

В.Б. Покровский
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН.
ДИНАМИЧЕСКИЙ АНАЛИЗ.
ЗУБЧАТЫЕ ЗАЦЕПЛЕНИЯ
Конспект лекций
Научный редактор проф., д-р техн. наук В.В. Каржавин
Екатеринбург
2004
УДК 621.01 (075.8)
ББК 34.41.я 73
П48
Рецензенты: кафедра “Подъемно-транспортное оборудование” Российского государственного профессионально-педагогического университета; доцент кафедры “Теоретическая механика” УГТУ-УПИ, канд. техн. наук Б.В.Трухин
Автор: В.Б. Покровский
П48 Теория механизмов и машин: динамический анализ, зубчатые зацепления: конспект лекций/ В.Б. Покровский. Екатеринбург: ООО.«Издательство УМЦ УПИ», 2004. 49с.
Конспект лекций предназначен для студентов дистанционного обучения машиностроительных специальностей, а также других форм обучения, изучающих теорию механизмов и машин в техническом вузе.
Содержание соответствует программе обучения и требованиям государственных образовательных стандартов. Изучение материалов лекций следует вести с использованием учебной литературы, указанной в конце работы, и сопровождать разбором и решением задач.
Подготовлено кафедрой Детали машин
УДК 621.01 (075.8)
ББК 34.41.я 73
© ООО «Издательство УМЦ УПИ», 2004
Оглавление
|
Лекция 1. |
Динамический анализ и синтез машинного агрегата................................... |
4 |
|
|
Жесткие динамические модели. Оценка неравномерности движения звена приведения при установившемся режиме работы.............................. |
5 |
|
Лекция 2. |
Определение приведенных моментов инерции звеньев машинного агрегата……………………………………….................................................. |
9 |
|
|
Приведение моментов инерции звеньев исполнительного механизма. Определение приращения кинетической энергии машинного агрегата…. |
11 |
|
Лекция 3. |
Определение приведенного момента инерции приводного механизма…. |
13 |
|
Лекция 4. |
Виды зубчатых механизмов. ............................... .......................................... |
15 |
|
Лекция 5. |
Кинематика зубчатых передач. ............................... ...................................... |
18 |
|
Лекция 6. |
Параметры цилиндрических зубчатых передач и колес.............................. |
26 |
|
|
Основной закон зацепления............................... ............................................ |
28 |
|
Лекция 7. |
Построение эвольвенты. Свойства эвольвенты. .......................................... |
29 |
|
|
Уравнение эвольвенты. Способы изготовления зубчатых колес. Исходный контур инструмента. Смещение инструмента при нарезании зубчатых колес. ............................... ............................................................... |
32 |
|
Лекция 8. |
Исключение подреза. Расчет минимального числа зубьев. ........................ |
34 |
|
|
Определение минимального коэффициента смещения, исключающего подрез при нарезании числа зубьев меньшего минимального………….... |
36 |
|
Лекция 9. |
Геометрические параметры зубчатой передачи. .......................................... |
39 |
|
|
Межосевое расстояние. Радиусы окружностей вершин и впадин зубьев. Толщина зубьев по дуге делительной окружности. .................................... |
41 |
|
Лекция 10. |
Качественные характеристики зубчатой передачи. ..................................... |
43 |
|
|
Коэффициент перекрытия. Скорость скольжения зубьев. Коэффициент удельного скольжения. ............................... ................................................... |
45 |
Лекция 1
Динамический анализ и синтез машинного агрегата.
При динамическом анализе и синтезе рассматриваются динамические модели или схемы замещения реального машинного агрегата.
Различают две формы динамических моделей:
Модель с жесткими звеньями (рис. 1, 2). При формировании такой модели принимается допущение о том, что все звенья являются абсолютно твердыми телами, а кинематические пары не имеют зазоров между элементами.
Модель с упругими звеньями (рис. 3). В такой модели учитывается деформация звеньев и определяются силы и моменты сил упругости на основе решения уравнения Лагранжа 2 рода.

Рис. 1
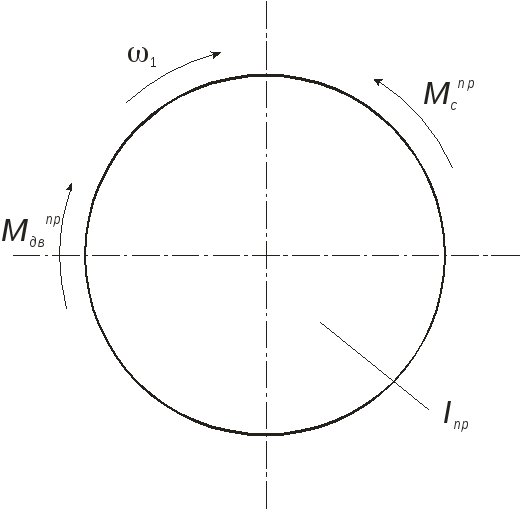
Рис. 2
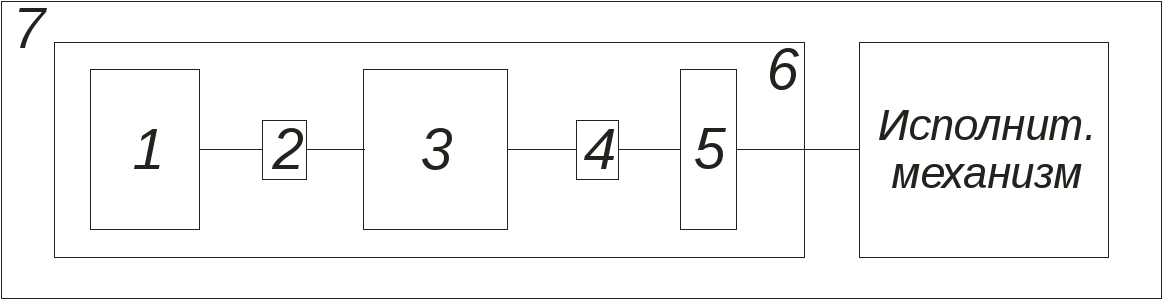
Рис. 3
Позициями на рис.3 обозначены:
1 - электродвигатель
2,4 - муфты
3 - редуктор
5 - маховик
6 – приводной механизм
7 – машинный агрегат
Жесткие динамические модели.
При формировании модели выбирается звено приведения. Это может быть любое звено машины, но, как правило, выбирают ведущее звено приводного механизма или ведущее звено исполнительного механизма.
Если звено приведения совершает поступательное движение, то динамическая модель имеет форму (см. рис.1).
При вращательном движении звена приведения форма модели представлена на рис. 2.
![]() –линейная или
угловая скорость звена приведения;
–линейная или
угловая скорость звена приведения;
![]() –приведенная сила
или момент сопротивления;
–приведенная сила
или момент сопротивления;
![]() - приведенная
движущая сила или момент;
- приведенная
движущая сила или момент;
![]() –приведенная масса
или момент инерции.
–приведенная масса
или момент инерции.
Движение звеньев происходит под действием приложенных к ним сил, которые совершают работу.
Для жесткой динамической модели движение описывается уравнением работ
 ,
,
где
![]() –
работа движущих сил;
–
работа движущих сил;
![]() –работа сил
сопротивления;
–работа сил
сопротивления;
![]() –сумма кинетических
энергий всех звеньев в i-м
положении и нулевом (в начале отсчета).
–сумма кинетических
энергий всех звеньев в i-м
положении и нулевом (в начале отсчета).
Рассматриваются 3 периода движения машины (рис. 4).
В период пуска
![]() .
.
В период
установившегося движения
![]() в начале и конце цикла.
в начале и конце цикла.
В период выбега
![]() .
.
Цикл – время, по истечении которого звено приведения возвращается в первоначальное положение, имея первоначальное значение скорости.

Рис. 4
Оценка неравномерности движения звена приведения при установившемся режиме работы.
В дифференциальной форме уравнение работ может быть представлено в виде

где
![]() – угол поворота звена приведения
– угол поворота звена приведения

![]()
 .
.
Таким образом

где
 – аналог углового ускорения звена
приведения
– аналог углового ускорения звена
приведения
Первые два слагаемых в дифференциальном уравнении движения учитывают инерционные нагрузки, возникающие при неравномерном движении звеньев.
Следовательно,
при определении
![]() учитываются только активные силы –
технологические нагрузки и вес звеньев.
учитываются только активные силы –
технологические нагрузки и вес звеньев.
Поскольку
![]() ,
то и
,
то и![]() ,
т.е. угловая скорость звена приведения
является переменной величиной.
,
т.е. угловая скорость звена приведения
является переменной величиной.
Критерием неравномерности вращения звена приведения при установившемся движении является коэффициент неравномерности установившегося движения:
 ,
,
где
![]() –
максимальная угловая скорость;
–
максимальная угловая скорость;
 ;
;
![]() –минимальная угловая
скорость;
–минимальная угловая
скорость;
 ;
;
![]() –средняя угловая
скорость;
–средняя угловая
скорость;
 .
.
Лекция 2
Определение приведенных моментов инерции масс звеньев машинного агрегата.
Машинный агрегат имеет структуру, которая представлена на рис. 3.
Одной из задач динамического синтеза является определение момента инерции маховика, обеспечивающего заданный коэффициент неравномерности установившегося движения δ.
Момент инерции маховика, установленного на валу ведущего звена исполнительного механизма, который является звеном приведения, определяется по формуле
![]() ,
,
где
![]() – приведенный момент инерции ротора
(якоря) электродвигателя, (1,1 – коэффициент,
учитывающий приведенные массы муфт);
– приведенный момент инерции ротора
(якоря) электродвигателя, (1,1 – коэффициент,
учитывающий приведенные массы муфт);
![]() –приведенный
момент инерции зубчатых колес и валов
редуктора;
–приведенный
момент инерции зубчатых колес и валов
редуктора;
![]() –приведенный
момент инерции приводного механизма;
–приведенный
момент инерции приводного механизма;
![]() ,
,
где
![]() –
приращение кинетической энергии
привода.
–
приращение кинетической энергии
привода.
![]() ,
,
где
![]() –
приращение кинетической энергии
машинного агрегата;
–
приращение кинетической энергии
машинного агрегата;
![]() –приращение
кинетической энергии звеньев
исполнительного механизма.
–приращение
кинетической энергии звеньев
исполнительного механизма.
В соответствии с уравнением работ
![]() .
.
Приращение кинетической энергии звеньев исполнительного механизма определяется по формуле
![]() ,
,
где
![]() –
кинетическая энергия звеньев вi-м
положении.
–
кинетическая энергия звеньев вi-м
положении.
![]() –кинетическая
энергия в начальном положении (минимальное
значение).
–кинетическая
энергия в начальном положении (минимальное
значение).

где
![]() ,
,![]() _–_приведенный
момент инерции звеньев исполнительного
механизма в i-м
и начальном положении, кг·м2;
_–_приведенный
момент инерции звеньев исполнительного
механизма в i-м
и начальном положении, кг·м2;
ω1 – угловая скорость звена приведения, 1/с.
Приведение моментов инерции звеньев исполнительного механизма.
По закону сохранения энергии кинетическая энергия приведенной массы (момента инерции) равна сумме кинетических энергий приводимых масс и моментов инерции.
 .
.
Приведенный момент инерции звеньев исполнительного механизма в i-м положении
 ,
,
где
![]() – момент инерцииk-го
звена, кг·м2;
– момент инерцииk-го
звена, кг·м2;
![]()
![]() –масса k-го
звена, кг;
–масса k-го
звена, кг;
![]() –угловая скорость
k-го
звена в i-м
положении, 1/с;
–угловая скорость
k-го
звена в i-м
положении, 1/с;
![]() –скорость центра
тяжести k-го
звена в i-м
положении, м/с;
–скорость центра
тяжести k-го
звена в i-м
положении, м/с;
n – число подвижных звеньев.
По рассчитанным
значениям
![]() и
и![]() определяются величины приращения
кинетической энергии звеньев
исполнительного механизма
определяются величины приращения
кинетической энергии звеньев
исполнительного механизма
 .
.
Определение приращения кинетической энергии машинного агрегата
По уравнению работ
![]() ,
,
где
![]() – работа движущих сил;
– работа движущих сил;
![]() –работа сил
сопротивления.
–работа сил
сопротивления.

где
![]() – приведенный момент движущих сил;
– приведенный момент движущих сил;
![]() –приведенный
момент сил сопротивления;
–приведенный
момент сил сопротивления;
![]() –угол поворота
звена приведения.
–угол поворота
звена приведения.
Приведенным моментом называется момент, приложенный к звену приведения, работа которого на элементарном угле поворота звена равна сумме работ приводимых сил и моментов.
Поскольку мощность – это работа в единицу времени, то мощность приведенного момента равна сумме мощностей приводимых сил и моментов.
Таким образом
 .
.
 ,
,
где
![]() – момент, приложенный кi-му
звену;
– момент, приложенный кi-му
звену;
![]() –угловая скорость
i-го
звена;
–угловая скорость
i-го
звена;
![]() –сила, приложенная
к i-му
звену;
–сила, приложенная
к i-му
звену;
![]() –скорость точки
приложения силы Pi;
–скорость точки
приложения силы Pi;
![]() –угол между
векторами Pi
и скорости Vi.
–угол между
векторами Pi
и скорости Vi.