

1.5 Кодирование и построение структурной таблицы для автомата Мили
Табл.3. Кодирование состояний
|
q1 |
q2 |
q3 |
q4 |
q5 |
|
000 |
001 |
010 |
011 |
100 |
Табл.4. Структурная таблица переходов-выходов для автомата Мили
|
Состояние автомата |
Входные сигналы | ||||||||
|
1 |
х1 |
х̅1 |
x2 |
х̅2х3 |
х̅2х̅3 |
x4х5 |
х4х̅5 |
х̅4 | |
|
000 |
001 |
|
|
|
|
|
|
|
|
|
001 |
|
010 |
000 |
|
|
|
|
|
|
|
010 |
|
|
|
011 |
011 |
000 |
|
|
|
|
011 |
100 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
011 |
000 |
000 |
1.6 Построение функций возбуждения для автомата Мили
Табл.5. Таблица переходов Т-триггера
|
Состояние RS-триггера |
Входной сигнал Т | ||
|
00 |
01 |
10 | |
|
0 |
0 |
1 |
0 |
|
1 |
1 |
1 |
0 |
Табл.6. Таблица функций возбуждения для автомата Мили
|
Состояние автомата |
Входные сигналы | ||||||||
|
1 |
х1 |
х̅1 |
x2 |
х̅2х3 |
х̅2х̅3 |
x4х5 |
х4х̅5 |
х̅4 | |
|
000 |
*0 *0 01 |
|
|
|
|
|
|
|
|
|
001 |
|
*0 01 10 |
*0 *0 10 |
|
|
|
|
|
|
|
010 |
|
|
|
*0 0* 01 |
*0 0* 01 |
*0 10 *0 |
|
|
|
|
011 |
01 10 10 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
10 01 01 |
10 *0 *0 |
10 *0 *0 |
|
α1α2α3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1S1 R2S2 R3S3 |
R1 = α1ᾱ2ᾱ3
S1 = ᾱ1α2α3
R2 = ᾱ1α2α3 + ᾱ1α2ᾱ3х̅2х̅3
S2 = ᾱ1ᾱ2α3x1 + ᾱ1α2α3x4x5
R3 = ᾱ1α2α3 + ᾱ1ᾱ2α3 = ᾱ1α3
S3 = ᾱ1ᾱ2ᾱ3 + ᾱ1α2ᾱ3x2 + ᾱ1α2ᾱ3х̅2x3 + α1ᾱ2ᾱ3x4x5
1.7 Построение функций выходов для автомата Мили
Табл.7. Структурная таблица выходов для автомата Мили
|
Состояние автомата |
Входные сигналы | ||||||||
|
1 |
х1 |
х̅1 |
x2 |
х̅2х3 |
х̅2х̅3 |
x4х5 |
х4х̅5 |
х̅4 | |
|
000 |
y1 |
|
|
|
|
|
|
|
|
|
001 |
|
y2 |
y5 |
|
|
|
|
|
|
|
010 |
|
|
|
y3 |
- |
y5 |
|
|
|
|
011 |
y4 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
y3 |
y5 |
y5 |
y1 = ᾱ1ᾱ2ᾱ3
y2 = ᾱ1ᾱ2α3х1
y3 = ᾱ1α2ᾱ3x2 + α1ᾱ2ᾱ3x4x5
y4 = ᾱ1α2α3
y5 = ᾱ1ᾱ2α3х̅1 + ᾱ1α2ᾱ3х̅2х̅3 + α1ᾱ2ᾱ3х4х̅5 + α1ᾱ2ᾱ3х̅4
1.8 Построение логической схемы для автомата Мили
(см. Приложение А)
ГЛАВА 2. ПРОЕКТИРОВАНИЕ АВТОМАТА МУРА
2.1 Разметка ГСА для автомата Мура
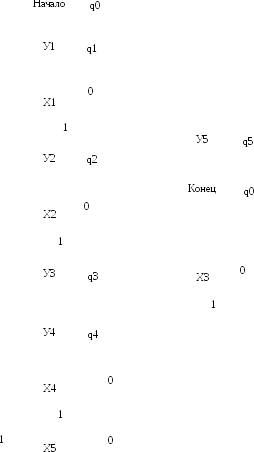
Рис.4. Разметка ГСА автомата Мура
2.2 Построение графа для автомата Мура
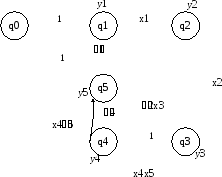
Рис.5. Граф автомата Мура
2.3 Построение таблицы переходов-выходов для автомата Мура
Табл.8. Таблица переходов-выходов для автомата Мура
|
Выходной сигнал |
Состояние автомата |
Входные сигналы | ||||||||
|
1 |
х1 |
х̅1 |
х2 |
х̅2х3 |
х̅2х̅3 |
х4х5 |
х4х̅5 |
х̅4 | ||
|
- |
q0 |
q1 |
|
|
|
|
|
|
|
|
|
у1 |
q1 |
|
q2 |
q5 |
|
|
|
|
|
|
|
у2 |
q2 |
|
|
|
q3 |
q4 |
q5 |
|
|
|
|
у3 |
q3 |
q4 |
|
|
|
|
|
|
|
|
|
у4 |
q4 |
|
|
|
|
|
|
q3 |
q5 |
q5 |
|
у5 |
q5 |
q0 |
|
|
|
|
|
|
|
|