


ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Определение четырехполюсника. Классификация четырехполюсников. Системы уравнений четырехполюсника. Входное сопротивление четырехполюсника.
Определениечетырехполюсника.
Для передачи информации с помощью электромагнитной энергии (волн, сигналов в электрических схемах) применяются различные устройства (рис. 14.1), имеющие два входных (первичных) зажима и два выходных (вторичных). К входным зажимам подключается источник электрической энергии, к выходным присоединяется нагрузка. Такие устройства называются че-
тырехполюсниками.
Четырехполюсниками являются фильтры, трансформаторы, усилители, каскады радиопередатчиков и радиоприемников, линии связи и т. д.
|
|
|
|
I1′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Zi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZН |
Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
|
|
|
|
|||
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Классификациячетырехполюсников.
Четырехполюсники бывают активные и пассивные. В активном четырехполюснике есть источники энергии, в пассивном − источников энергии нет. Примерами активных четырехполюсников являются усилители, каскады радиопередатчиков и радиоприемников и др. Примером пассивного четырехполюсника может служить кабельная или воздушная линия связи, электрический фильтр и др.
Четырехполюсники делятся на линейные и нелинейные. Четырехполюсник является линейным, если напряжение и ток на его выходных зажимах линейно зависят от напряжения и тока на входных зажимах. Примерами линейных четырехполюсников являются линии связи, фильтры, примерами не-
Основы теории цепей. Конспект лекций |
-120- |
ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Классификация четырехполюсников
линейного – выпрямитель, детектор, преобразователь частоты в радиоприемнике.
Четырехполюсники могут быть симметричными и несимметричными.
Четырехполюсник симметричен, если перемена местами входных и выходных зажимов не изменяет токов и напряжений в цепи, с которой четырехполюсник соединен. В противном случае четырехполюсник несимметричен.
Четырехполюсники бывают автономными и неавтономными. На зажимах автономного четырехполюсника остается напряжение, обусловленное наличием внутренних источников, т. е. такой четырехполюсник обязательно является активным. В противном случае четырехполюсник пассивен.
Различают также обратимые и необратимые четырехполюсники. В обратимых четырехполюсниках отношение напряжения на входе к току на выходе (передаточное сопротивление) не зависит от того, какая пара зажимов является входной, а какая выходной. В противном случае четырехполюсник необратим.
Системыуравненийчетырехполюсника.
Основной задачей теории четырехполюсников является установление соотношений между напряжениями на входе и выходе и токами, протекаю-
щими через входные и выходные зажимы. Вариант с токами I1, I2 (рис. 14.1)
называют прямой передачей, а I1′, I2′ – обратной. Очевидно, что
I1 = −I1′, I2 = − I2′.
Две из четырех величин, определяющих режим четырехполюсника, можно рассматривать как заданные воздействия, две оставшиеся – как отклики на эти воздействия. Таким образом, соотношения между токами и напряжениями на входе и выходе четырехполюсника могут быть записаны в виде шести систем уравнений.
1. Токи на входе и выходе выражаются в зависимости от напряжений на входных и выходных зажимах:
I1 =Y11U1 +Y12U2 ,
I2′ =Y21U1 +Y22U2.
Коэффициенты Y11, Y12 , Y21, Y22 называются Y-параметрами и являются
комплексными проводимостями. Действительно,
Основы теории цепей. Конспект лекций |
-121- |

ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Системы уравнений четырехполюсника
Y |
= |
|
I1 |
|
|
|
|
|
– комплексная входная проводимость при коротком замы- |
|
|
|
|||||||||
11 |
U1 |
|
|
|
|
|
||||
|
|
U2 =0 |
||||||||
|
|
|||||||||
кании выходных зажимов. |
||||||||||
Y |
= |
I2′ |
|
|
– комплексная входная проводимость со стороны зажимов |
|||||
|
|
|||||||||
|
||||||||||
22 |
|
U2 |
|
|
||||||
|
|
U |
=0 |
|||||||
|
1 |
|||||||||
(2–2) при коротком замыкании входных зажимов.
Y |
= |
I1 |
|
|
– комплексная передаточная (взаимная) проводимость при |
|
|
||||||
12 |
U2 |
|
|
|||
|
|
U =0 |
|
|||
|
|
1 |
|
|||
коротком замыкании входных зажимов.
Y |
= |
|
I2′ |
|
|
|
– комплексная передаточная (взаимная) проводимость при |
|
|
|
|
|
|||||
U |
||||||||
21 |
|
|
|
|
||||
|
|
|
1 |
|
U2 |
=0 |
||
|
|
|
|
|||||
коротком замыкании выходных зажимов.
В случае обратимого четырехполюсника Y12 =Y21. Если четырехполюсник симметричен, то Y11 =Y22 и его свойства определяются только двумя па-
раметрами (например, Y11, Y12 ).
2. Напряжения на входе и выходе выражаются в зависимости от токов, протекающих через входные и выходные зажимы:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
= Z11I1 + Z12I2 , |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= Z |
I |
+ Z |
|
I′. |
|
|
|
|
|
|
|
|
|
|
|
|
U |
22 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
21 1 |
|
2 |
|
Z |
= |
U1 |
|
|
|
|
|
|
– входное сопротивление со стороны зажимов (1–1) при ра- |
||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
||||||||||||
11 |
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
I2′ =0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||||||
зомкнутых выходных зажимах. |
|
|
|
|
|
||||||||||||
Z |
= |
U1 |
|
|
|
– передаточное (взаимное) сопротивление при разомкну- |
|||||||||||
|
|
|
|
|
|||||||||||||
12 |
|
|
|
|
I2′ |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
I |
=0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
тых зажимах (1–1). |
|
|
|
|
|
||||||||||||
Z21 |
= |
U2 |
|
|
– передаточное (взаимное) сопротивление при разомкну- |
||||||||||||
|
I1 |
|
|
||||||||||||||
|
|
|
|
|
|
I2′ =0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
тых зажимах (2–2). |
|
|
|
|
|
||||||||||||
Z22 |
= |
U2 |
|
|
– входное сопротивление со стороны зажимов (2–2) при |
||||||||||||
|
|
||||||||||||||||
I2′ |
|
I |
|||||||||||||||
|
|
|
|
|
|
=0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
разомкнутых зажимах (1–1).
Основы теории цепей. Конспект лекций |
-122- |

ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Системы уравнений четырехполюсника
В случае обратимого четырехполюсника Z12 = Z21 . Если четырехполюсник симметричен, то Z22 = Z11 и его свойства определяются только двумя параметрами (например, Z11, Z12 ).
3. В случае, когда четырехполюсник выполняет роль промежуточного звена между источником сигнала и сопротивлением нагрузки, заданными яв-
ляются напряжение и ток на выходе (U2 , I2 ), а искомыми величины, характеризующие режим на входе четырехполюсника (U1, I1 ). Связь между вход-
ными и выходными напряжениями и токами устанавливает система параметров прямой передачи:
U1 = A11U2 + A12I2 ,
I1 = A21U2 + A22I2.
A |
= |
|
U1 |
|
|
|
|
|
|
|
– отношение напряжений в режиме холостого хода на выходе. |
|||||||
|
|
|
|
|
|
|
|
|||||||||||
11 |
U2 |
|
|
|
|
|
||||||||||||
|
|
|
|
I2 =0 |
|
|||||||||||||
|
|
|
||||||||||||||||
A |
= |
|
|
I1 |
|
|
|
– величина, обратная передаточному сопротивлению в режиме |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||
21 |
|
|
U2 |
|
|
|
||||||||||||
|
|
|
|
I2 =0 |
|
|||||||||||||
|
|
|
|
|||||||||||||||
холостого хода на выходе. |
||||||||||||||||||
A |
= |
U1 |
|
|
|
|
|
– величина, обратная передаточной проводимости в режиме ко- |
||||||||||
|
|
|
||||||||||||||||
12 |
|
|
|
|
I2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
U2 =0 |
|
|||||||||||
|
|
|
|
|
|
|||||||||||||
роткого замыкания на выходе. |
||||||||||||||||||
A |
= |
I1 |
|
|
|
– отношение токов в режиме короткого замыкания на выходе. |
||||||||||||
|
|
|
||||||||||||||||
|
||||||||||||||||||
22 |
|
|
|
|
I2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
U2 =0 |
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||
Найдем связь между A - и Y -параметрами. Из второго уравнения системы Y -параметров следует
I1 =Y11U1 +Y12U2 ,
I2′ =Y21U1 +Y22U2.
−I2 = I2′ =Y21U1 +Y22U2 , |
U1 |
= − |
Y22 |
U2 − |
1 |
I2 . |
|
|
|||||
|
|
|
Y21 |
Y21 |
||
Подставив последнее выражение в первое уравнение системы Y -па- раметров, получим:
Основы теории цепей. Конспект лекций |
-123- |

ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Системы уравнений четырехполюсника
I =Y |
|
− |
Y22 |
U |
|
− |
1 |
I |
|
|
+Y U |
= − |
Y11Y22 −Y12Y21 |
U |
|
− |
Y11 |
I |
|
. |
|
|
2 |
|
2 |
|
|
2 |
|
2 |
|||||||||||
1 11 |
|
Y21 |
|
Y21 |
|
12 2 |
|
Y21 |
|
Y21 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
И окончательно,
U |
1 |
= − |
Y22 |
U |
2 |
− |
1 |
I |
2 |
, |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
Y21 |
|
Y21 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Y11Y22 −Y12Y21 |
|
|
|
|
|
Y11 |
|
|
|
|||||||
I = − |
U |
2 |
− |
I |
2 |
. |
||||||||||||||
|
|
|||||||||||||||||||
|
1 |
|
|
|
Y21 |
|
|
|
|
|
|
Y21 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Следовательно,
A = − |
Y22 |
, |
A = − |
1 |
, |
A = − |
Y11Y22 −Y12Y21 |
= − |
|
|
Y |
|
|
, |
A = − |
Y11 |
, |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
11 |
Y21 |
|
12 |
Y21 |
|
21 |
Y21 |
Y21 |
22 |
Y21 |
|
||||||
|
|
|
|
|
|
|
|||||||||||
где Y =Y11Y22 −Y12Y21 – определитель, составленный из Y -параметров. Определитель, составленный из A -параметров, равен:
A = A11A22 − A12 A21 = Y12 .
Y21
Для обратимого четырехполюсника Y12 =Y21 и A = A11A22 − A12 A21 =1.
4. Для анализа передачи сигнала от зажимов (2–2) к зажимам (1–1) используется система уравнений обратной передачи:
U2 = B11U1 + B12I1′,
I2′ = B21U1 + B22I1′.
Значения B -параметров определяются также из опытов холостого хода входной цепи (I1′ = 0) и короткого замыкания (U1 = 0).
5.Когда заданными являются комплексные амплитуды тока на входе I1
инапряжения на выходе U2 , искомые величины U1 и I2′ могут быть найдены из системы уравнений в H -параметрах:
Основы теории цепей. Конспект лекций |
-124- |
ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Системы уравнений четырехполюсника
U1 = H11I1 + H12U2 ,
I2′ = H21I1 + H22U2.
Значения каждого из H -параметров определяются из опытов короткого замыкания на выходе (U2 = 0) и холостого хода первичной цепи (I1 = 0).
6. В том случае, когда задаются величины U1 и I2 , ток на входе I1 и напряжение на выходе U2 определяются из уравнений в G -параметрах:
I1 = G11U1 +G12I2′,
U2 = G21U1 +G22I2′.
Входящие в эту систему уравнений G -параметры могут быть найдены из опытов холостого хода выходной цепи (I2′ = 0) и короткого замыкания на
входе (U1 = 0).
Поскольку все шесть систем параметров описывают один четырехполюсник, то они связаны между собой формулами пересчета, приведенными в справочных таблицах.
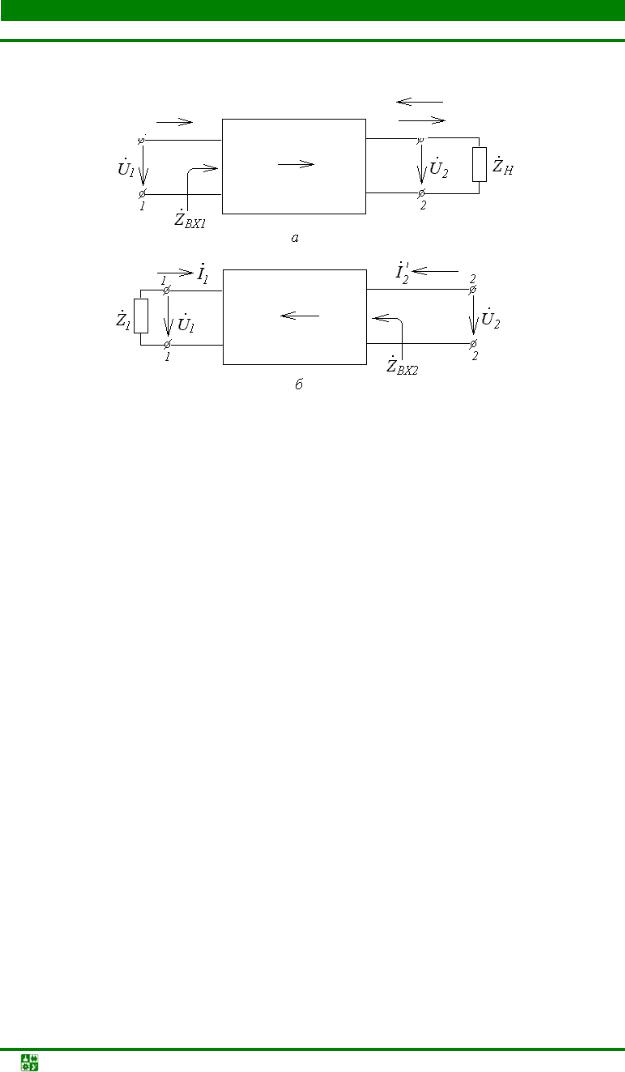
Входноесопротивлениечетырехполюсника.
Влияние четырехполюсника на режим цепи, с которой он соединен, оценивается входными сопротивлениями (рис. 14.2):
ZBX1 |
= |
U1 |
и ZBX2 |
= ZBЫХ = |
U2 |
. |
I1 |
|
|||||
|
|
|
|
I2′ |
||
На эти входные сопротивления оказывается нагруженным источник при передачи сигнала слева направо (рис. 14.2, а) и справа налево (рис. 14.2, б).
Входные сопротивления могут быть выражены через любую систему параметров четырехполюсника. Удобнее всего это сделать, воспользовав-
шись системой A -параметров. В этом случае
ZBX1 |
= |
U1 |
= |
A11U2 + A12I2 |
= |
A11ZH + A12 |
, где ZH =U2 / I2 . |
|
|
|
|||||
|
|
I1 |
A21U21 + A22I2 |
A21ZH + A22 |
|||
Основы теории цепей. Конспект лекций |
-125- |
ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Входное сопротивление четырехполюсника
|
I1 |
I2′ |
I2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZH |
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
ZВХ1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
|
||||
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZВХ2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.2
В случае перемены направления передачи сигнала (рис. 14.2, б) воспользуемся следующим приемом. Если в системе уравнений в A -параметрах заменить токи I1 на – I1′ и I2 на – I2′ и решить уравнения относительно U2 и I2′, то
получим уравнения в системе B -параметров, выраженные через A -коэф- фициенты. Тогда
ZBX2 |
= |
U2 |
= |
A22U1 + A12I1′ |
= |
A22Z1 + A12 |
, |
|
I2′ |
A21U11 + A11I1′ |
A21Z1 + A11 |
||||||
|
|
|
|
|
так как Z1 =U1 / I1′.
Выражения для входных сопротивлений могут быть представлены и в иной форме. Действительно,
|
|
|
A11 |
|
|
A12 |
|
+ ZH |
Z2K + ZH |
|
|
|
|
Z1K + Z1 |
|
|||||
|
|
|
|
|
A11 |
и Z |
|
= Z |
|
|
||||||||||
Z |
|
= |
|
|
|
|
= Z |
|
|
, |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
BX1 |
|
A |
|
|
A |
|
|
1X |
Z |
|
+ Z |
|
|
BX2 |
|
2X Z |
+ Z |
|
|
|
|
|
21 |
|
|
22 |
|
+ ZH |
|
2X |
|
H |
|
|
|
|
1X |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
A21 |
|
|
|
|
|
|
|
|
|
|
|
|||
Основы теории цепей. Конспект лекций |
-126- |

ЛЕКЦИЯ 14. ОСНОВЫ ТЕОРИИ ЧЕТЫРЕХПОЛЮСНИКОВ
Входное сопротивление четырехполюсника
где Z = |
A11 |
, |
Z = |
A12 |
– входные сопротивления в режиме холостого хода |
||||||
|
|
||||||||||
1X |
A21 |
|
1K |
A22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и короткого замыкания на выходе, Z2X = |
A22 |
, |
Z2K = |
A12 |
– входные сопротив- |
||||||
A21 |
A11 |
||||||||||
|
|
|
|
|
|
|
|
|
|||
ления в режиме холостого хода и короткого замыкания на входе.
Таким образом, четырехполюсник трансформирует сопротивление нагрузки в новое сопротивление, зависящее как от величины нагрузки, так и от параметров четырехполюсника.
Контрольныевопросы
1.По каким признакам классифицируются четырехполюсники?
2.Какие системы уравнений устанавливают соотношения между напряжениями на входе и выходе и токами, протекающими через входные и выходные зажимы четырехполюсника?
3.Что такое входное сопротивление четырехполюсника?
Основы теории цепей. Конспект лекций |
-127- |