

ПРАКТИКУМ ПО ДИСЦИПЛИНЕ ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
.pdfЗная ωAB, можно определить скорость любой точки звена АВ по модулю и направлению.
Определим скорость точки В. VВ = ωAB ВCVAB.
На схеме механизма ВCVAB = 20 мм. Истинное значение определим через масштаб длин ВCVAB = 20 · μl = 20 · 1 = 20 см.
Тогда VВ = 1,47 · 20 = 29,4 см/с.
Направляем вектор VВ перпендикулярно отрезку ВСVAB в сторону
угловой скорости ωAB. Рассматривая звено О2В, определим его угловую скорость вращения вокруг оси О2. Так как VВ = ωО2В О2В, то отсюда ωО2В = VВ/О2В = 29,4/41 = 0,71с-1. направление ωО2В показываем круглой стрелкой вокруг точки О3 в соответствии с направлением вектора VВ.
Далее рассмотрим следующее звено CD. Надо определить направление скоростей точек C и D. Точка С находится также на звене АВ. поэтому, соединяем точку С с мгновенным центром скоростей CVAB звена АВ и находим скорость по модулю по формуле VС = ωAB СCVAB.
Замеряем отрезок СCVAB = 36 мм на схеме, определяем истинное значение через масштаб длин СCVAB = 36 · ΜL = 36·1= 36 см.
Окончательно получим VС =1,47 · 36 = 52,9 см/с.
Вектор VС проводим из точки С перпендикулярно отрезку СCVAB,
направленному в сторону угловой скорости ωAB звена АВ.
Направление скорости точки D известно – это горизонтальная линия. Проводим теперь из точек С и D перпендикуляры к направлениям их скоростей, на пересечении которых определится положение мгновенного центра скоростей CVСD звена СD.
По аналогии с вышеизложенным найдем угловую скорость ωСD зве-
на СD ωСD = VС/СCVСD.
Измеряем на схеме СCVСD = 135 мм и через масштаб длин находим истинное значение СCVСD = 135· μl = 135 · 1 = 135 см и угловую скорость звена СD. ωСD = 52,9/135 =0,39 с-1.
Скорость точки D по модулю определится VD = ωСD DCVAB.
На схеме отрезок DCVСD = 139 мм и действительное значение его рав-
но DCVСD = 139 · = 139 · 1 = 139 см. Тогда VD = 0,39 · 139 = 54,2 см/с.
Вектор VD длиной 54,2/3 = 18 мм проводим из точки D вдоль гори-
зонтальной линии в сторону угловой скорости ωСD звена СD. И, наконец, рассмотрим звено EF.
Скорость точки E, находящейся на звене СD, по модулю и направле-
нию определим, соединив ее с мгновенным центром скоростей CVСD звена
СD VE = ωСD ECVCD.
61
Замеряем на схеме ECVCD = 130 мм. Истинное значение отрезка
ECVCD = 130· =130 · 1 = 130 см/с; VE =0,39 · 130 – 50,7 см/с.
Вектор VЕ направляем перпендикулярно отрезку ECVCD в сторону
угловой скорости ωСD звена СD.
Точка F принадлежит также звену EF, которое вращается вокруг неподвижной оси О3F. Значит, вектор VF как вращательная скорость направ-
лен перпендикулярно звену О3F. Проводим это направление из точки F. Затем из точек E и F проводим перпендикуляры к направлениям
скоростей этих точек до их пересечения в точке CVEF, которая является мгновенным центром скоростей звена EF.
Определяем теперь ωEF = VE/ ECVEF. Измеряем на схеме отрезок ECVEF = 46 мм. Находим действительное значение ECVEF = 46 · μL = 46 · 1 =
= 46 см. Подставляя значения, находим: ωEF = 50,7/46 = 1,1 с-1. Теперь определим по модулю скорость точки F: VF = ωEF · FCVEF.
Замеряем на схеме отрезок FCVEF = 37 мм, находим действительное значение FCVEF = 37 · μL = 37 · 1 = 37 см.
Затем определим VF = 1,1 · 37 = 40,7 см/с. Вектор VF направляем
перпендикулярно отрезку FCVEF в сторону угловой скорости звена EF. Рассмотрим звено О3F и определим его угловую скорость ωO3F, для
чего найдем скорость точки F как вращательную VF = ωO3F · О3F, откуда
ωO3F = VF/ О3F = 40,7/28 = 1,45 с-1.
Угловую скорость ωO3F изображаем круглой стрелкой вокруг точки О3, направляя ее в соответствии с найденным уже направлением вектора VF .
5. Графическое определение ускорений всех точек и угловых ускорений всех звеньев механизма
Для графического определения ускорений точек вычерчиваем схему механизма для заданного положения в масштабе μι = 1 см мм (рис. 2.11).
мм (рис. 2.11).
Выбираем масштаб ускорений согласно известным по модулю W nA и W τA .
μW = 10 см (с2 мм) .
(с2 мм) .
Графически определяем ускорение точки А по формуле:
WA = WAn + WAτ .
Модули ускорений WAn и WAτ известны (п. 2 примера выполнения задачи)
62

63
WAτ
μ = 1 см/мм
μll = 1см мм
ε O A |
ωO A |
ε CD |
WD |
1 |
1 |
|
|
|
ϕ |
WA |
|
|
|
|
WAn |
WE |
ε AB 
WC
W n |
|
|
B |
|
|
W |
WBτ |
WBAn |
B |
|
ε O B |
|
|
2 |
WBAτ
WA
|
|
ε EF |
|
|
|
|
|
|
|
|
|
|
|
|
|
ε O F |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WFn |
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
WF |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
FE |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
WE |
|
|
|
|
|
|
|
|
|
|
|
τ |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WDC |
||
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
FE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
Для точек А, В, С, Е |
|
|
Для точек D, F |
|
|||||||||||||||||||
μ |
= 1 см/(c2 |
2· мм) |
μ |
w |
= 5 см/(c22 |
· мм) |
|
|||||||||||||||||
|
wμW = 10см с |
мм |
|
|
μW |
= 5см с |
мм |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WC
WDCn
Рис. 2.11. Графическое определение ускорений всех точек и угловых ускорений всех звеньев механизма

В выбранном масштабе откладываем вектор WAn , направляя его от точки А к неподвижной точке О1, и вектор WAτ , проводя его перпендикулярно вектору WAn (или WAτ O1A ) в направлении углового ускорения εO1 A
звена О1А.
Вектор WA найдется как диагональ параллелограмма (в данном случае прямоугольника), построенного на векторах WAn и WAτ как на сторонах.
Модуль ускорения точки А найдется через масштаб ускорений μW
WA = μW · AA1= 10 · 58,5 = 585 см с2 .
с2 .
Принимая точку А за полюс, определим ускорение точки В при помощи теоремы об ускорениях точек плоской фигуры:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n + W |
τ . |
(4) |
||||||
|
|
|
|
W |
|
|
= W |
A |
+ W |
|||||||||||||||
|
|
|
|
|
B |
|
|
|
BA |
|
BA |
|
||||||||||||
Ускорение точки В можно определить по формуле |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
τ. |
|
|
|
|
(5) |
||
|
|
|
|
|
W |
= W |
+ W |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
B |
|
B |
|
|
|
|
|
B |
|
|
|
|
|
||||
С учетом зависимости (5) выражение (1) принимает вид |
|
|||||||||||||||||||||||
|
|
|
n + W |
τ = W |
|
|
|
|
n |
|
|
τ . |
(6) |
|||||||||||
|
W |
A |
+ W |
+ W |
||||||||||||||||||||
|
|
|
B |
|
|
B |
|
|
|
|
|
BA |
|
|
BA |
|
||||||||
Определим модули тех ускорений выражения (6), которые могут |
||||||||||||||||||||||||
быть вычислены |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W n = ω2 |
· О2В = 0,732 · 41 = 22 см с2 ; |
|
||||||||||||||||||||||
B |
O B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W n |
= ω2 |
· АВ = 1,472 · 63 = 136 см с2 . |
|
|||||||||||||||||||||
BA |
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В выбранном масштабе строим многоугольник ускорений согласно зависимости (6). Согласно правой части уравнения (6) от точки В отклады-
ваем вектор ускорения WA , из конца которого проводим вектор WBAn , известный по модулю и направленный параллельно звену АВ к полюсу В. Из конца вектора WBAn проводим прямую перпендикулярно звену АВ, соответ-
ствующую направлению вектора WBAτ , модуль которого неизвестен. Согласно левой части уравнения (6) из точки В откладываем вектор
WBn , известный по модулю и направленный вдоль О2В к оси О2. Из его конца проводим прямую перпендикулярно звену О2В, которая соответствует направлению неизвестного по модулю вектора WBτ, до пересечения с прямой, соответствующей направлению вектора WBAτ .
64

Полученную точку пересечения В1 соединяем с точкой В. Найденный
вектор BB1 геометрически равен вектору WB , т. е. WB = BB1. Измеряя его длину (ВВ1 = 28,5 мм) и умножая на масштаб ускорений µW , вычисляем модуль ускорения точки В:
WB = BB1 µW =10 28,5 = 285 см с2 .
с2 .
Из построенного многоугольника ускорений, измерив длины неизвестных по модулю ускорений WBAτ и WBτ и умножив на масштаб µW , найдем:
WBAτ = 555 см с2 .
с2 .
WBτ = 285 см с2 .
с2 .
Зная, что модули WBAτ и WBτ вычисляются по формулам
W τ |
= ε |
AB |
· АВ ; |
W τ= ε |
O B |
· О2В, |
BA |
|
|
B |
|
||
|
|
|
|
|
2 |
|
определим угловые ускорения звеньев:
|
|
|
Wτ |
|
|
|
555 |
|
-2 |
|
||||
ΕAB |
= |
|
|
BA |
|
= |
|
|
= 8,8 c |
; |
||||
|
AB |
63 |
||||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
Wτ |
|
|
|
|
285 |
|
-2 |
|
|
|||
ΕO B = |
|
|
|
B |
|
|
= |
|
|
= 6,95 c |
. |
|
||
|
O2B |
41 |
|
|||||||||||
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Направление угловых ускорений εAB и εO2 B определим по направле-
нию найденных ускорений WBAτ и WBτ соответственно и обозначим круг-
лыми стрелками вокруг звеньев АВ и О2В.
Найдем ускорение точки С, используя известное свойство: концы ускорений точек неизменяемого отрезка лежат на одной прямой и делят её на части, пропорциональные расстояниям между этими точками.
С этой целью соединим концы векторов ускорений точек А и В отрезком А1В1. На этом отрезке должен лежать конец вектора ускорения точки С. Положение конца вектора ускорения точки С на этой прямой определяется из соотношения
AB |
= |
A1B1 |
, откуда A C = |
AC A B . |
|||
AC |
A C |
||||||
|
1 1 |
AB 1 1 |
|||||
|
|
1 |
1 |
|
|
||
Измерив на чертеже отрезок A1B1 = 97,5 мм, получим: |
|||||||
АС = 42 97,5 = 65 мм. |
|
||||||
1 |
1 |
63 |
|
|
|
||
|
|
|
|
|
|||
65

Откладывая от точки А1 отрезок А1С1 и соединяя точку С1 с точкой С, находим WC – вектор ускорения точки С. Измеряя его длину СС1 = 31,5 мм и умножая на масштаб ускорений μw , получаем модуль ускорения точки С.
|
|
|
|
|
|
W |
= CC μ |
w |
= 10 31,5 = 315 см с2 . |
|
||||||||||||||
|
|
|
|
|
|
C |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Ускорение точки D найдем аналогично определению ускорения точ- |
|||||||||||||||||||||
ки В, принимая при этом за полюс точку С: |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
τ |
, |
(7) |
||||
|
|
|
|
|
|
|
|
W |
= W |
|
+ W |
+ W |
||||||||||||
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
C |
DC |
|
DC |
|
|
|||||
где |
|
|
|
|
n |
– нормальное ускорение точки D во вращательном движении во- |
||||||||||||||||||
W |
||||||||||||||||||||||||
|
|
|
|
DC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
круг полюса С; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
τ |
– касательное ускорение точки D во вращательном движении |
||||||||||||||||||||
|
W |
|||||||||||||||||||||||
|
|
|
DC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вокруг полюса С. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Вычислим модуль ускорения |
|
n |
|
|
|
|
|
|
||||||||||||||||
W |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
||
|
|
|
|
|
|
W n |
= ω2 |
|
CD = 0,4082 92 = 15,3 см с2 . |
|
||||||||||||||
|
|
|
|
|
|
|
DC |
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как модуль ускорения W n |
значительно меньше модуля ускоре- |
||||||||||||||||||||
ния |
|
|
|
WC , то увеличим |
|
|
|
|
|
|
DC |
|
|
|
|
|
|
|||||||
|
|
|
масштаб |
ускорений для точки |
D до |
|||||||||||||||||||
μW = 5 см (с2 мм) . Поэтому, чтобы не загромождать чертеж, в соответ-
(с2 мм) . Поэтому, чтобы не загромождать чертеж, в соответ-
ствии с векторным равенством (7) строим многоугольник ускорений для точки D в выбранном масштабе вне механизма (рядом с ним).
Поскольку точка D движется вдоль горизонтальных направляющих, то ускорение ее направлено по горизонтальной прямой. Проведем эту прямую. Затем от точки D откладываем вектор найденного ускорения WC в новом масштабе. Из его конца проводим известный по модулю вектор WDCn параллельно звену CD, направляя его к полюсу С. Из конца вектора
WDCn проводим прямую перпендикулярно звену CD, что соответствует направлению неизвестного по модулю ускорения WDCτ . Точка пересечения D1 этой прямой с горизонтальной прямой, проведенной из точки D, определит вектор DD1 , который геометрически равен вектору ускорения WD . Измерив его, вычислим через масштаб ускорений модуль ускорения точки D
WD = DD1μW = 5 6 = 30 см с2 .
с2 .
Аналогично, измерив длину вектора WDCτ , найдем:
WDCτ μW = 5 65 = 325 см с2 .
с2 .
66

Угловое ускорение звена CD найдем по формуле
ΕCD = WDCτ ; εCD = 325 = 3,53 c−2 .
CD 92
Направление углового ускорения εCD определим согласно направлению вектора WDCτ и покажем круглой стрелкой вокруг звена CD.
Найденный вектор WD в уменьшенном (прежнем) масштабе
μW = 10 см (с2 мм) приложим к точке D механизма.
(с2 мм) приложим к точке D механизма.
Ускорение точки Е звена CD найдем по аналогии с определением ускорения точки С, используя свойство ускорений точек, лежащих на одной прямой. Соединим концы векторов ускорений точек C и D отрезком C1D1. Положение конца вектора ускорения точки Е найдем из соотношения
|
|
|
|
CD = C1D1 |
, откуда |
|
|||||||||||
|
|
|
|
CE |
C E |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
C E = CE C D . |
|
|
|
|
|||||||||
1 |
1 |
|
CD |
1 1 |
|
|
|
|
|
||||||||
|
|
|
Отрезок C1D1 измеряем на чертеже (C1D1 = 86 мм) и вычисляем |
|
|||||||||||||
|
|
|
|
C E = 46 86 = 43 мм. |
|
||||||||||||
1 |
1 |
|
92 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отложив C1E1 от точки C1 |
и соединив точку Е1 с точкой Е, найдем |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WE = EE1 . Измеряя отрезок ЕЕ1 = 15 мм, определим: |
|
||||||||||||||||
|
|
|
|
W = μw ЕЕ1 = 10·15 = 150 м/с2. |
|
||||||||||||
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приняв точку Е за полюс, ускорение точки F найдем по формуле: |
|
|||||||||||||
|
|
|
|
|
|
|
= |
|
+ |
|
n |
+ |
|
τ , |
(8) |
||
|
|
|
|
|
W |
W |
W |
W |
|||||||||
|
|
|
|
|
|
F |
|
E |
|
FE |
|
FE |
|
||||
где WFEn – нормальное ускорение точки F во вращательном движении вокруг полюса Е,
WFEτ – касательное ускорение точки F во вращательном движении во-
круг полюса Е.
Точка F также принадлежит звену O3F, которое вращается вокруг неподвижной оси, проходящей через точку О3. В этом случае ускорение
точки F определяется по известной формуле |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
n + W |
τ . |
(9) |
|||||
|
|
|
W |
= W |
||||||||||||
|
|
|
|
|
F |
|
|
F |
|
F |
|
|||||
С учетом (9) зависимость (8) примет вид |
|
|||||||||||||||
|
|
n + W |
τ = W |
|
|
n |
|
|
τ . |
(10) |
||||||
W |
+ W |
+ W |
||||||||||||||
|
F |
F |
E |
FE |
|
FE |
|
|||||||||
Вычислим модули ускорений, данные для которых имеются
67

WFn = ωO2 3 FO3F = 1,3932 28 = 54 см с2 ;
с2 ;
WFEn = ω EF2 EF = 1,032 48 = 51 см с2 .
с2 .
Построим при точке F в увеличенном масштабе μW = 5 см (с2 мм)
(с2 мм)
многоугольник ускорений согласно зависимости (10).
Согласно правой части уравнения (10) от точки F механизма отложим вектор ускорения полюса WE в выбранном масштабе. Из конца этого век-
тора проведем вектор WFEn параллельно звену EF, направив его к полюсу Е, а из конца вектора WFEn перпендикулярно звену EF проведем прямую,
по которой направлен вектор ускорения WFEτ . Затем согласно левой части уравнения (10), отложим от точки F известный по модулю вектор ускорения WFn , направляя его вдоль звена O3F к неподвижной точке О . Из конца вектора WFn проводим прямую перпендикулярно звену O3F , соответст-
вующую направлению вектора WFτ до пересечения с ранее проведенной перпендикулярно звену EF прямой. Соединяя полученную точку пересечения этих прямых F1 с точкой F, определяем вектор ускорения WF точки F,
т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 13 мм), найдем модуль |
WF = FF1 . Измерив длину этого вектора ( |
|
WF |
|
|||||||||||||||||||||||||
вектора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
WF через масштаб ускорений: |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
W = |
|
|
|
|
|
|
μ |
|
; W = 5 13 = 65 см с2 , |
|||||||||||||
|
|
|
|
|
|
W |
|
|
W |
|||||||||||||||||||
|
|
|
|
|
|
F |
|
|
|
|
|
F |
|
|
|
|
|
F |
|
|
|
|
|
|
|
|||
и по аналогии определяется модуль вектора W |
|
τ |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
FE |
|
||||
|
|
|
|
|
|
W τ |
= |
|
|
|
μW |
; |
W |
τ = 5 31 = 155 см с2 . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
W |
|
|
||||||||||||||||||||
|
|
|
|
|
|
FE |
|
|
|
|
FE |
|
|
|
|
FE |
|
|
|
|
|
|
|
|||||
|
Так как Wτ |
= ε |
EF |
O F |
и |
W |
τ |
= ε |
|
O F , |
то угловые ускорения |
|||||||||||||||||
|
|
|
|
|
|
FE |
|
|
|
|
3 |
|
|
F |
|
O F |
3 |
|
|
|
||||||||
звеньев EF и O3F равны |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||||||||
|
= WFEτ |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
εEF |
|
= 155 |
= 3,23 |
с−2 ; |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EF |
|
48 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
εO F = |
|
WFτ |
= |
30 |
= 1,07 с−2 . |
|
||||||||||||||||
|
|
|
|
|
|
O3F |
28 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Направление угловых ускорений εFE и εO3F обозначим круглыми стрелками вокруг звеньев EF и O3F в соответствии с направлениями найденных векторов WFEτ и WFτ .
68

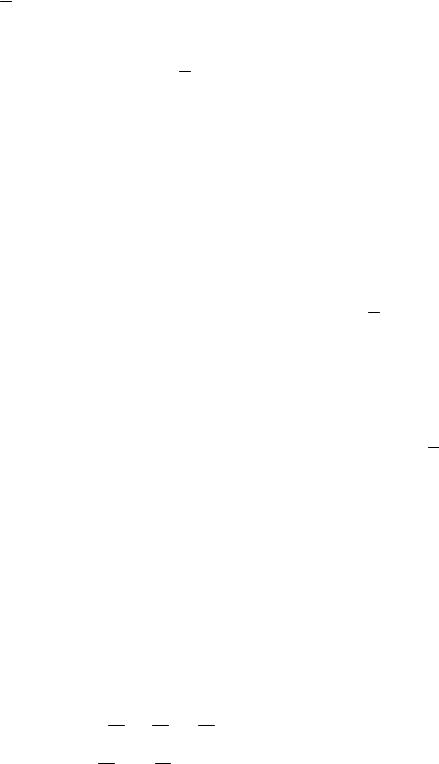
6. Аналитическое определение ускорения точки В и углового ускорения звена АВ
Схема механизма рисуется в выбранном масштабе длин. В данном случае μι= 0,65 см мм (рис. 2.12). Для аналитического определения уско-
мм (рис. 2.12). Для аналитического определения уско-
рения точки В воспользуемся теоремой об ускорениях точек плоской фигуры.
Принимая за полюс точку А, выразим ускорение точки В по формуле
|
|
n + W |
τ = W |
n + W |
τ |
|
|
n |
|
|
τ . |
(11) |
W |
+ W |
+ W |
||||||||||
|
B B A A |
|
BA |
|
BA |
|
||||||
В этом векторном уравнении известны по модулю и направлению ускорения
WAn = 485 см с2 ; WAτ = 325 см
с2 ; WAτ = 325 см с2 ;
с2 ;
WBAn = ω2AB AB; WBAn = (1,47)2 63 = 136 см с2 ;
с2 ;
WBn = ωO2 2 B O2B; WBn = (0,73)2 41 = 22 см с2 .
с2 .
Для ускорений WBτ и WBAτ известны лишь прямые, по которым они
направлены. Надо определить направления этих ускорений и их модули. Согласно векторному равенству (6) из точки А без соблюдения масштаба
проведем |
векторы |
WAn вдоль звена |
О1 А, направляя его к |
точке О1 и |
||||||||||||
|
|
τ |
|
n |
(или |
|
τ |
O A ) по направлению круглой стрелки углового ус- |
||||||||
|
W |
W |
W |
|||||||||||||
|
A |
A |
|
A |
1 |
|
|
|
|
|
|
|
|
|||
корения εО А звена О1 А. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
n вдоль |
|
|
Затем из точки В, не соблюдая масштаб, проведем вектор |
|
|
||||||||||||
|
|
W |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
звена |
О2 В , направляя его к точке О2 , |
|
|
|
τ О В, предполагая на- |
|||||||||||
вектор W |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
B |
2 |
|
|
|
|
правленным в произвольную сторону, вектор |
|
n |
вдоль звена АВ, направ- |
|||||||||||||
W |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
BA |
|
|
|
|
||
ляя его к точке В, и вектор WBAτ АВ, направленным в произвольную сто-
рону.
Выберем систему координат Bxy с началом в точке В и спроектируем векторное равенство (11) на оси Вx и Вy .
Проектируя равенство (11) на ось Вx , получим:
W n sinβ+ W τ cosβ = W n cosα− W τ sin α− W n . |
(12) |
||||
B |
B |
A |
A |
BA |
|
69

70
|
|
|
μ l |
= 0,65см мм |
A |
WAτ |
|
μl = 0,65 см/мм |
|
|
|
D |
|
|
|
|
|
|
|
|
α |
|
|
|
|
ϕ = 115o |
|
|
|
|
εO A |
|
|
|
|
1 |
|
E |
|
|
ωO A |
|
|
|
|
1 |
|
|
|
|
O1 |
|
|
O3 |
|
W n |
|
|
|
|
A |
|
|
|
|
ωAB |
|
|
|
|
C |
|
F |
|
|
|
|
|
|
|
W n |
|
|
|
|
AB |
|
|
|
|
B |
|
y |
|
|
|
|
|
|
W τ |
β |
W n |
|
|
|
|
|
||
AB |
|
B |
ωO B |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
O2 |
|
|
W τ |
|
Рис.2.12 Аналитическое определение ускорения точки В |
|
|
B |
|
и углового ускорения звена АВ. |
|
|
x |
|
||
|
|
|
|
|
Рис. 2.12. Аналитическое определение ускорения точек В и углового ускорения звена АВ