

lek2
.pdfЧАСТЬ 2. ОСНОВЫ КЛАССИЧЕСКОЙ МЕХАНИКИ
Механика – часть физики, изучающая движение и взаимодействие физических тел в пространстве и времени. При этом физика имеет дело не с реальными телами: автомобилями, поездами, пушками, снарядами и т.д., а с физическими моделями, заменяющими эти реальные тела.
Кинематика – часть механики, изучающая характеристики движения: скорость и ускорение физических тел. Динамика – часть механики, изучающая взаимодействие физических тел как причину ускорения.
ПРОСТРАНСТВО И ВРЕМЯ В КЛАССИЧЕСКОЙ МЕХАНИКЕ В классической механике пространство считается абсолютным, то есть
не зависящим от наличия в нем материи. Пространство рассматривается как вместилище для материи. Пространство прямолинейно, трехмерно, бесконечно, безгранично, однородно (одинаково устроено в любой его точке) и изотропно (одинаково устроено по всем направлениям).
Время считается абсолютным, то есть не зависящим от пространства и процессов, происходящих с материей. Время бесконечно и однородно.
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Если все точки физического тела движутся одинаково (тело при этом
не поворачивается), это физическое тело можно заменить моделью – материальной точкой.
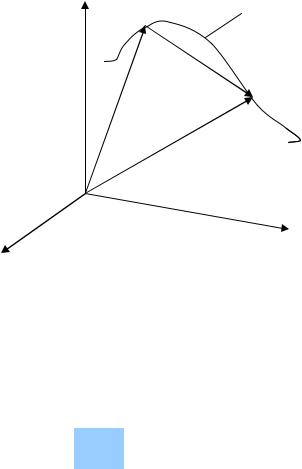
Движение материальной точки рассматривается по отношению к некоторой системе отсчета – декартовой системе координат, связанной с какой-нибудь точкой пространства или телом отсчета (cм. рисунок).
Некоторая система отсчета К = {x, y, z}, связанная, например, с Землей, считается неподвижной и называется лабораторной. Любая другая система отсчета К′ = {x′, y′, z′}, движущаяся относительно системы К, называется подвижной.
Вдоль осей координат направлены единичные векторы – орты: i –
вдоль оси x, j – вдоль оси y, k – вдоль оси z. |
|
r |
|
= |
|
r |
|
= |
|
r |
|
= 1. |
|
|
|
|
|
|
|||||||
|
|
|
|
|||||||||
|
i |
|
|
j |
|
|
k |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Положение материальной точки в пространстве определяется ее координатами x, y, z в системе отсчета (измеряемыми в метрах) и радиусом – вектором r , проведенным из начала отсчета в данную точку. Координаты материальной точки являются и координатами (проекциями) радиуса – вектора. Координаты являются явными функциями от времени.
|
r |
r |
r |
|
|
|
|
r |
= x i + y j + z k , м. |
|
|
||
Пусть в процессе движения материальная точка переместилась из точ- |
||||||
ки 1 с радиусом – вектором |
r |
в точку 2 с радиусом – вектором |
r |
. При этом |
||
r1 |
r2 |
|||||
материальная точка совершила перемещение |
|
|
||||
|
|
r |
r |
r |
|
|
|
|
r |
= r2 |
− r1 . |
|
|
zтраектория
1
r1 |
|
|
r |
|
|
|
|
|
|
|
2 |
|
|
|
r2 |
0 |
|
|
|
x |
|
|
y |
r |
r |
, и r |
обозначены без стрелок жирным шрифтом. |
На рисунке векторы r1 |
, r2 |
Перемещение в единицу времени есть вектор скорости. Вектор мгно-
венной скорости определяется как производная от радиуса – вектора по времени:
|
|
r |
|
dx r |
dy r |
dz r |
r |
r |
||||
r |
|
dr |
|
|||||||||
v |
= |
|
|
= |
|
i + |
|
j + |
|
k = vx i + v y j + vz k , м/с. |
||
dt |
|
|
|
|||||||||
|
|
|
dt |
dt |
dt |
|
|
|||||
Вектор скорости является явной функцией от времени. Модуль вектора скорости можно вычислить по формуле

|
r |
|
|
|
|
|
|
v |
= v 2 |
+ v 2 |
+ v 2 |
. |
|
|
|
|
x |
y |
z |
|
|
|
|
|
|
|
|
Любое криволинейное движение можно представить в виде векторной суммы трех прямолинейных движений по осям x, y и z.
Материальная точка движется по некоторой линии – траектории. Век-
тор мгновенной скорости направлен по касательной к траектории. Дли-
на пройденной траектории называется пройденным путем S и измеряется в метрах (м). Пройденный путь является монотонно возрастающей функцией времени: S = f (t ).
Производная от пройденного пути по времени есть модуль мгно- венной скорости:
|
r |
= |
dS |
, м/с, |
|
v |
|
||
|
dt |
|||
|
|
|
|
где dS – дифференциал (бесконечно малое приращение) пройденного пути S, а dt– дифференциал времени t. Модуль мгновенной скорости является явной функцией от времени.
Чтобы вычислить пройденный путь, нужно проинтегрировать модуль мгновенной скорости по времени от 0 до t:
t r
S = ∫ v dt .
0
Для вычисления средней скорости нужно пройденный путь за время t разделить на это время:
vср = S .
t
Если движение происходит в плоскости, достаточно двух осей координат. Имеем x = f1 (t ), y = f 2 (t ). Исключив из обоих равенств время t, получим уравнение траектории y = f (x).
Так же для плоской траектории имеем vx |
= |
dx |
и v y |
= |
dy |
, откуда |
||||||||
dt |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
||
|
vx |
= |
dx |
|
dt |
= |
dx |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
v y dt dy dy

Если вектор скорости в процессе движения изменяется, то материальная точка движется с ускорением. Ускорение – это изменение скорости в единицу времени. Вектор мгновенного ускорения равен производной от вектора скорости по времени:
|
|
r |
r |
r |
|
||
r |
|
dv |
2 |
||||
a |
= |
|
|
= a x i + a y j + a z k , м/с . |
|||
dt |
|||||||
|
|
|
|
|
|||
Модуль вектора ускорения можно вычислить по формуле
|
r |
|
|
|
|
|
|
a |
= a 2 |
+ a 2 |
+ a 2 |
. |
|
|
|
|
x |
y |
z |
|
|
|
|
|
|
|
|
Вектор v может изменяться по величине и по направлению. Если вектор скорости по величине не меняется, то движение равномерное, если меняется – то неравномерное. Если вектор скорости по направлению не меняется, то движение прямолинейное, если меняется, то криволинейное. Таким образом, имеют место четыре вида движений:
1)прямолинейное и равномерное, если v = const;
2)прямолинейное и неравномерное;
3)криволинейное и равномерное;
4)криволинейное и неравномерное.
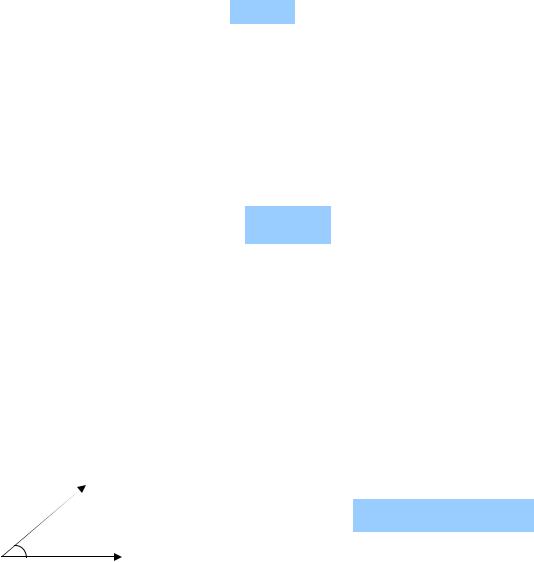
Если вектор a = const, то движение материальной точки является равноускоренным. Можно доказать, что траекторией равноускоренного движения является прямая, если вектор v параллелен вектору a , или парабола, ес-
ли вектор v не параллелен вектору a . |
|
|
На этом рисунке векторы v |
и a |
обозначены |
r |
r |
|
vжирным шрифтом.
|
Если вектор v |
параллелен вектору a , то движе- |
|
r |
r |
|
ние прямолинейное. |
|
|
a |
|
α |
Если угол α острый, то движение криволиней- |
|
ное и ускоренное.
Если угол α тупой, то движение криволинейное и замедленное

Различают две основные задачи механики: прямую и обратную.
1.Если известен закон движения, т.е. известны в явном виде зависимости координат материальной точки от времени, то можно путем взятия производных вычислить проекции векторов скорости и ускорения – прямая задача.
2.Если известны начальные координаты материальной точки, вектор начальной скорости, и зависимость вектора ускорения от времени, то можно путем интегрирования по времени получить закон движения, т.е. зависимости координат от времени – обратная задача:
|
r |
r |
t |
r |
|
|
|
v |
= v0 |
+ ∫a |
dt |
, |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
r |
r |
t |
r |
|
|
|
r |
= r0 |
+ ∫v |
dt |
. |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Причиной изменения скорости тела является действие силы на это те-
ло. Если на материальную точку никакие силы не действуют, то она движется относительно Вселенной прямолинейно и равномерно или покоится. Связанная с такой точкой система отсчета называется инерциальной системой отсчета. Все инерциальные системы отсчета движутся относительно друг друга и относительно Вселенной прямолинейно и равномерно. Существование инерциальных систем отсчета утверждается первым законом Ньютона.
В природе существует только взаимодействие между телами. На каждую силу действия со стороны одного из взаимодействующих тел на другое следует ответ (реакция) – сила противодействия со стороны этого другого тела на первое. Причем сила – это вектор.
Третий закон Ньютона утверждает, что сила действия и сила про- тиводействия всегда направлены по одной прямой навстречу друг другу и равны по величине:
F1−2 = − F2−1 .
Каждое физическое тело обладает массой, которая позволяет ему сохранять свое механическое состояние, т.е. двигаться с постоянной скоростью или покоиться. Масса тела – мера его инертности. Чем больше масса тела, тем меньше ускорение при одном и том же воздействии на это тело:
|
a1 |
= |
m2 |
, m a = m |
|
|
при |
r |
= |
r |
, |
||
|
a |
|
F |
F |
|||||||||
|
|
|
2 |
||||||||||
|
a2 |
|
m1 |
1 |
1 |
2 |
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда следует, что вектор силы можно определить как произведение массы тела на вектор его ускорения:
r |
r |
, |
кг м |
. |
|
F |
= m a |
|
|||
с2 |
|||||
|
|
|
|
Второй закон Ньютона утверждает, что в инерциальной системе отсчета ускорение тела создается совместным действием всех остальных тел на данное тело. Причем все реальные силы, источником каждой из которых должно быть конкретное тело, складываются как векторы, от- куда
r |
r |
|
|
= ∑Fi |
. |
||
m a |
|||
|
i |
|
Эта формула является аналитическим выражением второго закона Ньютона.
РАБОТА И МОЩНОСТЬ
r
Элементарной работой силы F называется скалярное произведе- ние этого вектора силы на вектор элементарного перемещения:
F
r |
r |
|
r |
|
r |
cosα |
. |
δA = F dr |
= |
F |
|
dr |
|||
|
|
|
|
|
|
|
|
α
dr
δA – бесконечно малая величина, но не дифференциал, поэтому использован символ δ. Как будет показано, работа может зависеть от траектории, в то время как дифференциал никогда не зависит от траектории.
Как известно, скалярное произведение двух векторов равно сумме произведений одноименных координат этих векторов, откуда
δA = Fx dx + Fy dy + Fz dz .
Чтобы вычислить работу по перемещению материальной точки из точки 1 траектории в точку 2, нужно взять интеграл
2 |
r |
r |
, Дж. |
A = ∫F dr |
|||
1 |
|
|
|
Работа, совершенная в единицу времени называется мощностью, которая измеряется в Ваттах (Вт):
P = A , Дж/с = Вт.
t
Для вычисления мгновенной мощности нужно взять производную:
|
δA |
|
r |
r r |
|
|
|
|
F dr |
. |
|||
P = |
|
= |
|
= F v |
||
dt |
dt |
|||||
|
|
|
|
КИНЕТИЧЕСКАЯ ЭНЕРГИЯ Согласно второму закону Ньютона, векторная сумма всех сил сообщает
телу ускорение, и скорость тела изменяется. Покажем, что работа всех сил,
действующих на материальную точку, равна изменению ее кинетиче- ской энергии.
2 |
r r |
2 |
|
|
2 |
r |
|
2 |
|
|
mv 2 |
mv 2 |
||
r |
r |
dv |
r |
r r |
|
|||||||||
A = ∫∑Fi dr |
= ∫ma |
dr |
= ∫m |
|
dr |
= ∫m v dv |
= |
2 |
− |
1 |
, |
|||
dt |
2 |
2 |
||||||||||||
1 |
i |
1 |
|
|
1 |
|
|
1 |
|
|
|
|
|
|
где Ek = mv 2 – кинетическая энергия материальной точки.
2
ИМПУЛЬС МАТЕРИАЛЬНОЙ ТОЧКИ
Импульсом материальной точки называется векторная физиче- ская величина, равная произведению массы этой материальной точки на вектор ее скорости:
p = m v .

Покажем, что производная от вектора импульса материальной точки по времени равна векторной сумме сил, действующих на эту материальную точку:
r |
|
r |
|
dp |
= m |
dv |
|
dt |
dt |
||
|
r |
r |
= m a |
= ∑Fi . |
|
i |
Это уравнение также является уравнением второго законы Ньютона.
Чтобы найти изменение импульса, нужно проинтегрировать векторную сумму всех сил по времени:
r t ∑ r
p = ∫ Fi dt .
0i
Итак, чтобы изменить импульс материальной точки, нужно подей- ствовать на нее некоторой силой в течение длительного времени.
ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА Взаимодействующие между собой тела – материальные точки – состав-
ляют систему. Импульс системы материальных точек – это векторная сумма
импульсов всех материальных точек, составляющих систему: |
r |
r |
p = ∑mi vi . |
||
i
Производная от вектора импульса системы материальных точек по времени равна векторной сумме сил, действующих между материальными точками, составляющими систему – внутренних сил, и сил, действующих на материальные точки, составляющие систему, со стороны тел, не входящих в систему, – внешних сил. Но векторная сумма всех внутренних сил как сил действия и противодействия по третьему закону Ньютона равна нулевому вектору. Итак, получим
|
r |
r |
r |
r |
|
|
dp |
|
|||
|
= ∑F |
внтр + ∑Fвнш = ∑Fвнш |
, |
||
|
dt |
||||
|
|
|
|
|
|
откуда изменение импульса системы будет равно интегралу от векторной суммы всех внешних сил по времени:
r t ∑ r
p = ∫ Fвнш dt ,
0
то есть изменить импульс системы материальных точек могут только внешние силы, действующие в течение некоторого промежутка времени.
Таким образом, если внешние силы на систему не действуют, а такая система материальных точек называется замкнутой, то импульс такой системы не изменяется, то есть сохраняется.
Мы получили закон сохранения импульса: импульс замкнутой систе-
мы не изменятся, какие бы взаимодействия и превращения ни происхо- дили бы внутри этой замкнутой системы.
Если внешние силы компенсируют друг друга, то импульс системы также не изменяется.
Если внешние силы на систему все же действуют и не компенсируют друг друга, то в ходе процессов внутри системы, происходящих в течение очень малого промежутка времени, как это бывает при ударе тел или при взрыве, импульс системы также можно считать неизменным, т.е. применить к этой системе закон сохранения импульса.
При абсолютно неупругом ударе двух шаров эти шары как бы слипаются, образовав одно тело. В этом случае уравнение закона сохранения импульса имеет следующий вид:
m1v1 ± m2 v2 = (m1 + m2 ) v ,
при этом знак «+» ставится, если шары до удара двигались навстречу друг другу, и знак «–», если в одну сторону.
АБСОЛЮТНО ТВЕРДОЕ ТЕЛО. УГЛОВАЯ СКОРОСТЬ. УГЛОВОЕ УСКОРЕНИЕ
Если физическое тело поворачивается, и это вращение принципиально важно для конкретной задачи, то это тело нельзя считать материальной точкой. В этом случае используется другая модель – абсолютно твердое тело. В дальнейшем слово «абсолютно» будем опускать.
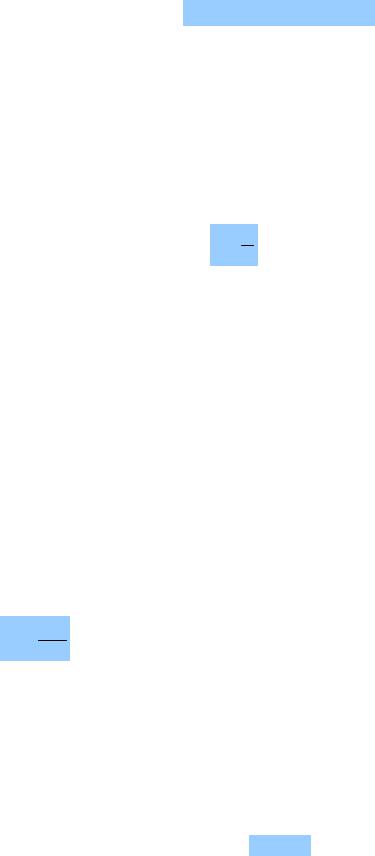
Пусть некоторое твердое тело вращается вокруг оси 0z с угловой скоростью ω. С помощью правила буравчика определяют вектор ϕ угла поворо-
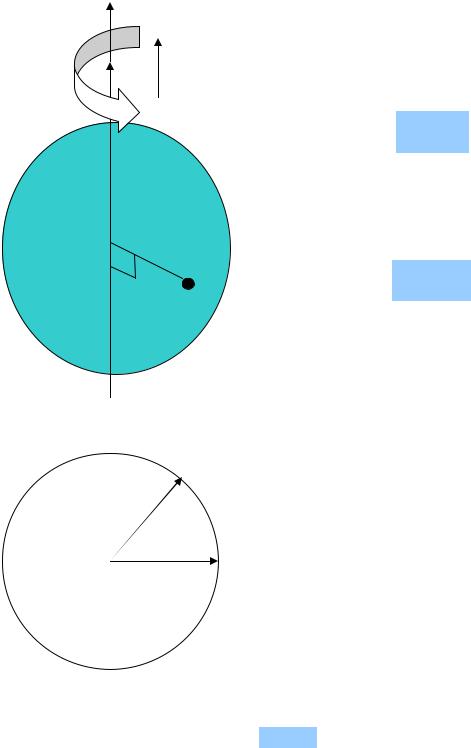
та этого тела (на рисунке вектор ϕ обозначен жирным шрифтом) Этот вектор параллелен оси вращения. Если он направлен на нас, то тело вращается против часовой стрелки, как это и показано на рисунке. Величина этого вектора измеряется в радианах, т.е. в безразмерных единицах.
φ
|
ω |
Вектор угловой скорости равен |
|||||||
|
|
|
|
|
|
|
|
|
|
z |
|
производной от вектора угла пово- |
|||||||
|
|
рота тела по времени: |
|
||||||
|
|
|
|
|
r |
1 |
|
|
|
|
|
|
r |
= |
dϕ |
|
. |
||
|
|
|
ω |
|
, |
|
|
||
|
|
|
dt |
c |
|||||
|
|
|
|
|
|
|
|||
0
анах, на радиус r:
Вектор углового ускорения ра- вен производной от вектора угловой скорости тела по времени:
r |
|
|
r |
1 |
|
|
|
|
r |
= |
dϕ |
|
. |
||
|
ε |
|
, |
|
|
||
dm |
dt |
c 2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
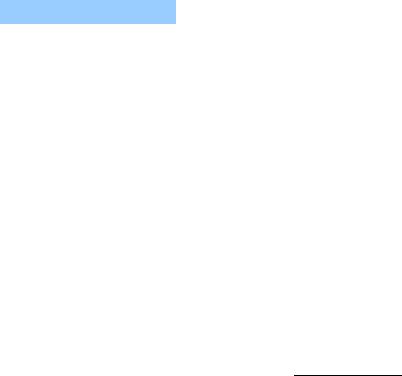
Ели тело вращается вокруг оси |
|
|
|
0z, каждая точка этого тела движется |
r |
|
S |
по окружности радиуса r, перпендику- |
|
φ |
|
|
|
|
лярной этой оси, и за некоторое время |
|
|
|
|
|
|
|
|
t описывает дугу, длина которой S |
|
|
|
равна произведению угла поворота те- |
|
|
|
ла φ, выраженного обязательно в ради- |
S = ϕ r .