-
Эргономика. Организация рабочего места.
Эргономика
– это научная дисциплина, комплексно
изучающая человека в конкретных условиях
его деятельности в современном
производстве. Эргономика занимается
разработкой оборудования, рабочих мест,
направленной на приспособление их к
возможностям человека с учетом его
антропометрических и психологических
особенностей. Объект исследования
эргономики – система «человек –
машина – среда обитания».
Человек в системах
безопасности выполняет троякую роль:
является объектом защиты; выступает
средством обеспечения безопасности;
сам может быть источником опасностей.
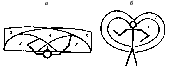
Антропометрическая совместимость
- учет размеров тела человека,
возможности обзора внешнего
пространства, положения (позы)
оператора в процессе работы. Рабочая
поза «стоя» (а) - большие энергозатраты
и менее устойчива из-за поднятого центра
тяжести - быстро наступает утомление.
Рабочая поза «сидя» (б) - резко
понижается высота центра тяжести,
возрастает устойчивость тела, сокращаются
энергозатраты - является менее
утомительной. Прямая поза «сидя»
мышечная работа = 1,
прямая поза «стоя» мышечная работа
= 1.6, наклонная поза «сидя» (г)
= 4, наклонная поза «стоя» (в) = 10.
Правильная Рабочая поза – проекция
центра тяжести лежит в пределах площади
опоры, органы управления в пределах
оптимальных зон достижения рук и зоны
контроля взглядом, информация в
оптимальном поле зрения. При работе
небольшой группы мышц - предпочтительнее
поза «сидя», При работе задействована
большая группа мышц – предпочтение
поза «стоя».
с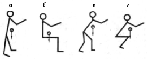
-
Зоны размещения органов управления.
В процессе управления человек обязательно должен прилагать некоторые усилия, так как отсутствие их (что может быть, например, при кнопочном управлении) дезориентирует человека, лишает его уверенности в правильности своих действий, а излишние усилия приводят к биомеханической перегрузке.
Например, для предотвращения дрожания руки и повышения точности движений требуется момент сопротивления рукоятки в пределах З...16,7 Н∙м.
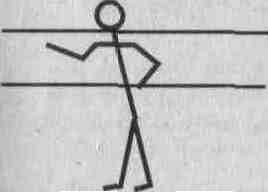
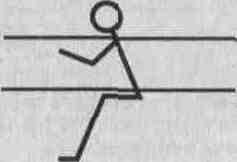
Форма и размеры органов управления должны быть согласованы с размерами и биомеханическими особенностями руки оператора. Органы управления могут быть ручными и ножными. Ножные органы управления используют тогда, когда требуются большие усилия и небольшая точность: включение — выключение, грубая регулировка напряжения или тока и т.п. При ручном управлении максимальные усилия прилагаются к рычагам, которые захватываются стоящим оператором на уровне плеча, а сидящим — на уровне локтя (рис. 15), поэтому органы управления, которые используются наиболее часто, следует располагать на высоте между локтем и плечом.
.
 а
а
 б
б
Рис. 15. Зона размещения органов управления: а – поза «стоя»; б – поза «сидя»
Оптимальные усилия на органы управления:
-
для рукояток 20...40 Н (100 Н —максимальное);
-
для кнопок, тумблеров, переключателей легкого типа 1400...1600 мН, тяжелого – 6...12 Н;
-
для ножных педалей управления от 20...50 (используемых часто) до 300 Н (используемых редко);
-
для рычажного управления от 20...40 (используемых часто) до 120... 160 Н (используемых редко).
Диапазон скоростей, развиваемых движущимися руками человека, находится в пределах 0,01...8000 см/с. Наиболее часто используются скорости порядка 5...800 см/с. Следует иметь в виду, что движения руки к себе более быстрые, но менее точные, тогда как от себя — более точные, но менее быстрые. Скорость движения в вертикальной плоскости больше, чем в горизонтальной; сверху вниз больше, чем снизу вверх; вперед-назад больше, чем вправо-влево; слева направо для правой руки больше, чем справа налево для левой. Вращательные движения в 1,5 раза быстрее поступательных.
МОТОРНОЕ ПОЛЕ — пространство рабочего
места оператора, где размещены органы
управления и осуществляется (оператором)
управление системой «человек — машина».
Зона 1- для точных и мелких сборочных
работ, в ней работают обе руки и хорошо
осуществляется зрительный контроль.
Зоны 2 и 3 хорошо доступны для одной и
мало доступны для другой руки, а зрительный
контроль осложнен. В этих зонах удобно
размещать органы управления, зрительный
контроль за которыми не требуется
постоянно.Зона 4 – труднодоступная. В
ней могут быть размещены инструменты
и материалы, которые не поместились в
зонах 2 и 3. Зона 5 (6) доступна только для
правой (левой) руки - здесь можно разместить
органы управления, которыми пользуются
«не глядя». Оптимальная высота рабочей
поверхности: