

7.3. Цепи смещения уровня
В состав таких цепей, помимо резисторов и диодов, обязательно входят конденсаторы. Дополнительно в такие цепи могут вводиться источники опорных напряжений. Это существенно расширяет возможности схем. Основным моментом при построении таких цепей является корректный выбор постоянных времени заряда и разряда конденсатора. При этом постоянная времени ставится в соответствие временным характеристикам сигнала, уровень которого смещается, считая, что конденсатор полностью заряжается за время t=5 .
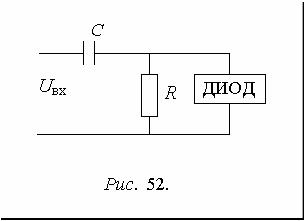
Обобщенная схема цепи смещения уровня представлена на рис. 52.
Анализ таких схем удобно выполнять, начиная с интервалов времени, соответствующих проводящему состоянию диода.
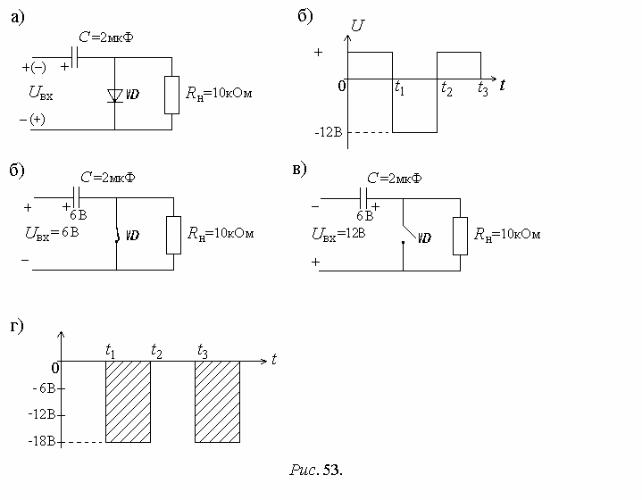
Пример 20 Определить выходное напряжение схемы, представленной на рис.53 а,
если входной сигнал имеет форму и параметры, представленные на рис.53 б.
77
Решение
Как следует из схем на рис.53 а и б на интервале времени 0≤t≤t1 входной сигнал положителен. Полагая диод идеальным, видим, что нагрузка оказывается закороченной диодом Д1, рис.53 б. Это значит, что в момент времени t=0+ конденсатор мгновенно заряжается до Uc=6В и будет оставаться заряженным до этого напряжения в течение времени 0≤t≤t1, напряжение на нагрузке в это время равно нулю. Это произойдет потому, что постоянная времени заряда конденсатора τз=С×0=0.
78

На интервале времени t1≤t≤t2 знак входного сигнала меняется на обратный, рис. 53 а и б– знаки в скобках.. Диод Д при этом размыкается, рис. 53 в, и к нагрузке оказывается приложенным суммарное напряжение Uн=UС+Uвх=6+12=18В. Постоянная времени разряда конденсатора
τр=C×Rн=2мкФ.10к=20мкс. Это значит, что для полного разряда конденсатора требуется время tр=5τр=5×20мс=100мс. Если скважность входного сигнала считать равной S=2, то время разряда конденсатора tр=T/2=0,5 мс. Это много меньше требуемого времени разряда. Тем самым конденсатор практически не разряжается, и на нагрузке наблюдается прямоугольный отрицательный импульс, рис.53 г.
Таким образом, рассмотренное устройство преобразует разнополярный сигнал в однополярный. При этом размах напряжения сигнала остается неизменным относительно нулевой оси. Если направление диода поменять на обратное, то на нагрузке будут наблюдаться положительные прямоугольные импульсы той же величины, рис. 54.
Изложенные соображения состоятельны лишь при условии tр<<tрп=5τр. Если это условие не выполняется, то смещение уровня не происходит. В самом деле, положим, в предыдущем случае С=0,2мкф, а Rн=0,5к. Тогда
τр=0,2мкф×0,5к=0,1мс. Это много меньше фактического времени разряда, и конденсатор на интервалах времени, соответствующих знакам в скобках, будет успевать разряжаться полностью, 5τр =5×0,1мкс=0,5мкс=tрп. Эпюр напряжения в этом случае имеет вид, представленный на рис.55.
79
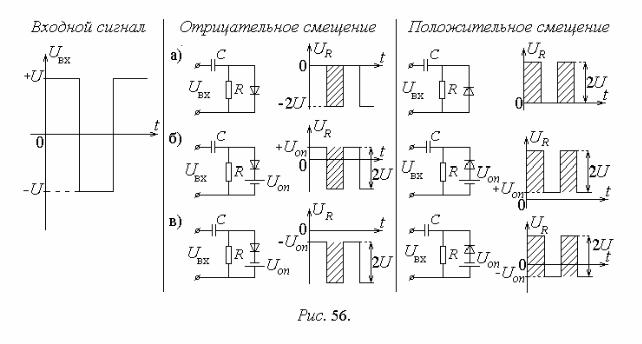
Схемы смещения уровня с использованием источников опорных напряжений представлены на рис.56.
Контрольные задания
1.Объяснять принцип действия схемы удвоения напряжения.
2.Объяснить принцип действия утроителя и учетверителя напряже-
ния.
3.Объяснить принцип действия диодных ограничителей напряже-
ния.
4.Объяснить принцип действия диодных ограничителей, содержащих источник напряжения.
5.Объяснить принцип действия схем смещения уровня и особенности их построения.
8.Диоды в задачах линейно-кусочной аппроксимации функций
Исследования сложных систем, определяемых нелинейными связями их параметров, а также различного рода нелинейных уравнений целесообразно выполнять методом их моделирования. В основу такого подхода положена линейно-кусочная аппроксимация фактических нелинейных
80
функций набором припасованных прямолинейных сегментов. Естественно, с увеличением числа аппроксимирующих сегментов, точность аппроксимации увеличивается.
Линейно-кусочно аппроксимированную функцию легко воспроизводить посредством набора идеальных диодов, резисторов, источников напряжения и источников тока. При этом фактической функции y=f(x) ставится в соответствие функция i=f(U), т. е. функции y соответствует i, а аргументу x величина u. Такой подход обоснован тем, что управляемые источники напряжения проще воспроизводить, нежели источники тока.
На рис. 57 представлена схема моделирования линейной функции y=kx
здесь y≈i, x≈U, k≈1/R.
81
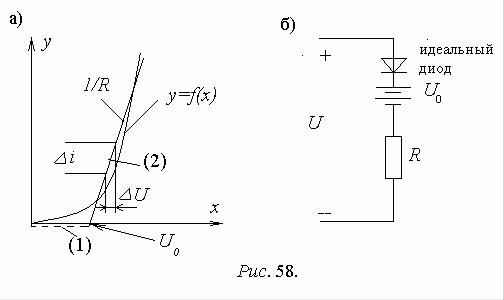
Нелинейная функция, аппроксимированная двумя сегментами, представлена на рис. 58 а. Нелинейно-кусочная аппроксимированная функция представлена здесь двумя прямыми (1) и (2). Физически данная функция представляется идеальным диодом, встречно ему включенным источником напряжения U0, величина которого определяется точкой пересечения луча 2 с осью х, и резистором R, сопротивление которого определяется наклоном луча (2), т. е. R= U/ i, рис. 58 б. В самом деле, здесь при U<U0 тока в цепи нет, а при U>U0 в цепи наблюдается ток, равный i=(U-U0)/R. Таким образом меняя U представляется возможным наблюдение i, меняющегося в соответствии с линейно-кусочной функцией.
В случае недостаточной точности моделирования, как известно, можно увеличить число аппроксимирующих сегментов, например, взять три сегмента рис. 59а.
82

Моделирующая цепь здесь представлена двумя параллельными цепями. Это обусловлено тем, что наклон аппроксимирующей функции растет, что означает уменьшение результирующего сопротивления моделирующей цепи. В самом деле, при U<U0 тока в цепи нет, что соответствует сегменту (1). При U0<U<U1 в цепи течет ток i=(U-U0)/R1, т. е. наклон сегмента (3) определяется резистором R1. При U1<U ток обтекает обе параллельные цепи, т. е. i=i1+i2. Следовательно, i=(U-U1)/RЭ. Величина
сопротивления эквивалентного резистора определяется просто |
|
||||||||||
Отсюда |
1 |
|
1 |
|
1 |
или |
|
R |
|
R |
|
Следует |
|
= |
|
− |
|
при |
R2 = |
|
э |
1 |
этом |
R2 |
Rэ |
R1 |
|
||||||||
помнить |
|
|
|
|
R1 − Rэ |
разницу |
|||||
между |
|
|
|
|
|
|
|
|
|
|
|
моделирующими цепями, рассмотренными выше, и малосигнальными эквивалентными цепями, упоминавшимися выше. Последние соотносятся к цепям, поведение которых рассматриваются в малых окрестностях некоторой точки нелинейной характеристики. Моделирующая же цепь работает в широком диапазоне изменения напряжения.
Пример |
1 = |
1 + |
1 |
21 |
||
|
Rэ |
|
R1 |
|
R2 |
Используя метод моделирования |
решить |
систему уравнений: |
|||||
83
y = x
y = x2 при 0 <х<2.
Решение
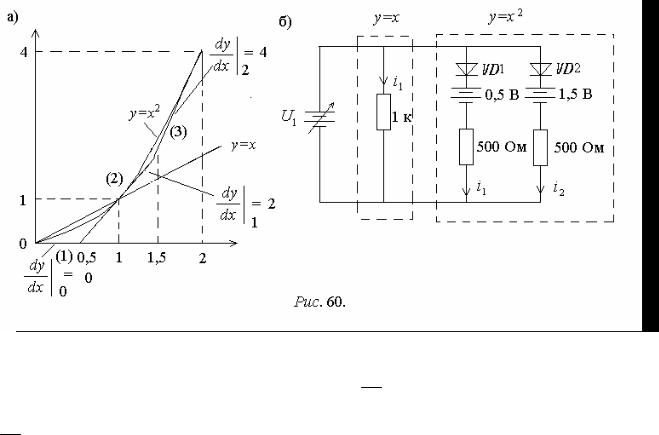
Естественно, что решением данной системы уравнений является x=1. Тем не менее, решим её методом моделирования. Для этого,
сперва, построим функцию y=x2 и аппроксимируем её тремя сегментами, рис. 60 а, разбив участок изменений аргумента на равные интервалы.
Функция аппроксимируется касательными с наклонами: dydx = 2 и
ddxy = 4. Наклоны определены в точках касания отрезков и кривой. Ось
абсцисс масштабируется в вольтах, а ось ординат – в миллиамперах. Наличие двух наклонных отрезков с увеличивающейся крутизной свидетельствует о модели, состоящей из двух параллельных ветвей. Каждая ветвь содержит диод и встречно включённый источник напряжения. Напряжения опорных источников: и0=0.5В, и и1=1.5В. Сопротивления по-
84
следовательных |
резисторов: |
R1=0.5кОм, |
||
R2 = |
R1RЭ |
= 0.5кОм. При x=1 уравнение y=x моделирует- |
||
RЭ − R |
||||
|
1 |
|
||
ся резистором сопротивлением R3=1кОм, рис. 60 б. Как видно из рис. 60 а, графики y=x и y=x2 пересекаются только в одной точке с координатами: I=1мА и U=1В. Это и есть решение данной системы уравнений. Собственно процедура поиска решения с помощью модели сводится к следующему. Плавно увеличивается напряжение u и наблюдаются токи i1 и i2. Их равенство и есть искомое решение.
Электрические цепи для моделирования функций с увеличивающейся крутизной строятся очень просто – это параллельные ветви. Сложнее строить модели функций с уменьшающейся крутизной. В этом случае сопротивление моделирующей цепи должно возрастать, т. е. ветви, моделирующие аппроксимирующие сегменты, должны включаться последовательно.
Пример 22 Синтезировать электрическую цепь для моделирования функции
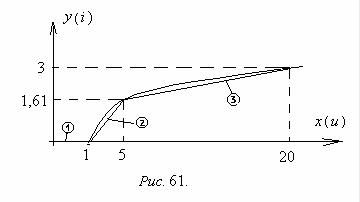
y=ln(x) в диапазоне 0<y<3
Решение:
График зависимос-ти x=ey для диапазона 0<y<3 представлен кривой на рис. 61.
Аппроксимацию осуществляем тремя сегментами с точками излома: I=0А при U=1В; I=1.61А при U=5В; I=3А при U=20В. Результат аппроксимации представлен на рис. 61.
Анализ рис. 61 показывает, что участок 1—2 легко аппроксимируется цепью, представленной на рис.62а.
85
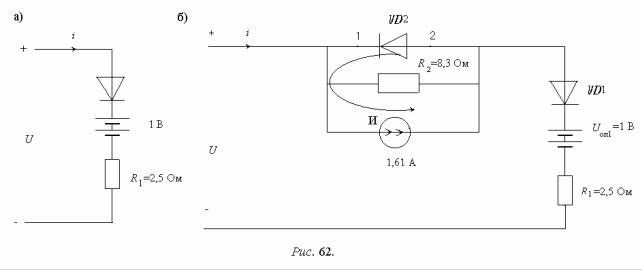
В самом деле, здесь при U<1В тока в цепи нет—моделируется участок ‘1’. При U>1В в цепи течёт ток определяемый резистором R1=2,5Ом, т.е. крутизна участка ‘2’ определится величиной
1 |
= |
1 |
= 0,4Cм при U>5В крутизна должна уменьшаться. |
|
R |
2,5Oм |
|||
|
|
|||
1 |
|
|
|
Это значит, что при U>5В последовательно с цепью на рис. 62 а должно включиться дополнительное сопротивление R2. Оно в сумме с R1 должно обеспечить Rэ=R1+R2. Отсюда R2=Rэ-R1=10.8Ом-2.5Ом=8.3Ом. Это дополнительное сопротивление работает лишь при U>5В. Т.е. в диапазоне напряжений 5В ≥ U ≥ 1В оно должно быть выключено— зашунтировано, например, идеальным диодом.
Полная моделирующая цепь представлена на рисунке 62 б.
Здесь источник тока И возбуждает ток в контуре: VD2-И. В результате участок 1-2 цепи оказывается закороченным. Это значит, что через него может протекать встречный ток i<1.61А. Таким образом, при i<1.61А работает цепь VD1-Uоп1-R1 и формирует участок 1—2 линейнокусочной характеристики.
При i>1,61 напряжение на VD2 меняет знак на обратный, участок 1-2 цепи размыкается и ток i течет через дополнительный резистор R2. Тем самым формируется участок 3 линейно-кусочной характеристики.
Рассмотренная процедура построения модели корректна, однако сама модель нерациональна – ее функционирование сопряжено с исполь-
86