

Исследование динамических характеристик объекта управления по его математической модели
В результате линеаризации нелинейной модели объекта управления получено некоторое линейное дифференциальное уравнение 2 порядка. В частности, для варианта «Пример», линеаризованное уравнение имеет вид:
0,01Y + 0,091Y + Y = 0,258X, (14)
Напомним,
что Y=![]() и Y=
и Y=![]() - производные по времени, а (14) это
уравнение в отклонениях от номинального
(знак
опущен для простоты записи).
- производные по времени, а (14) это
уравнение в отклонениях от номинального
(знак
опущен для простоты записи).
Для уравнения 2 порядка каноническая форма записи имеет вид:
T2Y + 2TY + Y = KX (15)
где Т – постоянная времени объекта, с; К – коэффициент усиления объекта по каналу X – Y; - так называемый коэффициент демпфирования, смысл которого будет рассмотрен позже.
Следует отметить важность приведения к канонической форме для получения правильных значений параметров объекта. Характерна черта канонической формы дифференциального уравнения объекта - это то, что при выходной переменной (Y) коэффициент равен 1.
Сравнивая выражения (14) и (15), получим:
T = 0,102; = 0,448; K=0,258.
Применим к уравнению (14) преобразование Лапласа.
Напомним, что для некоторой функции f(t) преобразование Лапласа определяется, как:
![]() ,
,
где р – комплексная переменная.
Для величин, входящих в уравнение (14), преобразование Лапласа имеет вид:
![]() ;
;
![]()
![]() ;
;
![]()
С учетом этого, уравнение (16) имеет следующий вид:
![]() ,
или
,
или
![]() (16)
(16)
Уравнение (16) называется изображением по Лапласу для уравнения (15). Полином, стоящий в левой части уравнения (16), носит название характеристического полинома.
Уравнение 0,08р2 + 0,26р +1 =0 называется характеристическим уравнением.
Для анализа объекта управления обычно используют два вида типовых возмущения:
Х

 = 1[t]
– единичный скачек
= 1[t]
– единичный скачек
Х

 =[t]
– мгновенный импульс
=[t]
– мгновенный импульс
Решение Y(t) при X = 1[t] называется переходной характеристикой объекта управления h(t). Решение Y(t) при X = [t] называется импульсной характеристикой (функцией веса) объекта w(t).
Следует отметить, что весовая функция w(t) является производной от функции переходного процесса h(t).
Решение дифференциального уравнения ищется в виде суммы экспонент. Вид решения зависит от входного сигнала.
Для звена второго порядка эти решения имеют вид:
![]() (17)
(17)
![]() (18)
(18)
Здесь
р1;
р2
– корни характеристического уравнения,
которые определяются, как
![]() ;С1,С2
– постоянные интегрирования, определяемые
из начальных условий.
;С1,С2
– постоянные интегрирования, определяемые
из начальных условий.
Следует обратить внимание на величину . В случае, когда >1, дискриминант положителен и корни р1; р2 получаются вещественными. Переходной процесс называется монотонным.
В
случае, когда 0<=<1,
дискриминант отрицательный и корни р1;
р2
получаются
комплексными, вида
![]() где
где![]() .
В этом случае, выражение (17) можно
представить в виде:
.
В этом случае, выражение (17) можно
представить в виде:
![]() (19),
(19),
а выражение (18) в виде:
![]() (20).
(20).
Здесь - степень затухания амплитуды (учитывает вещественную часть корней характеристического уравнения); - круговая частота колебаний выходной переменной (учитывает мнимую часть корней характеристического уравнения); А – начальная амплитуда колебаний, - фазовый сдвиг.
Переходной процесс, получающийся при решении такого вида, называется колебательным.
Значение постоянных можно найти по выражениям:
![]()
![]()
![]()
![]()
Для варианта «Пример» 0<<1 (=0448). Параметры переходного процесса будут: =4,389; =8,76; А=1,119; =1,106. Тогда по (19) и (21)
![]() (22)
(22)
![]() (23)
(23)
Для получения монотонного процесса прибавим к единицу. Тогда при >1 (=1,448): р1= -9,798 , р2= -24,448, а по (17) и (18) получаем:
![]() (24)
(24)
![]() (25)
(25)
По приведенным выражениям строим графические характеристики, изображенные на рис.5 и рис.6.
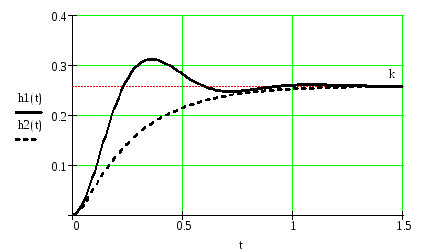
Рис. 3. Переходные характеристики объекта при >1 и 0<<1

Рис. 4. Импульсные характеристики объекта при >1 и 0<<1
Уравнение (16) можем переписать следующим образом:
![]() (26)
(26)
Выражение
вида
![]() при нулевых начальных условиях, называют
передаточной функцией объекта управления.
при нулевых начальных условиях, называют
передаточной функцией объекта управления.
В случае, когда к дифференциальному уравнению объекта управления применяют преобразование Фурье:
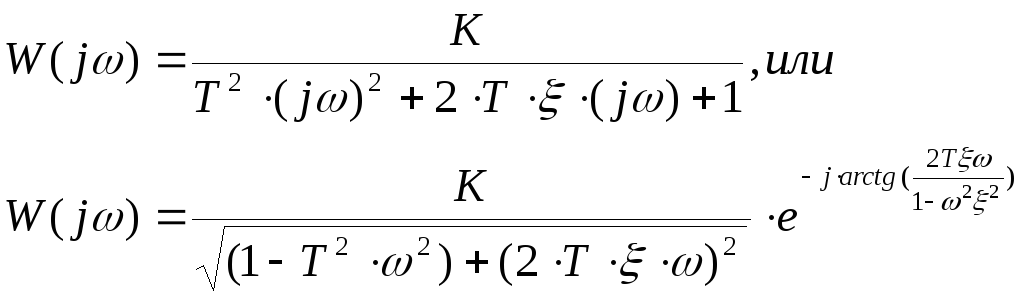 (27)
(27)
Выражение (23) называют амплитудно-фазовой частотной характеристикой (АФЧХ) объекта управления, поскольку выражение, являющееся коэффициентом перед экспонентой, характеризует зависимость амплитуды колебаний, а показатель экспоненты – фазового сдвига от частоты.
АФЧХ можно разбить на две составляющие:
Амплитудно-частотную характеристику (АЧХ) – А()
Фазо-частотную характеристику (ФЧХ) - ()
АФЧХ
объекта второго порядка имеет вид:
![]() ,
поэтому:
,
поэтому:
АЧХ:
![]() (28)
(28)
ФЧХ:
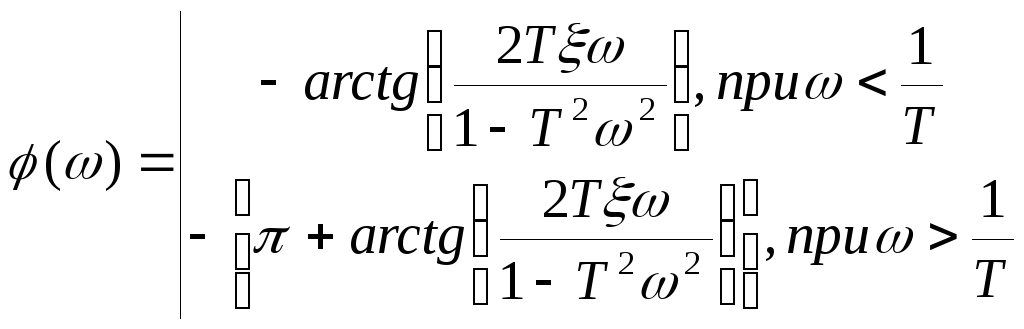 (29)
(29)
Следует отметить, что АФЧХ является комплексным числом, поэтому может быть представлена в виде:
![]()
Здесь Р() называется вещественной частотной характеристикой (ВЧХ), а Q() – мнимой частотной характеристикой (МЧХ), при этом:
![]() ;
;
![]()
Для рассматриваемого объекта АФЧХ имеет вид:
![]()
то есть:
![]() ;
;
![]() (30)
(30)
АФЧХ объекта строится в виде годографа на комплексной плоскости, при этом по оси абсцисс откладывают ВЧХ , а по оси ординат – МЧХ. Для варианта «Пример» получены графики, изображенные на рис. 5. Один для апериодического звена (=1,448>1), а другой для колебательного звена (0< =0,448 <1).

Рис. 5. Амплитудно-фазовая частотная характеристика
объекта управления
Выходят обаграфика из одной точки (K=0.258, i0), и приходят в начало координат, но форма их разная.
Фазо-частотная и амплитудно-частотная характеристики для =1,448>1 и 0< =0,448 <1, варианта "Пример", приведены на рис. 6 и рис.7.
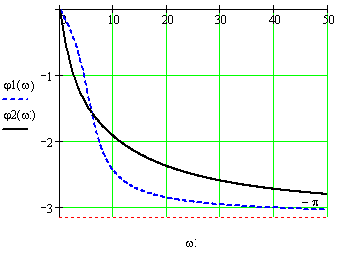
Рис. 6. Фазо-частотные характеристики
ФЧХ показывает зависимость фазового сдвига колебаний на выходе объекта управления относительно колебаний на его входе в зависимости от частоты колебаний входной величины. По частотным характеристикам объекта можно судить о многих параметрах системы управления, в частности, о ее устойчивости, что будет рассмотрено в следующей работе.
АЧХ показывает зависимость амплитуды колебаний выходной величины Y(t) от частоты изменения входной величины X(t). Для колебательного объекта (0<<1) частота, которой соответствует наибольшая амплитуда, является резонансной частотой.
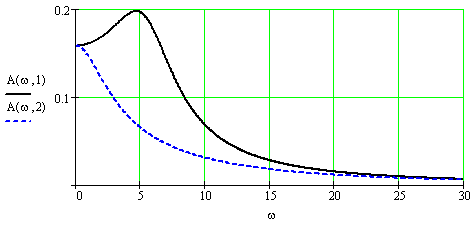
Рис.7Аамплитудно-частотные характеристики