

Лекция 6
Параметры цилиндрических зубчатых передач и колес.
Зубчатое зацепление – кинематическая пара 4 класса, элементы которой представляют собой взаимоогибаемые кривые, передающие движение качением со скольжением.
Схема внешнего зубчатого зацепления представлена на рис. 16.
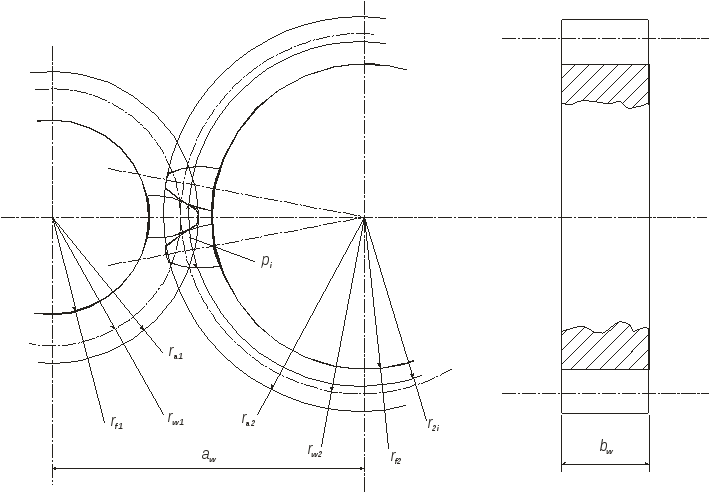
Рис.16
Основным кинематическим параметром зубчатой передачи является передаточное отношение
где
![]() – угловые скорости шестерни и колеса;
– угловые скорости шестерни и колеса;
![]() –числа зубьев;
–числа зубьев;
![]() –радиусы начальных
окружностей
–радиусы начальных
окружностей
Начальные окружности это окружности, которые контактируют в полюсе зацепления и перекатываются друг по другу в процессе зацепления без скольжения.
![]() –межосевое
расстояние;
–межосевое
расстояние;
![]() –ширина зубчатого
венца;
–ширина зубчатого
венца;
 –коэффициент
ширины;
–коэффициент
ширины;
![]() –радиусы окружностей
вершин зубьев;
–радиусы окружностей
вершин зубьев;
![]() –радиусы
окружностей впадин зубьев.
–радиусы
окружностей впадин зубьев.
Если провести,
например на колесе, окружность
произвольного радиуса
![]() ,
то расстояние между одноименными точками
соседних зубьев, измеренное по этой
окружности будет являться шагом
зацепленияPi.
,
то расстояние между одноименными точками
соседних зубьев, измеренное по этой
окружности будет являться шагом
зацепленияPi.
Длина окружности
радиусом
![]() вычисляется
по формуле
вычисляется
по формуле
![]() ,
,
 ,
,
обозначим
 ,
,
![]() –модуль зацепления,
соответствующий шагу Pi,
измеренному по окружности радиуса
–модуль зацепления,
соответствующий шагу Pi,
измеренному по окружности радиуса
![]() .
.
Модуль зацепления является стандартным параметром зубчатой передачи, регламентированным ГОСТ 9563-60.
Окружность диаметром d, по которой измеряется шаг, соответствующий стандартному значению модуля, называется делительной.
ГОСТ 2185-66
регламентирует значения
![]() ,
,![]() ,
,![]() .
.
Основной закон зацепления.
Рассмотрим передачу движения двумя взаимоогибаемыми кривыми (рис. 17).
N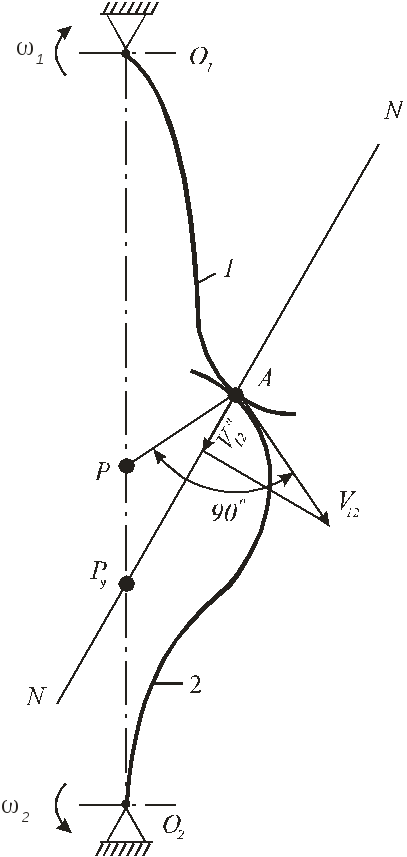 N
– общая нормаль к звеньям 1,2 в точке их
контакта А;
N
– общая нормаль к звеньям 1,2 в точке их
контакта А;
P – полюс зацепления (мгновенный центр относительного движения);
V12 – скорость относительного движения;
V12п – проекция скорости V12 на нормаль NN.
Если V12п ≠ 0, то звенья 1 и 2 будут либо внедряться друг в друга, либо расходиться, т.е. движение механизма будет невозможно.
Таким образом, движение с заданным передаточным отношением
будет возможно только в том случае, если общая нормаль к сопрягаемым элементам кинематической пары будет
Рис. 17 проходить через полюс зацепления P.
Этот закон носит название теоремы Виллиса.
Основному закону зацепления удовлетворяют кривые, которые называются эвольвентами.
Лекция 7
Построение эвольвенты. Свойства эвольвенты.
И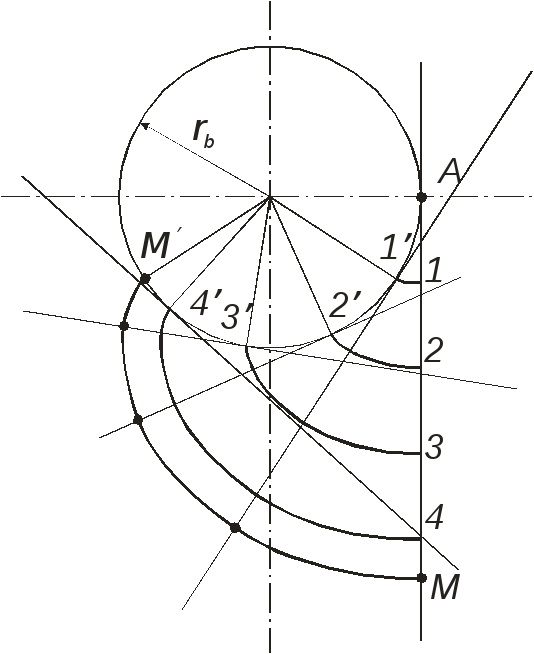 зобразим
окружность радиусаrb
и проведем к ней касательную в точке А
(рис.18).
зобразим
окружность радиусаrb
и проведем к ней касательную в точке А
(рис.18).
Разделим касательную на несколько отрезков A-1, 1-2, 2-3 и т.д. и такие же отрезки дуг выделим на окружности A-1´, 1´-2´ и т.д.
Осуществим перекатывание касательной по окружности, последовательно совмещая точки, которые в процессе движения будут описывать кривые, называемые эвольвентами.
Рис. 18
Свойства эвольвенты:
Касательная к окружности является нормалью к эвольвенте.
Расстояние от точки касания до эвольвенты представляет собой радиус кривизны эвольвенты.
Участки эвольвенты, описанные разными точками одной касательной, при наложении совпадают, т.е. являются участками одной эвольвенты M-M´.
Уравнение эвольвенты.
Рис. 19
Положение т. M эвольвенты определяется длиной радиус-вектора l и углом β
По построению эвольвенты
![]() .
.
Таким образом,
То есть координаты любой точки эвольвенты определяются углом α и радиусом rв, который является радиусом основной окружности.
Способы изготовления зубчатых колес.
Основные способы изготовления: огибание (обкатка) и копирование.
При копировании инструмент имеет форму впадины зуба (рис. 20). Это дисковая или пальцевая фреза. После вырезания впадины заготовка поворачивается на шаг зацепления и процесс повторятся.
Рис. 20
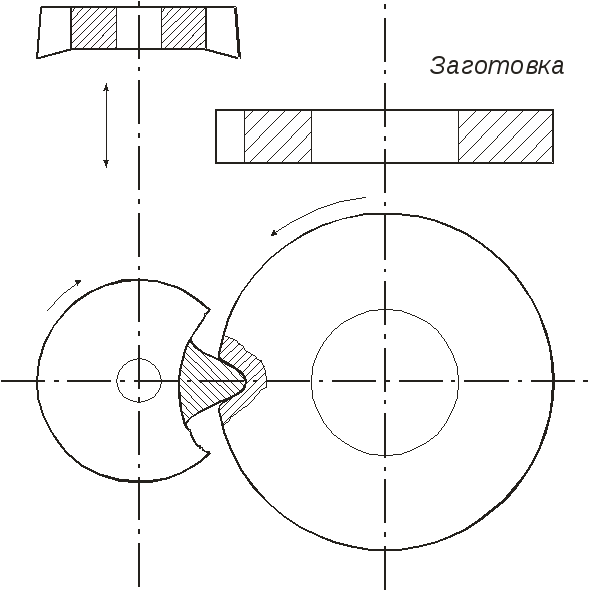
Рис. 21
При огибании инструмент (червячная фреза, долбяк, инструментальная гребенка) входит в контакт с заготовкой и осуществляет зацепление (рис. 21), удаляя металл, препятствующий относительному движению.
Исходный контур инструмента.
Профиль инструментальной гребенки или развертка инструментальной фрезы имеет вид (рис. 22)
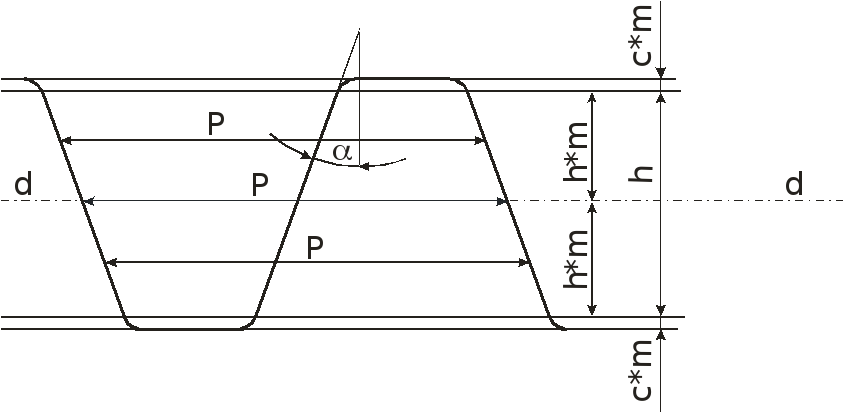
Рис. 22
d-d – делительная прямая;
α – угол исходного контура, α=20°;
C* – коэффициент радиального зазора, C*=0,25;
h* – коэффициент высоты зуба, h*=1,0;
p – шаг зацепления, p.=.const.
Смещение инструмента при нарезании зубчатых колес
Делительная прямая исходного контура по отношению к делительной окружности нарезаемого колеса может занимать 3 положения (рис. 23).
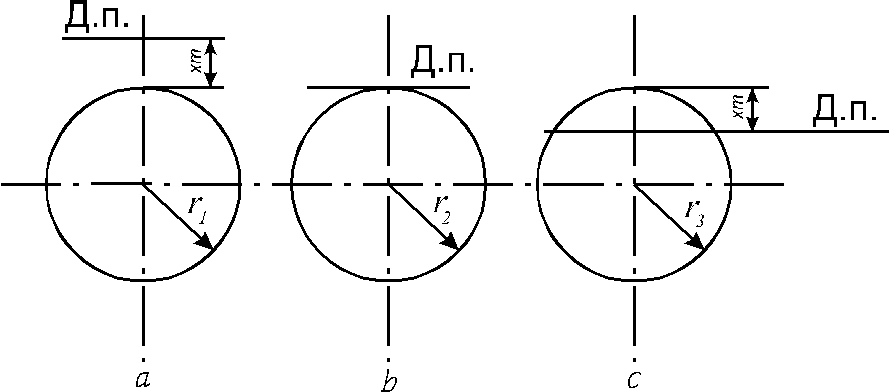
Рис. 23
Положительное смещение (рис. 23,а) x>0, нулевое смещение (рис..23,б) x = 0, отрицательное смещение (рис. 23с) x<0.
x – коэффициент смещения;
xm – смещение инструмента.
Смещение инструмента осуществляется с целью:
исключения подреза ножки зуба при z<zmin;
обеспечения фиксированного межосевого расстояния;
улучшения качественных и прочностных характеристик передач.