

ГОРОЧНЫЕ СИСТЕМЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
Горочные устройства автоматики и телемеханики применяются на сортировочных станциях, на которых осуществляется расформирование вагонов и формирование из них поездов, следующих на большие расстояния без переработки. Важнейшим элементом такой системы является горка.
План сортировочной горки: путевой план
профиль

Выбор сортировочного пути определяется маршрутным заданием, которое вводится в систему оператором с аппарата управления.
В соответствии с ним системой горочной автоматической централизации (ГАЦ) стрелки спускной части горки устанавливаются в нужное положение.
С целью увеличения пропускной способности горки их перевод осуществляется последовательно по мере подхода к ним очередного отцепа.

Горочная автоматическая централизация (ГАЦ)
Объектами управления и контроля в горочной автоматической централизации являются стрелки. Управление стрелочными электроприводами осуществляется с пульта-табло ГАЦ.
Каждый отцеп, скатываясь, сам «продвигает» свое маршрутное замыкание от стрелки к стрелке, воздействуя на схемы трансляции задания.
Связывающим звеном между отцепами и схемными зависимостями являются укороченные нормативно разомкнутые рельсовые цепи.
В нормально-разомкнутых рельсовых цепях, при свободном состоянии контролируемого участка, путевое реле находится в обесточенном состоянии. Преимуществами нормально-разомкнутых рельсовых цепей являются более высокое быстродействие при фиксации занятости контролируемого участка пути (так как реле быстрее притягивает якорь, чем отпускает) и меньший расход кабеля (поскольку питающий и релейный конец рельсовой цепи совмещены).
Однако в нормально-разомкнутых рельсовых цепях не контролируется исправность элементов и целостность рельсовых нитей, поэтому они применяются только на сортировочных горках.

Внастоящее время на сортировочных горках находиться в эксплуатации релейная система автоматической горочной централизации в блочном оформлении, получившая название БГАЦ-ЦНИИ.
Ее схемное обеспечение позволяет реализовать 64 маршрута в расчете на полную горку (8 пучков по 8 путей в каждом пучке).
Различают ручной (Р), маршрутный (М), программный (П) и автоматический (А) режимы работы устройств БГАЦ.
Перевод стрелок вручную является резервным, производиться с помощью стрелочных рукояток.
Врежиме М набор маршрута осуществляется с помощью восьми маршрутных кнопок
вмомент подхода очередного отцепа к головной стрелке.
При этом первое нажатие определенной из них воспринимается устройствами как номер пучка, а второе как номер пути в пучке.
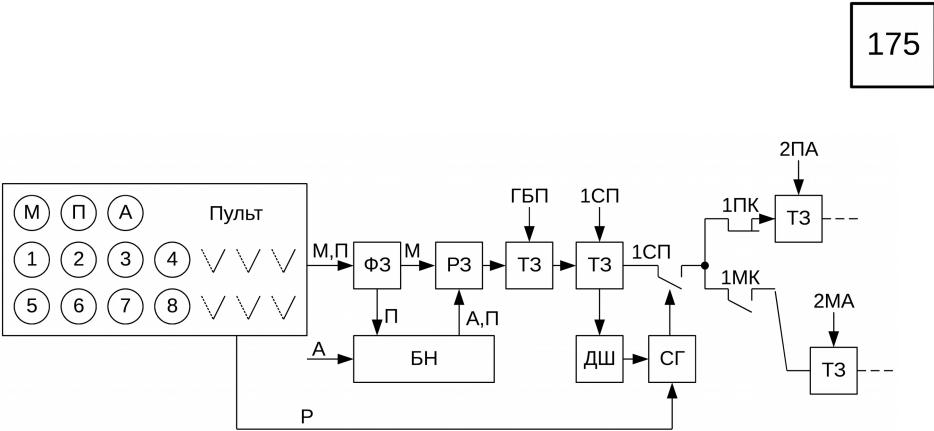
Структурная схема БГАЦ
ФЗ - блок формирования задания |
ГБП – горочный блок памяти |
|
РЗ - блоки регистрации задания |
СГ – блок головной стрелки |
|
ТЗ - блок трансляции задания |
||
|
||
ДШ - дешифратор |
|

Номер маршрута зашифровывается в блоках формирования задания (ФЗ)
и передается далее на стартовую позицию в блоки регистрации задания (РЗ). При условии свободности блоков трансляции (ТЗ) номер маршрута продвигается до блока первой стрелки, где дешифруется (ДШ).
Если в результате требуется перевод стрелки, то он осуществляется с помощью блока СГ. Продвижение маршрутного задания до следующей стрелки произойдет при вступлении отцепа на путевой участок первой стрелки,
амаршрутное задание в блоках ТЗ до нее гасится.
Врежиме П с помощью маршрутных кнопок осуществляется заблаговременное формирование маршрутных заданий в соответствии с расположением номеров отцепов в сортировочном листе.
В зашифрованном виде они располагаются в блоках накопителя БН.
Врежиме А маршрутные задания поступают из горочного программно-задающего устройства ГПЗУ, в котором содержаться необходимая информация о составе, подлежащем роспуску.

Система автоматической регулировки скорости (АРС)
Скорость скатывания отцепов с горки и остановка их в нужном месте подгоночных путей регулируется вагонными замедлителями.
Автоматическое управление ими осуществляется с помощью системы АРС.
В общем случае вагонные замедлители располагаются на трех тормозных позициях: верхней ВТП (между горбом горки и головной стрелкой), средней СТП (перед пучковыми стрелками)
и нижней НТП (в начале путей сортировочного парка).
По способу создания тормозного эффекта вагонные замедлители делятся на зажимающие колесные пары вагонов и не зажимающие (электромагнитные, плунжерные гидравлические, башмачные и др.).
Зажимающие замедлители содержат механизм, действие которого основано на захвате бандажей колес шинами (балками), выступающими над головкой рельсов с обеих его сторон. Замедлитель работает по принципу клещей.
Замедлитель имеет два положения – расторможенное, когда в тормозном цилиндре сжатый воздух отсутствует, и тормозные балки разведены, и заторможенное, при котором тормозные балки под воздействием сжатого воздуха сближаются и захватывают колесо с двух сторон.
Сила торможения зависит от давления сжатого воздуха в тормозном цилиндре, что определяется состоянием электропневматических клапанов системы АРС.

В общем случае скорость выхода отцепа из тормозной позиции описывается уравнением
Vвых 
 Vpc2 2ax lx Vдоп2 ,
Vpc2 2ax lx Vдоп2 ,
где Vpc – расчетная скорость соударения отцепов (5км/ч);
ax – ускорение движения отцепа в пределах зоны регулирования; lx – расстояние от тормозной позиции до стоящих на пути вагонов;
Vдоп – дополнительная скорость, которую должен иметь отцеп для преодоления сопротивлений от кривых и стрелок по маршруту своего следования.
Ускорение ax определяется блоком ИЗУ по временным засечкам t1 и t2
прохождения отцепом двух звеньев головного измерительного участка, ограниченных педалями П1, П2, П3.

Структурная схема АРС

Скорость выхода отцепа определяется как среднее арифметическое весовых характеристик вагонов, входящих в отцеп (легкой, легко-средней, средней, средне-тяжелой, тяжелой и особо тяжелой).
Число прогибов n фиксируется блоком вычисления весовой категории и длинны отцепов ВВКД.
С выхода блока ВВКД рассчитанное значение скорости Vвых1
поступает на устройства управления верхней тормозной позицией УТП1, |
|
где сравнивается с фактической скоростью скатывания отцепа |
Vф1 , |
измеренной радиолокационным измерителем РИС1.
По результатам сравнения выбирается степень торможения отцепа.