.
. при
при 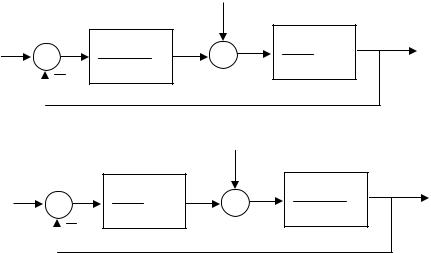

g |
|
|
|
|
|
|
|
|
у |
||
|
|
|
|
|
Wф (р) |
|
Wн (р) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИЭ ФЗ НЧ
Приведенная непрер. часть Рис. 1
Обозначения на структурной схеме: ИЭ - идеальный импульсный элемент,
ФЗ - формирователь с передаточной функцией Wф (s), НЧ - непрерывная часть с передаточной функцией Wн (s).
В данной работе предполагается, что формирователь представляет собой фиксатор нулевого порядка с передаточной функцией:
W |
(s) = |
1− e |
−sT |
(1) |
|
. |
|||
ф |
s |
|
|
|
|
|
|
|
|
Так как ерТ = z при Z - преобразовании, передаточная функция непрерывной
приведенной части запишется так: |
|
||||||
W |
(s) = |
z −1 |
|
|
Wн(s) |
|
(2) |
|
|
||||||
пнч |
|
z |
|
s |
|
||
|
|
|
|
||||
Переходя к z - изображениям, по выражению (2) |
получаем дискретную переда- |
||||||
точную функцию импульсной разомкнутой системы с фиксатором нулевого порядка
|
z −1 |
W |
|
(s) |
|
|||
W (z) = |
|
|
ZL |
н |
|
. |
(3) |
|
z |
|
|
||||||
|
|
|
s |
|
|
|||
Здесь ZL[.] обозначает символическую запись перехода от непрерывного преобразования Лапласа к Z - преобразованию.
После этого записывается передаточная функция замкнутой дискретной системы и производится анализ системы.
В данной лабораторной работе передаточная функция непрерывной части системы задается в виде звена второго порядка:
Wн(s) = as2 +Kbs +1
Коэффициенты передаточной функции и период квантования Т задаются преподавателем. Для работы может быть задан и другой вид передаточной функции непрерывной части системы 2-го или 3-го порядка.
211
3. Задание на лабораторную работу
При заданных коэффициентах передаточной функции непрерывной части
системы и заданном периоде квантования Т |
находят передаточную функцию |
замкнутой дискретной системы, и система проверяется на устойчивость. |
|
Изучается влияние изменения коэффициента усиления системы K и периода |
|
квантования Т на характеристики системы. |
|
Изменяют коэффициент усиления. В блоке |
W вводят коэффициенты переда- |
точной функции Wн (s), причем принимают |
K = А. Заданный период квантова- |
ния Т устанавливается в блоке идеального импульсного элемента. Подбирается диапазон изменения коэффициента К шаг K так, чтобы число точек на каждой ветви корневого годографа было бы в пределах 10 - 12, и примерно половина точек находилась в области устойчивости, остальные - вне этой области. (Ограничения программы: начальное значение К не должно равняться 0). Полученный график распечатывается на принтере или срисовывается с экрана монитора с помощью курсора.
Для двух коэффициентов усиления на ветвях годографа: один - для K в области устойчивости, другой - для K в области неустойчивости, нужно получить амплитудно-фазовые характеристики и перенести их в отчет.
Изменяют период квантования Т. Устанавливают значение коэффициента усиления из области устойчивости, а период квантования в блоке идеального импульсного элемента обозначают через параметр.
Работа 5. Исследование параметров релейной позиционной системы
1. Цель работы
Целью работы является исследование влияния параметров релейной позиционной системы управления на характеристики отработки заданных перемещений и определение значений параметров, обеспечивающих оптимальный режим по быстродействию.
212
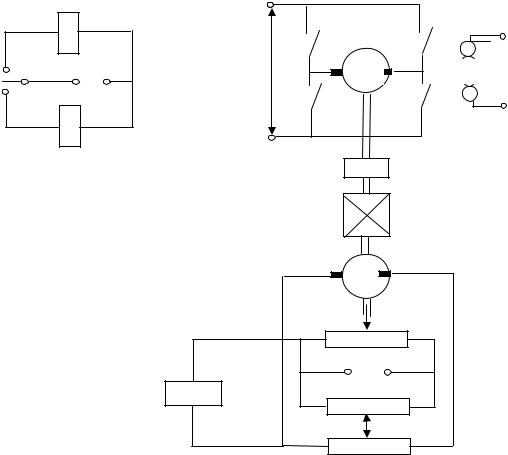
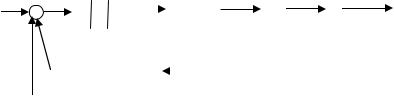
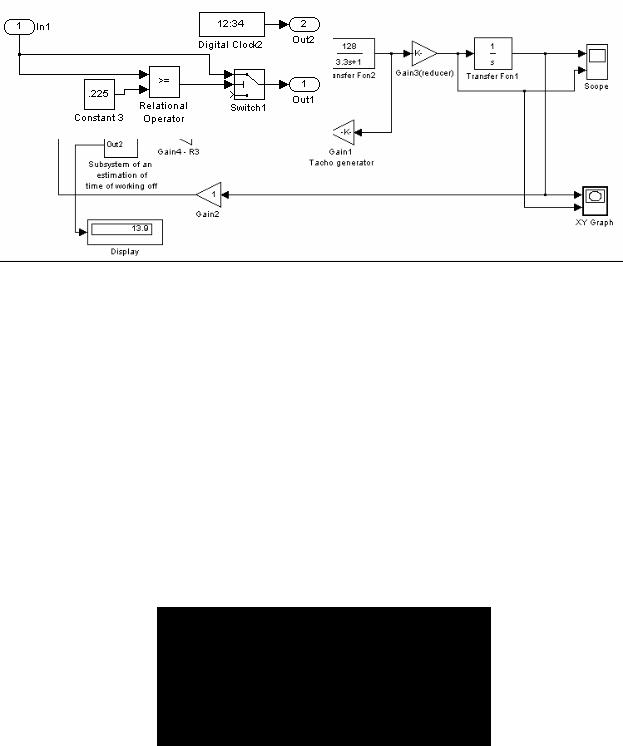
Рис.3
Компьютерная модель (рис. 3) полностью повторяет структурную схему рис.2 в части цифровых значений параметров системы. Отличия от структурной схемы следующие.
Совмещенный узел сравнения структурной схемы заменен двумя раздельными узлами. Коэффициент kос представлен также двумя коэффициентами усиления: Gain1 моделирует коэффициент передачи тахогенератораkТГ , Gain4 эквивалентен потенциометру обратной связи по скорости R3. Переключатель Switch с двумя блоками Constant 1 и Constant 2 заменяет силовые реле Р1 и Р2.
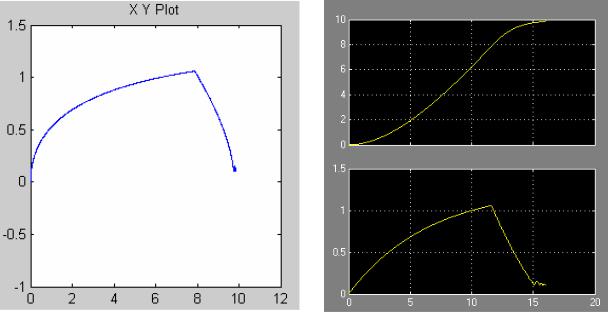
Осциллограф Scope делает доступным наблюдение скорости и угла поворота выходного вала двигателя; осциллограф XY Graph строит фазовые траектории процессов отработки заданных перемещений.
Рис. 4
Подсистема оценки времени отработки заданного рассогласования (Subsystem of an estimation of time of working off), представленная на рис.4, необходима для определения оптимальной по времени настройки исследуемой системы. Подсистема имеет один вход и два выхода. На вход подается сигнал с датчика скорости (с потенциометра R3). Выход Out1 подсоединен к узлу сравнения контура скорости, выход подсистемы оценки времени (Out2) подключен к цифровому дисплею, на экране которого выводится цифровое значение времени отработки в секундах.
215
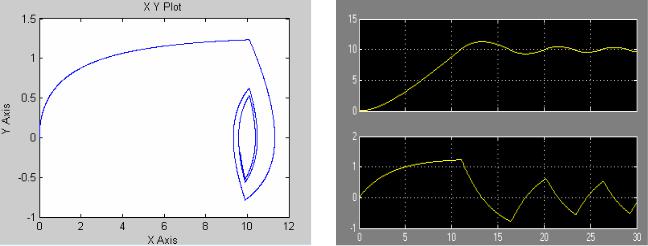
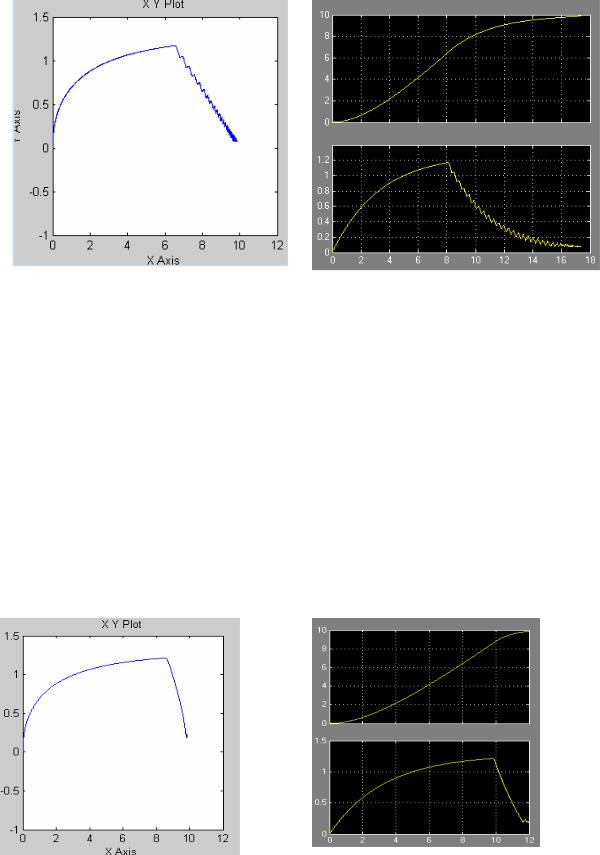
Рис.6
Контур |
Амплитуда |
Частота |
Положения |
– |
– |
Скорости |
0,04 |
2,86 |
|
|
|
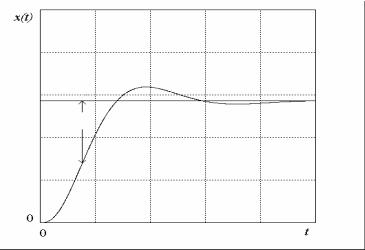
2. Определить значение коэффициента передачи Gain 4, соответствующее оптимальному режиму (отсутствие на фазовой плоскости скользящего и колебательного режимов).
Найденное значение Gain 4 равно 0,4; время отработки заданного перемещения 12 с.
Рис. 7
217