

4.2. Трасса дороги и ее элементы
Для графического представления трассы дороги используют две проекции: горизонтальную и вертикальную (рис. 4.2).
Горизонтальную проекцию в уменьшенном масштабе называют планом трассы.
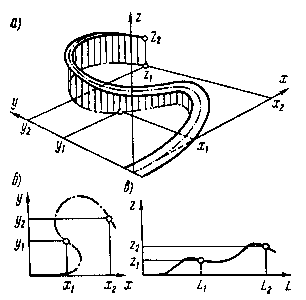
Рис. 4.2. Ось дороги как пространственная кривая:
а – вид полотна дороги в аксонометрии; б план дорог; в продольный профиль
Развернутую в плоскости чертежа вертикальную проекцию оси дороги называют продольным профилем. План трассы изображают на карте местности, разбивая его на прямые, кривые и пикеты – 100 метровые участки (рис. 4.3).
.
Рис. 4.3. План трассы
Прямолинейные участки характеризуют направлением (румбом) и длиной. В местах изменения направления трассы намечают углы поворота (α). Их измеряют между продолжением трассы и новым направлением, оценивая в градусах и минутах. Для удобства движения в углы поворота вписывают кривые. Круговые кривые характеризуют радиусом кривизны – R, длиной кривой – К, тангенсом – Т, биссектрисой – Б и домером – Д (рис. 4.4).

Рис. 4.4. Элементы угла поворота
Зависимости, описывающие эти величины, имеют следующий вид:
![]() , (4.2)
, (4.2)
![]() , (4.3)
, (4.3)
![]() , (4.4)
, (4.4)
Д=2Т-К. (4.5)
Движение по криволинейному участку отличается от движения по прямой возникновением центробежной силы, которая стремится сместить автомобиль с дороги и вызывает перераспределение нагрузки между колесами, что отражается на устойчивости и управляемости автомобиля. Кроме того, при быстром движении по кривым на двухскатном поперечном профиле проезжей части, водитель и пассажиры испытывают неприятное ощущение наклона во внешнюю сторону кривой.
Для снятия
отрицательного эффекта резкого
возникновения центробежной силы при
переходе с прямолинейного участка на
круговую кривую целесообразно на
участках сопряжения прямой и круговой
кривой, имеющей постоянную величину
радиуса (R),
вписывать кривые с постоянно уменьшающимся
радиусом (от![]() доR)
–
переходные
кривые.
доR)
–
переходные
кривые.
Таким образом,
план трассы![]() будет
состоять из прямолинейных участков,
круговых и переходных кривых.
будет
состоять из прямолинейных участков,
круговых и переходных кривых.
4.3. Кривые в плане
4.3.1. Круговые кривые
При движении автомобиля по кривым в результате действия центробежной силы значительно ухудшаются условия устойчивости автомобиля. Кроме того, водители и пассажиры испытывают существенный дискомфорт из-за наклона автомобиля, а угловая деформация шин (боковой увод), вызванная центробежной силой, сопряжена с повышенным износом шин и расходом топлива. Необходимость снизить влияние этих негативных факторов ложится в основу расчета минимально допустимых значений радиусов круговых кривых в плане.
К центру тяжести автомобиля, движущегося по кривой, приложены две основные поперечные силы:
центробежная сила (С), направленная во внешнюю сторону закругления
![]() , (4.6)
, (4.6)
где m – масса автомобиля, кг; V – скорость автомобиля, м/c; R – радиус кривой, м.

Рис. 4.5. Схема сил, действующих на автомобиль при движении по кривой
– вес автомобиля (G) – составляющая сила веса, параллельная поверхности проезжей части (Gi). Эта может иметь знак плюс или минус в зависимости от направления уклона проезжей части.
Проецируя обе силы на ось, параллельную поверхности проезжей части и представив Gi как m·g·sinα, получим следующую зависимость:
![]() , (4.7)
, (4.7)
где Y – результирующая сила, стремящаяся сместить автомобиль с дороги и называемая поперечной силой, α – угол наклона проезжей части (tg α = i).
Так как угол α достаточно мал, то можно принять, что cosα ≈ 1, а sinα ≈ tgα = i. Тогда:
![]() . (4.8)
. (4.8)
Преобразовав полученную зависимость, найдем величину радиуса кривой, допустимую из условия ограничения поперечной силы Y:
 . (4.9)
. (4.9)
Из зависимости
4.9. видно, что радиус закругления зависит
не от величины поперечной силы, а от его
отношения к весу автомобиля
![]() .
Эту величину называюткоэффициентом
поперечной силы.
Таким образом, зависимость для определения
необходимого значения радиуса кривых
в плане примет окончательный вид:
.
Эту величину называюткоэффициентом
поперечной силы.
Таким образом, зависимость для определения
необходимого значения радиуса кривых
в плане примет окончательный вид:
![]() . (4.10)
. (4.10)
Величина коэффициента поперечной силы может быть нормирована исходя из различных требований, что отразится на минимально допустимой величине радиуса кривой. Определим эту величину для следующих условий: устойчивость автомобиля против заноса, удобство движения, экономичность движения по криволинейным участкам.
Устойчивость автомобиля против заноса обеспечивается достаточным поперечным сцеплением колес автомобиля с покрытием, величина которого должна быть больше cдвигающей силы:
![]() ,
,![]() (4.11)
(4.11)
где Gсц – сцепной вес автомобиля; φ2 – коэффициент поперечного сцепления.
Разделив левую и правую часть уравнения на величину веса автомобиля, получим условия устойчивости 2.
Допуская возможность мокрого грязного покрытия (в этом случае 2 = 0,2 для асфальтобетонного покрытия) и предусматривая максимальную величину поперечного уклона in = 0,06 (из условия устойчивости против сдвига остановившегося автомобиля на покрытии с гололедом) получим минимальную допустимую величину радиуса кривой из условия устойчивости против заноса (с некоторым запасом из-за округления):
![]() . (4.12)
. (4.12)
Удобство движения по криволинейным участкам оценивается ощущениями водителя и пассажиров, которые они испытывают при проезде кривой. Наблюдения показали [4], что при = 0,1 пассажир, не глядящий на дорогу, не замечает, что он едет по кривой, при = 0,15 движение по кривой ощущается слабо, а при = 0,2, пассажир испытывает уже легкие неудобства, которые переходят в ощущение толчка при въезде на кривую с = 0,3. Следует отметить, что нервно-эмоциональная напряженность водителя, всегда сопутствующая ведению автомобиля, остается практически постоянной на прямых и на кривых с коэффициентом 0,15. Поэтому, приняв коэффициент = 0,15 за комфортные условия и выполнив расчеты, аналогичные сделанным выше, получим минимальную величину кривых в плане из условия комфортности:
![]() . (4.13)
. (4.13)
Экономичность движения по криволинейным участкам достигается за счет снижения износа шин и сокращения расхода топлива, связанных с движением по кривым малого радиуса, при увеличении радиуса кривых. Исследования показывают, что при = 0,17 смещение колеса вбок (увод колеса), связанное с действием поперечной силы, происходит на угол бокового увода = 1,8, а это в свою очередь вызывает перерасход топлива на 40%, а износ шин увеличивается в 10-15 раз по сравнению с движением по прямым.
Чтобы снизить эти показатели примерно в 3 раза надо уменьшить величину коэффициента поперечной силы примерно до 0,1. Тогда величина радиуса из условия обеспечения экономичного движения на кривых, с учетом выше приведенных допущений и расчетов будет:
![]() . (4.14)
. (4.14)
Таким образом, чтобы удовлетворить все перечисленные требования, радиус кривых в плане целесообразно рассчитывать при значении 0,10.
В российских строительных нормах и правилах для обоснования минимальных радиусов принято = 0,12 для расчетной скорости 150 км/ч и = 0,18 для скорости 20 км/ч. В результате в нормах на проектирование приводятся следующие значения радиусов в зависимости от скорости движения (табл. 4.1):
Т а б л и ц а 4.1
|
Показатель |
Величина показателя | |||||||
|
Расчетная скорость, км/ч |
150 |
120 |
100 |
80 |
60 |
50 |
40 |
30 |
|
Категория дороги |
I |
II |
III |
IV |
V |
|
|
|
|
Наименьшие радиусы на трудных участках, м |
1000 |
600 |
400 |
250 |
125 |
100 |
60 |
30 |
Одновременно строительные нормы рекомендуют во всех случаях, когда это возможно, устраивать кривые с радиусами не менее 3000 м.