

лаб_р
.pdfЛАБОРАТОРНАЯ РАБОТА № 11
Отчет
Определение главных напряжений при плоском напряженном состоянии
Цель работы:……………………………………………………………………..….. …….…………….…………………………………………….……………………… Испытательная машина………………………………………………………………
Измерительные приборы……………..……………………………………………..
Схема нагружения
|
|
|
lС =………см, |
|
С |
||
|
|
|
l = ……….см. |
|
|
|
|
P1 |
lС |
||
l l
P2
Измерительные приборы………………………………………………………..
Цена деления прибора Kε = …………………..
Данные о цилиндре:
наружный диаметр D =………..мм, внутренний диаметр d = …………..мм,
α = Dd =……….,
модуль упругости E = ………….ГПа,
коэффициент Пуассона μ = …………
91

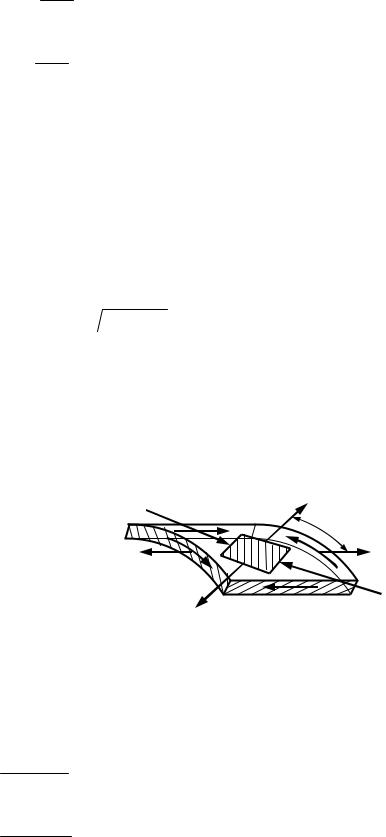
Схема наклейки тензорезисторов
|
|
|
u |
σ3 |
|
|
|
|
|
|
|
|
|
σ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
αo |
|
|
||
x |
|
|
|
x |
||||
|
|
|
|
|
45° |
|
||
|
|
|
φ0 |
90° |
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
v |
|
|
|
||
|
|
|
|
|
|
|
|
|
Таблица наблюдений
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсчёты показаний тензорезисторов |
|
|||||||||
|
Нагрузка, Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
№ |
|
|
|
|
Датчик v |
|
|
|
|
Датчик x |
|
Датчик u |
|
||||||||||
|
|
|
|
|
|
|
|
|
канал № 1 |
|
|
|
|
канал № 2 |
|
канал № 3 |
|
||||||
|
P1 |
|
P2 |
|
|
n1 |
|
|
|
|
|
n1 |
|
|
|
n2 |
|
n2 |
n3 |
|
n3 |
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
= |
|
Н |
|
|
nvср= |
|
|
|
|
|
|
|
|
nxср= |
|
nuср= |
|
|||||
P2 = |
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ε = Kε ncp |
|
εv = |
|
|
|
|
|
|
|
|
εx = |
|
εu = |
|
|||||||||
|
Главные деформации |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ε |
= |
εu +εv |
± |
|
1 |
(ε |
x |
−ε |
)2 |
+(ε |
x |
−ε |
)2 =…………………….=………. |
|||||||||
|
|
|
|||||||||||||||||||||
1,3 |
2 |
|
|
2 |
|
|
|
u |
|
|
|
v |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ε1 |
=………….., ε3 =…………… |
|
|
|
|
|
|
|
|
|||||||||||||
Главные напряжения
σ1оп =1−Eμ2 (ε1 +μ ε3 )=………………..=…………МПа;
σ3оп =1−Eμ2 (ε3 +μ ε1)=………….……..=…………МПа.
92
Моменты сопротивления сечения цилиндра
Wp = π16D3 (1−α4 )=…………………….=………см3;
W = π32D3 (1−α4 )=…………..……….=………см3.
Теоретические напряжения |
|
|
|
|
Мk =( P1 + |
P2 ) l =……………..=…………Н м; |
|||
МС = ( P2 − |
P1) lС =……………..=…………Н м; |
|||
τ = Mk =……..=……МПа; |
σ = |
MС |
=……..=……МПа. |
|
|
||||
W |
|
|
W |
|
P |
|
|
|
|
Теоретические главные напряжения
σ1,3 = σ2 ± 12  σ2 + 4τ2 =……………………………=…………. МПа;
σ2 + 4τ2 =……………………………=…………. МПа;
σ1=…………….МПа; σ2=…………….МПа.
Характер напряженного состояния в точке C
1 |
σ3 |
|
|
2 |
σ1 |
|
|
|
α0 |
||
|
|
|
|
|
|
σ |
τ |
|
|
σ |
|
|
|
|
3 |
||
|
|
|
|
|
|
|
σ |
1 |
4 |
τ |
σ3 |
|
|
|
|
||
Сопоставление теоретических и опытных напряжений
σ1 −σ1оп 100% =………………………………….=………..%
σ1
σ3 −σ3оп 100% =………………………………….=………..%
σ3
93

Опытное значение угла, определяющего направление максимального главного напряжения:
tg 2ϕ0 = 2εx −εu −εv =………………………………=…………..;
εu −εv
ϕ0 =……………….; α0(оп) = 450−ϕ0 =………….=……….
Тот же угол, найденный по теоретической формуле: tg 2α0 = 2στ =……………………=……….;
α0 =………………….
Сопоставление теоретического и опытного значений угла:
α0 −α0(оп) 100% =………………………………..=………………..%
α0
Выводы по работе…………………………………………………….……….……..
………………………………………………………………………….………....……
………………………………………………………………………….……...……….
………………………………………………………………………….………...…….
Отчет принял
……………………………..
94
ЛАБОРАТОРНАЯ РАБОТА № 12 Опытная проверка теоремы о взаимности работ.
Теорема Бетти
Цель работы: экспериментальная проверка теоремы о взаимности работ.
Общие сведения
Теорема о взаимности работ относится к числу общих теорем сопротивления материалов. Эта теорема вытекает из принципа независимости действия сил иприменимаковсемсистемам, длякоторыхсоблюдаетсяэтотпринцип.
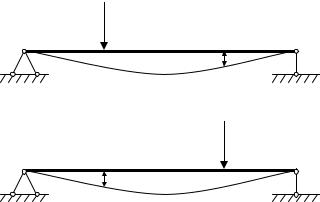
Рассмотрим упругую балку на двух опорах в двух состояниях (рис.1). В первом состоянии балка нагружена силой Pi в сечении i (рис. 1, а), а во втором – силой Pk в сечении k (рис. 1, б).
а |
i Pi |
|
k |
I состояние |
|
|
|
|
ki |
|
|
б |
i |
k |
Pk |
|
|
|
|
II состояние |
|
||
|
|
|
|
|
|
|
ik |
|
|
|
|
|
|
Рис. 1 |
|
|
|
Точка «k» под действием силы Pi (I состояние) получит перемещение |
ki, |
||||
а точка «i» под действием силы Pk |
(II состояние) |
получит перемещение |
ik. |
||
Применительно к указанным видам нагружения теорема о взаимности работ запишется следующим образом:
Pi ik = Pk ki |
(1) |
95

Теорема формулируется следующим образом: возможная работа силы
первого состояния Pi на перемещении |
ik по ее |
направлению, вызванному силой |
второго состояния, равна возможной |
работе |
силы второго состояния Pk на |
перемещении |
ki по ее направлению, вызванному силой первого состояния. |
|||||||||
Эта теорема приобретает большую общность, если учесть, что под силами |
||||||||||
Pi и Pk можно понимать обобщенные силы, а под ik, |
ki – обобщенными |
|||||||||
перемещениями. |
|
|
|
|
|
|
||||
Приложим во II состоянии балки сосредоточенный момент Mk (рис. |
2, б), |
|||||||||
тогда вместо |
линейного перемещения ki необходимо |
рассматривать |
угол |
|||||||
поворота ϕki (рис. 2, а). |
|
|
|
|
|
|
||||
|
|
|
ϕki |
|
|
|
|
|
|
|
|
а |
i |
Pi |
I состояние |
|
|||||
|
|
К |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
б |
|
Мk |
k Pk |
|
К |
i |
|
|
|
II состояние |
|
|
|
|
|
|
|
|
ik |
|
|
|
Рис. 2 |
Теорема о взаимности работ запишется в этом случае так:
Pi |
ik = Mk ϕki |
(2) |
Опытная проверка теоремы о взаимности работ по формуле (2) |
||
проводится на балке, имеющей |
консоль длиной «a» |
на правом конце |
и вертикальный стержень длиной «b» на левой опоре (рис. 3). Вертикальный стержень «b» жестко связан с балкой и перпендикулярен к ней.
96
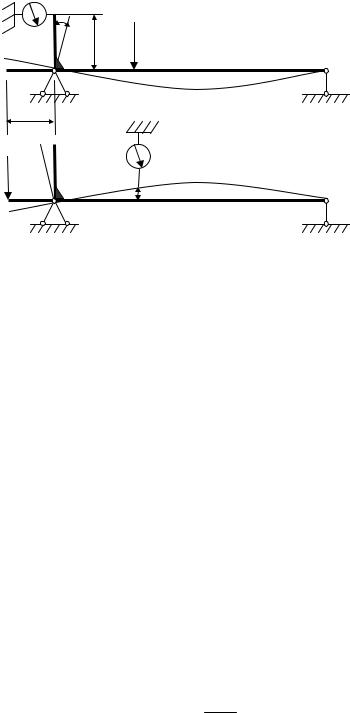
а |
ϕ ki |
|
|
|
b |
Pi |
|
С |
i |
I состояние |
|
|
a |
|
|
б |
P |
|
|
|
|
|
|
С |
i |
ik |
II состояние |
|
|
|
|
|
|
|
Рис. 3 |
Порядок выполнения работы
1.Замерить длину консоли «a» и расстояние «b» между осью балки и острием индикатора (рис. 3, а).
2.В ненагруженном состоянии балки записать показание nk0 по шкале индикатора, установленного на стержне «b».
3.Подвесить груз Pi в сечении i и записать новое показание nk1 индикатора.
4.Вычислить разность показаний индикатора для нагруженного и
ненагруженного состояний балки nk = nk1 − nk0. 5. Определить угол поворота сечения «k» −
ϕki = bnk ,
так как tgϕki≈ϕki ввиду малости угла.
6. В ненагруженном состоянии балки записать показания ni0 по шкале индикатора, установленного в сечении «i».
7. Приложить в сечении А груз P, который образует момент Мк = Р а и записать новое показание индикатора ni1.
97
8. Вычислить разность показаний индикатора:
ik = ni = ni1 − ni0.
9.Определить величины произведений Pi ik и Мк ϕki.
10.Определить процент расхождения между указанными величинами.
11.Оформить отчет по прилагаемой форме.
98
ЛАБОРАТОРНАЯ РАБОТА № 12
Отчет
Опытная проверка теоремы о взаимности работ. Теорема Бетти
Цель работы:……………………………………………………………………..….. …….…………….…………………………………………….………………………
Измерительные приборы…………………………………………………..
Схема нагружения балки и расположения приборов
I состояние |
II состояние |
Длина консоли a = ……………см. Длина стержня b = ……………см.
Результаты опыта |
|
|
|
I состояние |
II состояние |
|
|
Нагрузка Pi = ……..Н |
Нагрузка P = ……..Н |
||
Показания индикатора «k» |
Момент |
Мк = Р а |
|
|
|
=……..кН м |
|
nk0 =…………… |
|
|
|
nk1 =…………… |
Показания индикатора «i» |
||
nk =…………... |
ni0 =…………… |
|
|
Угол поворота сечения «k» |
ni1 =…………… |
|
|
ϕki = nk =………………… |
ni =…………... |
|
|
b |
Перемещение сечения i |
|
|
|
ik =………см =……….м |
|
99 |
Величина возможных работ
Аik = PiΔik =…………………………. Аki = Мкϕki =…………………………
Расхождение между возможными работами:
δ = Αik −Αki 100% =………………..%
Αik
Выводы по работе…………………………………………………….……….……..
………………………………………………………………………….………....……
………………………………………………………………………….……...……….
………………………………………………………………………….………...…….
Отчет принял
……………………………..
100