

2.6. Заміна вищих кінематичних пар
При вивченні структури кінематичних плоских механізмів в багатьох випадках зручно замінювати вищі пари кінематичними ланцюгами, що мають тільки нижчі обертальні пари 5 класу.
При цій заміні повинна задовольнятися умова, щоб механізм, отриманий після такої заміни, володів колишньою мірою рухомості і щоб зберігалися відносні встановищі, що складають рух усіх його ланок.
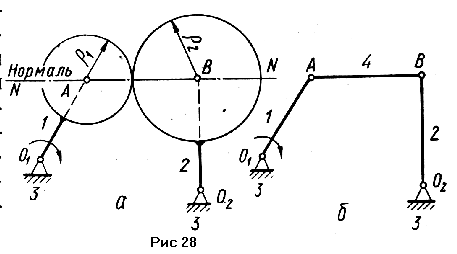
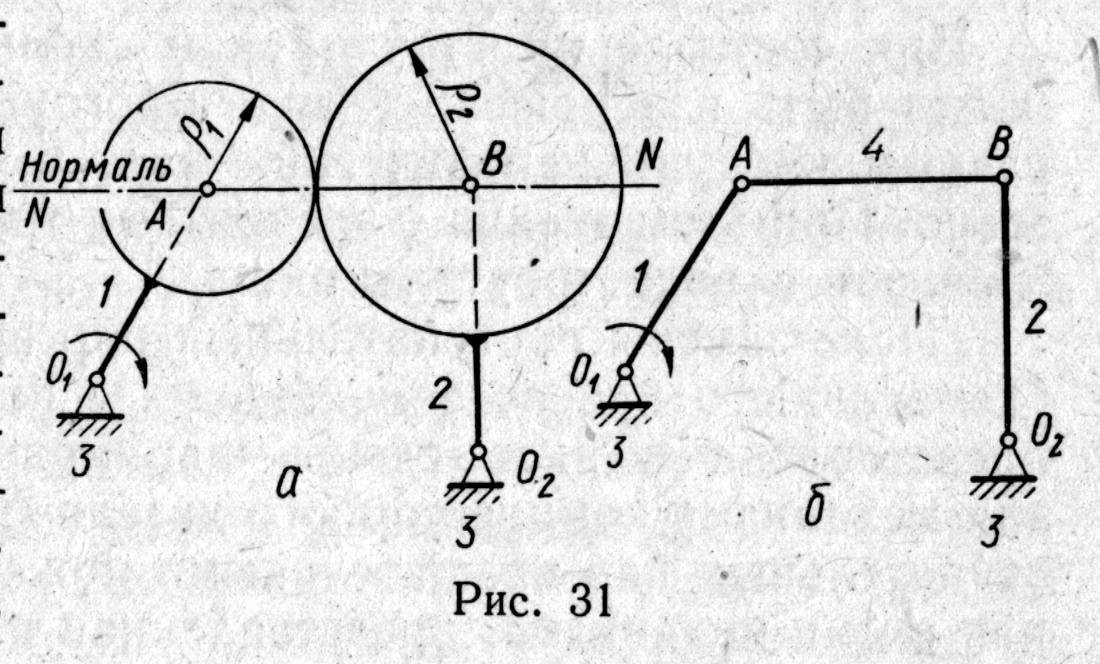
Розглянемо механізм, показаний на рис. 32.
Визначимо міру рухомості механізму як плоского W = 3 3 – 2 4 = 1 . Можна показати, що механізм, який розглядається з кінематичною парою 4 класу “1 “ може бути змінений шарнирним чотирьохланковим механізмом. Замініючий механізм еквівалентний заданому і із точки зору законів руху ланок 1 і 2.
При заміні обов'язково треба проводити нормаль N – N в точці касання ланок
і шукати центри А і В кривизни кривих радіусів 1 і 2.
З диференціальної геометрії відомо, що коло кривизни в точці касання з
кривою і сама крива еквівалентні похідних другого порядку включно, і тому замініючий механізм еквівалентний основному до тієї самой міри, тобто положення, швидкості і прискорення одноіменних точок того і другого механізму будуть однаковими.
|
|
1, 2 – ланки 3 - стояк; |
2.7. Модульний принцип побудови конструкцій роботів
Звичайно в механізмах ПР застосовуються однорухомі кінематичні пари [ ].
Поєднання цих пар (обертальних і поступальних) дозволяє забезпечити різноманітну форму робітничого обсягу. Він може описуваться прямокутною, циліндричною, сферичною і кутовою системами координат. Із ними докладніше ми ознайомимося в розділі кінематичного аналізу. ПР при цьому конструюються з окремих модулей. Кожний модуль - це елемент уніфікации конструкції ПР.
2.8. Контрольні запитання до лекції 2
Дати визначення механізму та машин.
Визначити, чи є машинами об’єкти: автомобіль, ЕОМ, прес, штамп, транспортер.
Що розуміють під структурною та кінематичною схемами механізму?
Як визначити ступінь рухомості плоского механізму?
Поясніть фізичний зміст числових коефіціентів в структурній формулі.
Що називається групою Ассура? Основні прикмети групи Ассура?
Що таке первинний механізм?
Приведіть приклад групи Ассура в механізмі. Як слід розуміти нульовий ступінь рухомості групи?
Приведіть приклад просторового механізму, покажіть на ньому рух ланок.
Які зв/язки називають надмірними? Як вони впливають на чісло ступинів рухомості механізму.
Дати визначення заміняючого механізму.
Як проводиться заміна вищої пари кінематичним ланцюгом з нижчими парами? Навести приклад.
В якій послідовності проводиться розклад механізму на групи Ассура?
Класифікація груп Ассура, назвіть принципи, які положені в основу поділення механізмів на групи?
Який це механізм? Важильний; храповий; мальтійського хреста; кулачковий?
1
 6.Визначите ступінь рухливості
W (маневреність) маніпулятора М-22
6.Визначите ступінь рухливості
W (маневреність) маніпулятора М-22
.
















Визначить число ступенів волі W механізму маніпулятора «Маскот».

17. Визначить ступінь рухливості ричажно-кулачкового і зубчастого механізмів з урахуванням ролика, як ланки, що вносить місцеву рухливість. Чи має механізм надмірні зв'язки?
1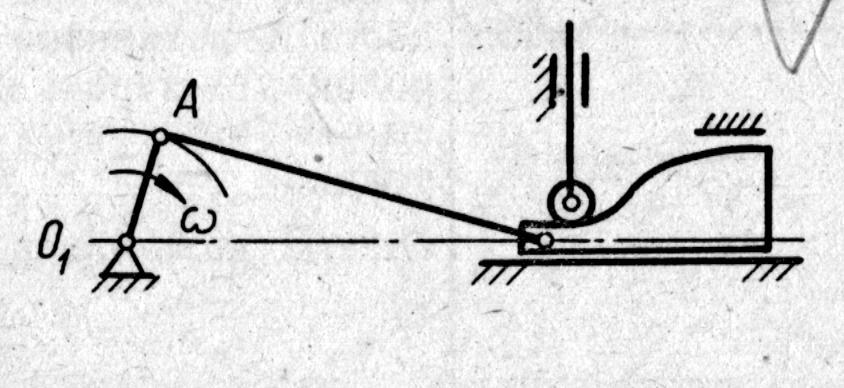

 8.
Визначить ступінь рухливості механізму
по формуліП. Л. Чебишева..
8.
Визначить ступінь рухливості механізму
по формуліП. Л. Чебишева..
20. Розрахуйте ступінь рухливості механізмів по формуліП. Л. Чебишева.
( Схеми механізмів розташовані у додатках 1 - 20 ).
21..Яку назву
має цей механізм?
Лекція 3
КІНЕМАТИЧНИЙ АНАЛІЗ