

2891 МЧПС к.р
..pdfОформление шага 2
1)Начертить эскиз расчетного сечения с указанием размеров по образцу рисунка 3. Размеры вертикальных и горизонтальных элементов сечения указаны в приложении 1, а толщина листов – в исходных данных.
2)Заполнить три столбца таблицы 4 и рассчитать zc . Показать на эскизе положение точки С и оси y.
3)Заполнить таблицы 4 и 5, дать примеры расчета J y 'i , Jz 'i , Jy , Jz . Определить
значения моментов сопротивления изгибу относительно осей z и y для точек 1, 6.
3. ВЕСОВАЯ НАГРУЗКА РАМЫ
Вертикальная нагрузка рамы складывается из собственного веса рамы, веса тормозного оборудования, веса подрессоренной части тяговых двигателей передачи и системы первичного подвешивания, а также веса кузова, приходящегося на одну тележку (приложение А).
Величина реакций рессорных подвесок определяется из условия, кН:
R = |
2Пст − Рнп , |
(3.1) |
|
4 |
|
где 2ПСТ – нагрузка на ось, кН (таблица 2 исходных данных); РНП – вес неподрессоренных частей, отнесенный к одной оси, кН.
Вес неподрессоренных частей складывается из половины веса тягового двигателя, весов колесной пары, букс и частично системы рессорного подвешивания и кожухов
зубчатой передачи, кН: |
Рр |
|
|
|
|
|
|
|
|
Рнп = Ркп + 2Рб + 2 |
+ 2 |
2Ркож |
+ |
Рд |
= 38 + |
Рд |
. |
(3.2) |
|
|
3 |
|
3 |
|
2 |
|
2 |
|
|
Нагрузка от веса кузова РК определяется как разность веса электровоза, приходящегося на одну тележку, и веса тележки. Эта нагрузка передается через четыре подвески.
Вес тележки определяется как сумма весов боковин и шкворневой балки по интенсивности равномерно распределенной нагрузки q, веса концевых балок по интенсивности – 0,2q, веса тяговых двигателей и неподрессоренных частей. Численное
значение q можно определить исходя из условного выражения, кН/м: |
|
q = 2,2 + 120F, |
(3.3) |
где F – площадь поперечного сечения боковины рамы, м2, определенная на предыдущем шаге.
Оформление шага 3
1)Рассчитать реакции рессорной подвески R.
2)Самостоятельно вывести расчетную формулу и определить величину
сосредоточенной нагрузки от веса кузова РК.
11

3)Показать все вертикальные нагрузки рамы на расчетной схеме (рисунок 1) с указанием их величин в кН.
4)Показать на чертеже тележки (выносками) элементы, составляющие неподресооренную нагрузку.
4.НАПРЯЖЕНИЯ В ОПАСНОМ СЕЧЕНИИ РАМЫ ТЕЛЕЖКИ
ОТ ВЕСОВОЙ НАГРУЗКИ
Полная симметрия рамы и ее нагрузки относительно продольной х и поперечной у осей позволяет, как было выше указано, рассчитывать 1/4 часть рамы. При этом расчетная схема приводится к плоскому изгибу консольной балки, жестко заделанной
одним концом. |
|
|
|
|
Расчетный изгибающий момент в заделке, кН·м: |
|
|||
Мy = R (хp1 + хp2 ) – 0,5ql2 – 0,2qbl – 0,25РК · хк. |
(4.1) |
|||
Напряжения рассчитываются обычным способом в МПа с учетом знака |
|
|||
σ |
в1 |
= M y 10−3 . |
(4.2) |
|
|
W |
y1 |
|
|
|
|
|
|
|
Здесь Мy в кН·м, Wy1 в м3.
Напоминаем, что 1 МПа = 103 КПа = 106 Па [Н/м2] = 1 Н/мм2. Положительными считаются напряжения растяжения, отрицательными – сжатия.
Оформление шага 4
1)Изобразить расчетную схему в масштабе, рисунок 4.
2)Рассчитать изгибающий момент Мy и построить эпюры.
3)Определить в МПа напряжение σв, для точки сечения 1.
0,5l |
|
|
xк |
0,2qb |
|
0,25PК |
ql |
|
R |
R |
|
xр1 |
|
|
|
xр2 |
|
|
l |
|
|
|
|
Рисунок 4 – Расчетная схема четверти рамы тележки
12
5. ДОПУСТИМАЯ СКОРОСТЬ ДВИЖЕНИЯ ЭЛЕКТРОВОЗА В КРИВОЙ
Величина скорости движения в кривой ограничивается из-за возрастающих боковых давлений от колес на рельсы и из-за неприятных ощущений человека (дискомфорта) при действии поперечных ускорений. Чрезмерное увеличение боковых давлений может иметь своим следствием недопустимое отжатие рельса или вползание гребня колеса на рельс. Очевидно, что наибольшее боковое давление будет от наружного рельса на первое по ходу колесо (направляющее усилие).
Безопасность движения и устойчивость рельсо-шпальной решетки пути обеспечиваются, если направляющее усилие от рельса на первую колесную пару не превышает 90 кН. Для определения допустимой скорости движения в кривой
необходимо |
решить |
систему уравнений |
равновесия |
сил, действующих |
на тележку |
|||||||||
(рисунок 5), при условии у1 = 90 кН. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
y1 + y2 – C – 2f ПСТ cos α1 ± 2f ПСТ cos α2 = 0; |
|
(5.1) |
|||||||
|
|
y |
x − y |
x |
− С x − 2 f |
П |
СТ |
x2 + S2 − 2f П |
СТ |
х2 + S2 |
= 0 , |
(5.2) |
||
|
|
1 |
1 |
2 |
2 |
c |
|
1 |
|
2 |
|
|
||
где у1 – направляющее усилие на первую по ходу колесную пару, кН; |
|
|
||||||||||||
у2 – то же, на заднюю по ходу колесную пару, кН; |
|
|
|
|
|
|||||||||
C – значение |
центробежной |
силы |
для массы |
электровоза, приходящейся на |
||||||||||
тележку,кН; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f = 0,25 – коэффициент трения между колесом и рельсом; |
|
|
|
|||||||||||
f ПСТ cos α1 – проекция силы трения на ось у, |
|
|
|
|
|
|||||||||
x1 и х2 – расстояния от полюса поворота до осей колесных пар, м; |
|
|
||||||||||||
2 f П |
СТ |
х2 + S2 |
– |
момент силы трения относительно |
полюса |
поворота, кН·м, |
||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(считается положительным при направлении по ходу часовой стрелки); S = 0,8 м – половина расчетного расстояния между кругами катания колес.
Ориентировочно величина допустимой скорости движения в кривой без возвышения VД, может быть рассчитана в первом приближении по эмпирическому выражению, км/ч:
|
V ' |
= |
|
|
350 |
ρ |
|
|
− 17,5 , |
(5.3) |
|
|
|
2ПСТ − 140 |
|||||||||
|
Д |
|
|
|
|
||||||
где ρ – радиус кривой, м. |
|
|
|
|
|
|
|
|
|
|
|
Более точно значение скорости движения в кривой без возвышения VД и в кривой |
|||||||||||
с возвышением VДВ можно определить по приведенным ниже формулам, км/ч: |
|
||||||||||
VД |
= 7,95 |
ρ |
|
|
С |
, |
|
|
|
|
(5.4) |
|
|
|
|
|
|
|
|||||
|
|
|
2ПСТ |
|
|
|
|
|
|||
V |
= 7,95 |
ρ |
С |
+ |
h |
, |
(5.5) |
||||
2ПСТ |
|
||||||||||
ДВ |
|
|
|
|
|
S |
|
||||
где h – возвышение наружного рельса в кривой, м;
13

С = |
2 |
2ПСТ |
|
VД' |
|
– центробежная сила, кН; |
(5.6) |
|
g |
3,62 |
ρ |
||||
|
|
|
|
|
здесь g = 9,81 м/с2 – ускорение свободного падения.
0.5fРСЦ  y2 С
y2 С
Ω α2  α1
α1
0
0.5fРСЦ
0.5fРСЦ y1
y1
x
0.5fРСЦ |
2S 2b |
|
x2 2а xc
x1
y
Ω – полюс вращения; РСЦ – сила сцепления
Рисунок 5 – Схема сил, действующих на тележку при движении в кривой
Для дальнейших расчетов можно задаться диапазоном возможных значений полюсного расстояния хс от наибольшего перекоса тележки хmin = 1 м до хmax = хснп (м)
хснп = |
Δρ 10 |
−3 |
(5.7) |
2a |
, |
||
|
|
|
где ρ – заданный радиус кривой, м; ∆ – суммарный зазор для колесной пары в кривой заданного радиуса, мм:
для ρ ≥ 350 м ∆ = 1520 – 1506 = 14 мм; для ρ = 349 ÷ 300 м ∆ = 1530 – 1506 = 24 мм; для ρ ≤ 299 м ∆ = 1540 – 1506 = 34 мм.
Оформление шага 5
1)Изобразить схему сил, действующих на колесные пары при движении в кривой,
изаписать систему уравнений равновесия сил, действующих на экипаж.
2)Рассчитать ориентировочное значение VД' .
3)Рассчитать значения VД и VДВ .
4)Рассчитать хснп.
14
6. СИЛЫ, ДЕЙСТВУЮЩИЕ НА РАМУ ТЕЛЕЖКИ ПРИ ДВИЖЕНИИ В КРИВОЙ
Полную систему сил, действующих на раму тележки при движении в кривой, можно рассматривать как состоящую из двух независимых подсистем, одна из которых возникает под действием центробежной силы, а другая – под действием сил трения при проскальзывании бандажей относительно рельсов.
6.1. Нагрузки, возникающие под действием центробежной силы
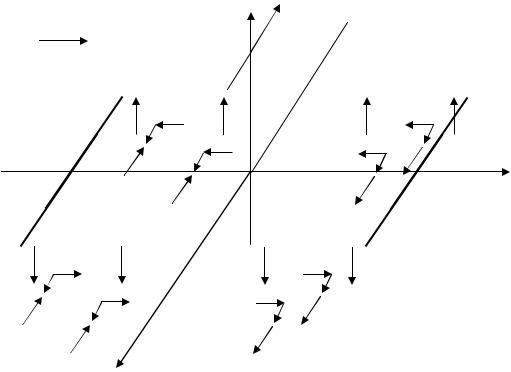
Центробежные силы распределены по всей массе движущегося экипажа. Для расчета распределенные центробежные силы приводятся к их равнодействующей, приложенной в центре масс движущегося тела. Так как центр масс расположен выше уровня осей колесных пар, то образуется момент, который перераспределяет вертикальные реакции рессорных подвесок. В результате боковина, расположенная со стороны наружного рельса кривой, оказывается перегруженной на величину 4RС, а боковина, обращенная внутрь кривой, будет разгруженной на ту же величину. Схема действия сил показана на рисунке 6.
C
|
|
V |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
III квадрант |
|
|
IV квадрант |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
Nр2 |
|
|
RC |
|
|
RC |
Nр1 |
RC |
|||||
|
|
|
|
HC |
|
Nр2 |
|
|
Nр1 |
HC |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
Hр |
|
|
|
|
|
|
|
|
|
Hр |
|
|
|
|
|
|
|
|
|
HC |
|
0 |
|
|
HC |
|
|
x |
||||
|
|
|
|
|
|
|
Hр |
|
Hр |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
II квадрант |
|
|
|
I квадрант |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
Nр2 |
|
|
RC |
|
|
|
RC |
|
Nр1 |
|
RC |
|
|
|
|||
|
|
HC |
|
|
Nр2 |
|
|
|
N |
|
|
H |
|
|
|
|||
|
|
|
|
|
|
|
|
|
р1 |
|
C |
|
|
|
||||
|
Hр |
|
HC |
|
|
|
|
HC Hр |
|
|
|
|||||||
|
|
|
Hр |
|
|
|
|
Hр |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
y
Рисунок 6 – Схема сил, действующих на раму тележки при движении в кривой
Величина центробежной силы подрессоренных масс CП, отнесенной к раме одной тележки, определяется для допустимой скорости движения в кривой без возвышения по формуле, кН:
С |
= |
4ПСТ − 2PНП |
VД2 |
. |
(6.1) |
|
3,62ρ |
||||||
П |
|
g |
|
|
||
|
|
15 |
|
|
|

Перераспределение вертикальных реакций может быть вычислено из условия равновесия тележки в плоскости yz, для чего достаточно составить одно уравнение
моментов сил относительно оси х: |
|
Σ Мx = 4RС · 2b – CП (hc – 0,5Dб) = 0, |
(6.2) |
где hc = 2,2 м – высота центра тяжести подрессоренных масс относительно уровня головок рельсов;
Dб = 1,25 м – расчетный диаметр колеса по кругу катания;
b – половина расчетной длины поперечных стержней рамы, м.
Из этого уравнения определяется искомая перегрузка RС. Горизонтальные реакции HС (кН), приложенные к буксовым направляющим рамы, принимаются равными между
собой и определяются выражением: |
|
|
|
|
|
|
Н |
С |
= |
СП |
. |
(6.3) |
|
8 |
||||||
|
|
|
|
6.2. Рамные силы, возникающие вследствие проскальзывания бандажей относительно рельсов
Принудительный поворот тележки без качения колес приводит к проскальзыванию бандажей относительно рельсов. Силы трения между колесами и рельсами препятствуют повороту колесных пар. Принудительный поворот колесных пар происходит под действием сил, передаваемых на буксы от рамы.
В плане колесная пара находится под действием системы сил, передаваемых на нее от рельсов и через поводки от боковин рамы тележки. Значит, со стороны колесных пар на боковины рамы действуют силы Nр, которые стремятся сдвинуть боковины относительно друг друга. Чтобы их вычислить, необходимо спроецировать силы трения на плоскости круговкатанияколесизатемпривестиихкбоковинам. Расчетпроизводитсяпоформуле, кН:
|
f |
П |
|
S . |
|
|
N = |
|
СТ |
sin α |
|
(6.4) |
|
|
2 |
|
||||
рi |
|
i |
b |
|
||
Рамные силы рассчитываются для движения в кривой с допустимой скоростью VД
при h = 0, т.е. без возвышения наружного рельса.
Очевидно, что sin αi |
= |
S |
, где абсциссы х1 |
и х2 |
определяются соответственно |
||
x2 |
+ S2 |
||||||
|
|
|
|
|
|||
|
|
i |
|
|
|
|
|
абсциссе полюса вращения хc при положении тележки в кривой для допустимой скорости движения (см. рисунок 5), принимая хс = хmax.
Схема действия продольных сил Nр на раму тележки показана на рисунке 6.
Как видно из рисунка, продольные усилия стремятся повернуть раму в горизонтальной плоскости. Этому повороту препятствуют буксы, закрепленные на шейках осей колесных пар. В результате возникают поперечные горизонтальные реакции Нр, приложенные к буксовым направляющим. Величина этих реакций рассчитывается из
условия равновесия рамы, выражаемого уравнением, кН·м:
16
2Hp · а = (Np1 + Np2) b, |
(6.5) |
откуда легко определяется искомая реакция Нр, кН.
Оформление шага 6
1)Рассчитать центробежную силу СП, кН; реакции RС и НС, кН.
2)Определить рамные силы Np1 и Np2 , кН; реакции Hр, кН.
3)Изобразить расчетную схему рамы в рекомендованном масштабе по примеру
рисунка 6. На схеме показать рассчитанные величины сил.
7.НАПРЯЖЕНИЯ В ОПАСНОМ СЕЧЕНИИ РАМЫ ПРИ ДВИЖЕНИИ
В КРИВОЙ
Система сил RС, НС, Nр, Нр создает в заделке консоли два изгибающих момента:
момент Мy, действующий в вертикальной плоскости, и момент Мz, действующий в горизонтальной плоскости. Здесь и далее для расчета напряжений выбирается четверть рамы, передняя по ходу со стороны наружного рельса, т. е. располагающаяся в IV квадранте координатной системы xy. Именно для этой четверти суммарные напряжения от сил в кривой σкр оказываются наибольшими. Направление движения локомотива
показано стрелкой на рисунке 6.
Для определения напряжений в расчетном сечении необходимо составить уравнения изгибающих моментов Му и Мz, учитывая знаки и плечи сил, действующих в
плоскостях хz и ху.
Сжатие боковины силами Nр и кручение силами НС и Нр не учитываются вследствие малости вызываемых ими напряжений, не имеющих существенного значения
при ориентировочном расчете на прочность.
Оформление шага 7
1)Изобразить расчетную схему для части боковины в IV квадранте.
2)Самостоятельно составить уравнения для определения моментов сил в опасном
сечении, действующих на тележку при движении в кривой.
3)Рассчитать изгибающие моменты.
4)Изобразить эпюры изгибающих моментов в масштабе.
5)Определить в МПа напряжения в точках 1 и 6 опасного сечения с учетом знака
(таблица 6).
Таблица 6 – Напряжения в расчетных точках 1 и 6, МПа
Расчетные параметры |
Точки сечения |
||
1 |
6 |
||
|
|||
Напряжения от изгиба относительно оси у σу |
|
|
|
Напряжения от изгиба относительно оси z σz |
|
|
|
Суммарные напряжения σкр |
|
|
|
17 |
|
|
|
8. СИЛЫ, ДЕЙСТВУЮЩИЕ НА РАМУ ТЕЛЕЖКИ ПРИ РАБОТЕ ДВИГАТЕЛЕЙ В ТЯГОВОМ РЕЖИМЕ
Тележка представляет собой сложную механическую систему, основными элементами которой являются рама, колесные пары, тяговые двигатели, редукторы и подвешивание. В режиме тяги между элементами системы возникают внутренние взаимодействия, вызывающие дополнительные напряжения σт. В проекте рассчитывается
рама тележки, поэтому здесь рассматривается только система сил, приложенных к раме.
На раму действуют силы тяги FД, которые передаются от колесных пар и букс через буксовые поводки. Сила тяги двух двигателей через шкворневую балку передается на раму кузова и далее на автосцепку. Одновременно на кронштейны подвески двигателей на раме тележки действуют силы от корпуса двигателя (реакций двигателя) PДТ, величина которых определяется по формуле, кН:
РДТ = FДDб , (8.1) 2LД
где LД – расстояние в метрах от оси колесной пары до оси шарнира подвески двигателя,
которое определяется по чертежу тележки (приложение А).
Схема действия сил показана на рисунке 7. Как видно из схемы, пары активных сил РДТ уравновешиваются парами реактивных RТ. Поскольку известны активные силы и все плечи, нужно самостоятельно составить расчетное выражение для определения
величины RТ.
V |
z |
|
|
|
|
0,25F |
Д |
|
|
RТ |
|
|
R |
0,25FД |
RТ |
|||
|
|
|
|
|
|
|
|
|
|
Т |
|
|||||
|
|
RТ |
|
|
0,25FД |
|
0,25FД |
|
|
|||||||
|
|
PДТ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
x |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ш |
|
|
|
|
0 |
|
PДТ |
|
||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
z |
|
|
|
|
|
|
|
|||||
RТ |
|
2FД |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
RТ |
|
RТ |
|
0,25FД |
|
RТ |
|
|
|||||||
|
|
|
|
|
|
|||||||||||
0,25FД |
|
0,25FД |
|
|
|
|
|
|
|
|
|
|||||
|
0,25FД |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
y |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
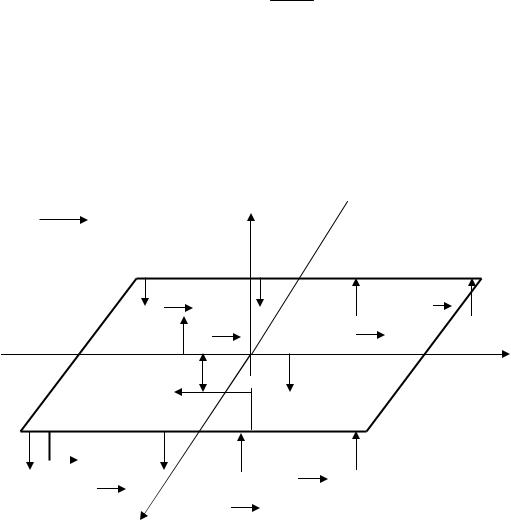
Рисунок 7 – Схема действия сил в тяговом режиме |
|
|||||||||||||||
Необходимо обратить внимание на действие системы сил Σ0,25FД и 2FД, где FД – сила тяги одного двигателя. Если вы правильно определили все размеры в расчетной
схеме, эта система сил не должна поворачивать раму.
18
Система сил определяется для всех расчетных режимов движения, т.е. для V = 0,
VД, VДВ, VК (конструкционной скорости).
Расчетная сила тяга двигателя принимается максимальной из условия ограничения
по сцеплению при заданных скоростях движения, кН:
- для электровозов постоянного тока
F |
= ψ 2П |
|
|
|
|
|
3 |
|
− 0,0007V |
|
2П |
|
|
|
|
|
СТ |
= |
0,28 |
+ |
|
|
|
СТ |
; |
(8.2) |
|||||||
|
|
|
||||||||||||||
д |
|
|
|
|
50 |
+ 20V |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
- для электровозов переменного тока |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
= ψ 2П |
|
|
|
|
|
4 |
|
|
2П |
|
|
|
|
|
|
F |
СТ |
= |
0,28 |
+ |
|
− 0,0006V |
СТ |
. |
|
(8.3) |
||||||
|
|
|
||||||||||||||
Д |
|
|
|
|
50 |
+ 6V |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Оформление шага 8
1) Рассчитать силы тяги, а также соответствующие силы на подвесках двигателей
РДТ.
2)Самостоятельно составить расчетное выражение и определить величины Rт .
3)Заполнить таблицу 7.
4)Вычертить расчетную схему в рекомендованном масштабе по рисунку 8. На схеме показать величины сил для движения с допустимой скоростью в кривой без возвышения.
Таблица 7 – Расчетные значения сил в тяговом режиме, кН
Режим |
FД |
РДТ |
RТ |
V = 0 км/ч |
|
|
|
V = VД, км/ч |
|
|
|
V = VД В, км/ч |
|
|
|
V = VК, км/ч |
|
|
|
Примечание – Для ВЛ80т и ВЛ82м VК = 110 км/ч, для ВЛ10 VК =100 км/ч.
9.НАПРЯЖЕНИЯ В ОПАСНОМ СЕЧЕНИИ РАМЫ ОТ СИСТЕМЫ СИЛ, ДЕЙСТВУЮЩИХ В ТЯГОВОМ РЕЖИМЕ
Рассмотренная выше система сил изгибает боковины рамы в вертикальной плоскости. Для определения напряжений необходимо составить выражение для изгибающего момента в заделке для левой передней четверти рамы, т. е. части боковины над набегающим колесом. По значению момента вычисляются напряжения σт в крайних точках расчетного сечения, МПа:
|
М |
|
|
σт = |
y |
. |
(9.1) |
W |
|||
|
y1, 6 |
|
|
19 |
|
||
Оформление шага 9
1)Записать расчетное выражение для изгибающего момента в заделке и определить его величину.
2)По значению момента вычислить в МПа напряжения σт в 1-й и 6-й точках сечения для четырех значений скорости: 0, VД, VД В, VК.
3)Результаты расчетов оформить в виде таблицы.
10. КОСОСИММЕТРИЧНАЯ НАГРУЗКА РАМЫ ТЕЛЕЖКИ
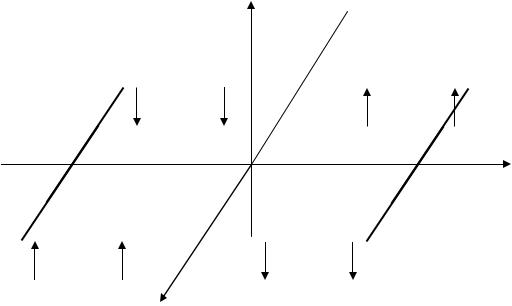
Если одно колесо тележки окажется выше или ниже остальных, то вследствие статической неопределимости системы рессорного подвешивания в четырех точках произойдет перераспределение реакций. Изменение уровня одной из опорных точек может быть вызвано местной неровностью пути, нарастающим возвышением наружного рельса при входе в кривую, разностью диаметров колес, просадкой рессор и пружин, а также неправильной регулировкой опорных гаек (см. чертеж тележки – приложение А). В результате рессорные комплекты каждой буксы будут иметь различные прогибы и, следовательно, различные реактивные усилия. Если проанализировать распределение отдельных реакций, то окажется, что на раму действует система вертикальных сил, попарно симметричных относительно диагоналей. Эта система называется кососимметричной нагрузкой RК, которая стремится повернуть боковины рамы вокруг поперечной оси в противоположные стороны (рисунок 8).
z
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RК |
|
RК |
|
|
RК |
|
RК |
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RК |
|
|
RК |
RК |
|
|
RК |
|
|
||||
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Рисунок 8 – Схема кососимметричной нагрузки |
|
|
|||||||||
20