ≈ ωср2 Jv /2 ; ωср – средняя угловая скорость звена приведения при установившемся движении.
Изменение кинетической энергии Тc возможно только за счет изменения угловой скорости ω звена приведения.
∆Тc = ∆Тм – Тv.
Экстремальные значения кинетической энергии маховых масс соответственно равны Тc.max = ω max 2 Jc /2 ; Тc.min = ω min2 Jc /2,
где ω max и ω min – максимальное и минимальное значение угловой скорости начального звена за цикл установившегося движения
ω max = ωср (1+ [δ] /2); ω min = ωср (1– [δ] /2),
где [δ] = (ω max– ω min) / ωср – допускаемый коэффициент неравномерности установившегося движения машины, заданный в исходных данных на проектирование.
Из совместного решения зависимостей четырех последних уравнений получим приведенный момент инерции маховых масс
Jc = (Тc.max – Тc.min) / ([δ] ωср2).
Последовательность действий при определении момента инерции Jc маховика по методу Мерцалова
– Для всех положений механизма внутри цикла установившегося движения рассчитать и построить график «МС – φ» приведенных моментов МС сил сопротивления в зависимости от угла φ начального звена (см. рис. 5.3,а).
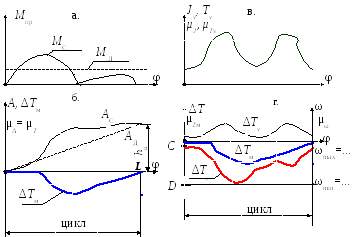
Рис. 5.3. Определение момента инерции маховых масс машины методом Мерцалова
– Методом графического интегрирования построить график приращения работ «АС – φ» сил сопротивления за цикл (рис. 5.3,б). Соединяем начало и конец этого графика прямой. Эта прямая представляет собой график приращения работы «АД – φ» движущих сил за цикл. По этим графикам, замеряя разность ординат (АД – АС) для каждого положения механизма, строим диаграмму разности работ, одновременно являющуюся диаграммой приращения кинетической энергии «∆ТМ – φ» машины с маховиком. Обозначим масштаб этой диаграммы μТ.
– Для ряда последовательных положений механизма внутри цикла установившегося движения рассчитать и построить в масштабе μJ график приведенных моментов инерции «Jv – φ» звеньев механизма (рис. 5.3, в). Этот график представляет собой диаграмму кинетической энергии «Тv – φ» звеньев, изображенную в масштабе μТv.
μТv = μJ ωср2 /2,
где ωср – средняя угловая скорость начального звена приведения при установившемся движении.
– В масштабе μТ строим диаграмму изменения кинетической энергии «∆Тconst– φпр» маховых масс (рис. 5.3, г).
∆ Тc = ∆Тм – Тv.
Замеряя по оси ординат расстояние между самой верхней и самой нижней точками этой диаграммы, находим отрезок СD.
Затем определяем момент инерции маховых масс:
Jc= (CD) μТ /([δ] ωср2).
Выбор электродвигателя
При выборе электродвигателя учитывается ряд требований: режим работы механизма, вид тока (переменный или постоянный), надежность и экономичность электромеханической системы и т.д. В рамках настоящего курсового проектирования задача выбора электродвигателя решается ограниченно и состоит в подборе его марки по табл. 5.1, исходя из его требуемой мощности Р.
Требуемая мощность электродвигателя, кВт:
Рдв.тр = Ац n1 /(60000 ñ η ) ,
где Aц – работа, производимая выходным звеном за цикл установившегося движения: Aц = (KL) μТ , (рис. 5.3, б);
n1 – частота вращения кривошипа, мин–1;
ñ – число оборотов начального звена за время одного цикла;
η – КПД машины. Ориентировочно примем КПД машины η = 0,8.
По требуемой мощности из табл. 5.1 выбирается асинхронный электродвигатель серии 4А с ближайшей большей стандартной мощностью при заданной синхронной скорости. В табл. 5.1 указаны также величины скольжения S, %, и mD2∙10– 4, кг ∙ м2.
Таблица 5.1. Электродвигатели асинхронные серии 4А закрытые, обдуваемые
|
Мощьность Р, кВт |
Синхронная частота вращения nс, мин –1 | |||||||||||
|
3000 |
1500 |
1000 |
750 | |||||||||
|
Типоразмер |
S, % |
mD210-4 кг ∙м2 |
Типоразмер |
S, % |
mD210-4 кг ∙м2 |
Типоразмер |
S, % |
mD210-4 кг ∙м2 |
Типоразмер |
S, % |
mD210-4 кг ∙м2 | |
|
0,09 |
50А2 |
8,7 |
0,98 |
50В4 |
8,7 |
1,3 |
|
|
|
|
|
|
|
0,12 |
50В2 |
9,7 |
1,07 |
56А4 |
8,3 |
28 |
|
|
|
|
|
|
|
0,18 |
56А2 |
6,7 |
16,6 |
56В4 |
9 |
31,5 |
63А6 |
11 |
69,4 |
|
|
|
|
0,25 |
56В2 |
7,7 |
18,6 |
63А4 |
8 |
49,5 |
63В6 |
11 |
86 |
71В8 |
9,3 |
74 |
|
0,37 |
63А2 |
8,3 |
30,5 |
63В4 |
9 |
52 |
71А6 |
9 |
67 |
80А8 |
10 |
135 |
|
0,55 |
63В2 |
8,6 |
36 |
71А4 |
7,3 |
55 |
71В6 |
10 |
81 |
80В8 |
6,7 |
162 |
|
0,75 |
71А2 |
5,3 |
39 |
71В4 |
7,3 |
57 |
80А6 |
8,5 |
485 |
90LA8 |
6,7 |
270 |
|
1,1 |
71В2 |
6,3 |
42 |
80А4 |
5,4 |
129 |
80В6 |
8 |
184 |
90LB8 |
6,7 |
345 |
|
1,5 |
80А2 |
4,2 |
73 |
80В4 |
5,8 |
133 |
90L6 |
6,4 |
294 |
100L8 |
6,7 |
520 |
|
2,2 |
80В2 |
4,3 |
85 |
90L4 |
5,1 |
224 |
100L6 |
5,1 |
524 |
112MA8 |
6,7 |
700 |
|
3,0 |
90L2 |
3,3 |
104,1 |
100S4 |
4,4 |
347 |
112MA6 |
4,7 |
700 |
112M8 |
6,7 |
1000 |
|
4,0 |
100S2 |
3,4 |
237 |
100L4 |
4,7 |
450 |
112MB6 |
5,1 |
800 |
132S8 |
4,1 |
1700 |
|
5,5 |
100L2 |
2,5 |
300 |
112M4 |
3,7 |
700 |
132S6 |
3,3 |
1600 |
132M8 |
4,1 |
2300 |
|
7,5 |
112M2 |
2,3 |
400 |
132S4 |
3 |
1100 |
132M6 |
3,2 |
2300 |
160S8 |
2,5 |
5500 |
|
11 |
132M2 |
2,1 |
900 |
132M4 |
2,8 |
1600 |
160S6 |
2,7 |
5500 |
160M8 |
2,5 |
7200 |
|
15 |
160S2 |
2,1 |
1900 |
160S4 |
2,3 |
4100 |
160M6 |
2,6 |
7300 |
180M8 |
2,5 |
10000 |
|
18,5 |
160M2 |
2 |
2100 |
160M4 |
2,2 |
5100 |
180M6 |
2,7 |
8800 |
200M8 |
2,3 |
16000 |
|
22 |
180S2 |
1,9 |
2800 |
180S4 |
2 |
7600 |
200M6 |
2,8 |
16000 |
200L8 |
2,7 |
18100 |
|
30 |
180M2 |
1,9 |
3400 |
180M4 |
1,9 |
9300 |
200L6 |
2,1 |
18100 |
225M8 |
1,8 |
29500 |
|
37 |
200M2 |
1,8 |
5800 |
200M4 |
1,7 |
14700 |
225M6 |
1,8 |
29500 |
250S8 |
1,5 |
46200 |
|
45 |
200L2 |
1,8 |
6700 |
200L4 |
1,6 |
17800 |
250S6 |
1,4 |
46200 |
250M8 |
1,4 |
54500 |
После выбора электродвигателя определяется частота nд вращения его вала, общее передаточное число u привода и приведенный момент инерции Jпр привода по следующим формулам:
nд = nс (1 – 0,01 S %), мин –1;
u = nд / n;
Jпр ≈ 1,7 (mD2) u2, кг ∙м2,
где mD2 – произведение массы ротора двигателя на квадрат его диаметра, указанное в табл. 5.1.
Величина момента инерции Jмхв маховика
Jмхв = Jc – Jпр .
При расчете маховых масс по методу Мерцалова исходят из предположения, что приведенный момент сил движущих в течение цикла является постоянным. В действительности момент на валу двигателя при установившемся движении тем больше, чем меньше его угловая скорость. Поэтому полученное значение Jмхв приведенного момента инерции маховика является несколько завышенным.
Уточнение расчета выполняется методом последовательных приближений. Из первого приближения находится зависимость угловой скорости ω1 звена приведения от его угла φ1 поворота. Затем для каждого положения механизма определяется приведенный момент движущих сил. Далее проводятся все описанные ранее действия по методу Мерцалова, в результате которых находится уточненное значение момента инерции маховика.