

Трансмембранный перенос
.pdf
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Рисунок 4.4.4 - Переходная функция САУ с ПИ-регулятором: |
|
|
||||||||||
|
|
|
|
|
1 – входное воздействие; 2 - переходная функция. |
|
|
|||||||
|
Качество переходного процесса: |
|
|
|
|
|||||||||
|
|
коэффициент перерегулирования: 0% ; |
|
|
|
|
||||||||
|
|
время переходного процесса: Tп 0.6с ; |
|
|
|
|
||||||||
|
|
статическая ошибка: 0% . |
|
|
|
|
||||||||
|
Определим передаточную функцию ПИ-регулятора: |
|
|
|
||||||||||
|
W |
( p) K |
P |
Ki ; |
|
|
|
|
|
|
|
|
||
|
PI |
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
( p) 3,46 10 . |
|
|
|
|
|
|
|
|
||||
|
PI |
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим передаточную функцию разомкнутой системы с PI- |
|||||||||||||
регулятором: |
|
|
|
|
|
|
|
|
|
|
||||
W |
( p) W |
рс |
( p) W ( p) |
; |
|
|
|
|
|
|
|
|||
PC |
|
|
|
|
PI |
|
|
|
|
|
|
|
|
|
W |
( p) |
|
|
|
|
1 |
(3,46 10) |
3.46 p 10 |
|
3.46 p 10 |
|
. |
||
PC |
|
0.0035 р2 0.35 р 1 |
|
p |
(0.0035 p2 0.35 p 1) p |
|
0.0035 p3 0.35 p2 |
p |
|
|||||
|
|
|
|
|
||||||||||
|
Зная передаточную функцию разомкнутой системы, определим |
|||||||||||||
передаточную функцию замкнутой системы: |
|
|
|
|
||||||||||
|
WЗС |
( p) |
|
Wpc ( p) |
; |
|
|
|
|
|
||||
|
Wpc ( p)Woc ( p) |
|
|
|
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
|
WЗС |
( p) |
|
|
3.46 p 10 |
. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0.0035 p3 0.35 p2 |
4.46 p 10 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лист |
Изм. Лист |
№ докум. |
|
Подпись Дата |
|
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
45 |
||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||

4.5 Исследование качественных показателей САУ
Исследование системы на устойчивость методом Гурвица
Этот метод позволяет определить устойчивость САУ, если характеристическое уравнение замкнутой системы представлено в виде:
Для этого строится главный определитель Гурвица по следующему правилу: по главной диагонали выписываются все коэффициенты от  до
до  в порядке возрастания коэффициентов. Столбцы вверх от главной диагонали заполняются коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – коэффициентами с последовательно убывающими индексами. На месте коэффициентов с индексами, большими порядка характеристического уравнения и меньшими нуля, проставляют нули.
в порядке возрастания коэффициентов. Столбцы вверх от главной диагонали заполняются коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – коэффициентами с последовательно убывающими индексами. На месте коэффициентов с индексами, большими порядка характеристического уравнения и меньшими нуля, проставляют нули.
Выделяя в главном определителе Гурвица диагональные миноры,
получаем определитель Гурвица низшего порядка. Номер определителя Гурвица определяется номером коэффициента по диагонали, до которого составляют данный определитель.
 ,
,  ,
,  .
.
Определение: чтобы САУ была устойчива, необходимо и достаточно,
чтобы определитель Гурвица и его диагональные миноры имели знаки,
одинаковые со знаком первого коэффициента характеристического уравнения замкнутой САУ. При  для устойчивости САУ необходимо и достаточно выполнение условий:
для устойчивости САУ необходимо и достаточно выполнение условий:
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
46 |
|
||
|
|

[1]
Составим определитель Гурвица для нашей системы:
|
|
0.35 |
10 |
0 |
|
3 |
|
|
|
|
|
0.0035 |
4.46 |
0 |
. |
||
|
|
0 |
0.35 |
10 |
|
|
|
|
|||
Для этого уравнения получаем условия:
a |
|
0; |
|
a 0; |
|
a1 |
a3 |
|
a a |
|
a a 0; |
0 |
1 |
2 |
|
|
|
2 |
|||||
|
|
1 |
|
|
|
1 |
0 3 |
||||
|
|
|
|
|
|
a0 |
a2 |
|
|
|
|
1 |
0.35 0; |
|
|
|
||
|
|
|
0.35 |
10 |
|
1.561 0.035 1.526 0. |
2 |
|
|
|
|
||
|
|
0.0035 |
4.46 |
|
|
|
|
|
|
|
|
||
Все условия выполняются, следовательно, система устойчива.
Исследование системы на устойчивость по принципу годографа Михайлова
Критерий Михайлова – это частотный критерий, позволяющий судить об устойчивости замкнутой системы по поведению ее характеристического вектора на комплексной плоскости. Характеристический вектор получают путем подстановки в выражение для характеристического полинома
 ,
,
Значения  . Тогда характеристический вектор представляется комплексной величиной, определяемой как:
. Тогда характеристический вектор представляется комплексной величиной, определяемой как:
 ,
,
где
Если задаваться различными значениями  и откладывать значения
и откладывать значения  по горизонтальной, а
по горизонтальной, а  – по вертикальной осям декартовой системы координат, то будет получена кривая, называемая годографом характеристического вектора или годографом Михайлова.
– по вертикальной осям декартовой системы координат, то будет получена кривая, называемая годографом характеристического вектора или годографом Михайлова.
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
47 |
|
||
|
|

Формулировка критерия: для устойчивости системы необходимо и достаточно, чтобы ее характеристический вектор при изменении частоты от 0
до  повернулся в положительном направлении (против часовой стрелки),
повернулся в положительном направлении (против часовой стрелки),
начиная с положительной вещественной оси на число квадрантов, равное порядку характеристического уравнения.
Рисунок 4.5.1 - Годограф Михайлова
Характеристический вектор при изменении частоты от 0 до  повернулся в положительном направлении (против часовой стрелки), начиная с положительной вещественной оси на число квадрантов, равное порядку характеристического уравнения, т.е. 3. Следовательно, система устойчива.
повернулся в положительном направлении (против часовой стрелки), начиная с положительной вещественной оси на число квадрантов, равное порядку характеристического уравнения, т.е. 3. Следовательно, система устойчива.
Исследование системы на устойчивость частотным критерием Найквиста
Критерий Найквиста – это частотный критерий, позволяющий судить об устойчивости САУ, замкнутой единичной обратной связью, по виду амплитудно-фазовой частотной характеристики разомкнутой системы.
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
48 |
|
||
|
|

Для формулировки критерия рассмотрим САУ, которая в разомкнутом состоянии характеризуется передаточной функцией вида
 ,
,
где  – некоторые полиномы от
– некоторые полиномы от  , причем степень знаменателя выше или равна степени числителя.
, причем степень знаменателя выше или равна степени числителя.
Знаменатель этого выражения является характеристическим полиномом разомкнутой САУ.
Формулировка критерия. САУ устойчива в замкнутом состоянии, если годограф АФЧХ устойчивой разомкнутой системы не охватывает точки с координатами (-1, j0) на комплексной плоскости [1]. Эта формулировка справедлива как для статических, так и астатических САУ, то есть систем,
характеристическое уравнение которых содержит нулевой корень той или иной степени кратности.
Рисунок 4.5.2 - Диаграмма Найквиста |
|
Годограф АФЧХ не охватывает точки с координатами |
(-1, j0) на |
комплексной плоскости. Следовательно, система устойчива. |
|
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
49 |
|
||
|
|

4.6 Определение запаса устойчивости САУ
Запас устойчивости по модулю − это величина логарифмической амплитудно-частотной характеристики разомкнутой системы на частоте, при которой фазовая частотная характеристика имеет значение -180 град.
Запас устойчивости по фазе – это разность между значением фазовой частотной характеристики и значением 180 град при частоте среза.
Частота среза – это частота, при которой значение амплитудно-
частотной характеристики равно 0 дБ.
Рисунок 4.6 - Определение запаса устойчивости
По полученным характеристикам определили запас устойчивости системы:
запас по амплитуде – бесконечен;
запас по фазе –84.3˚ (при 10.1 рад/сек).
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
50 |
|
||
|
|
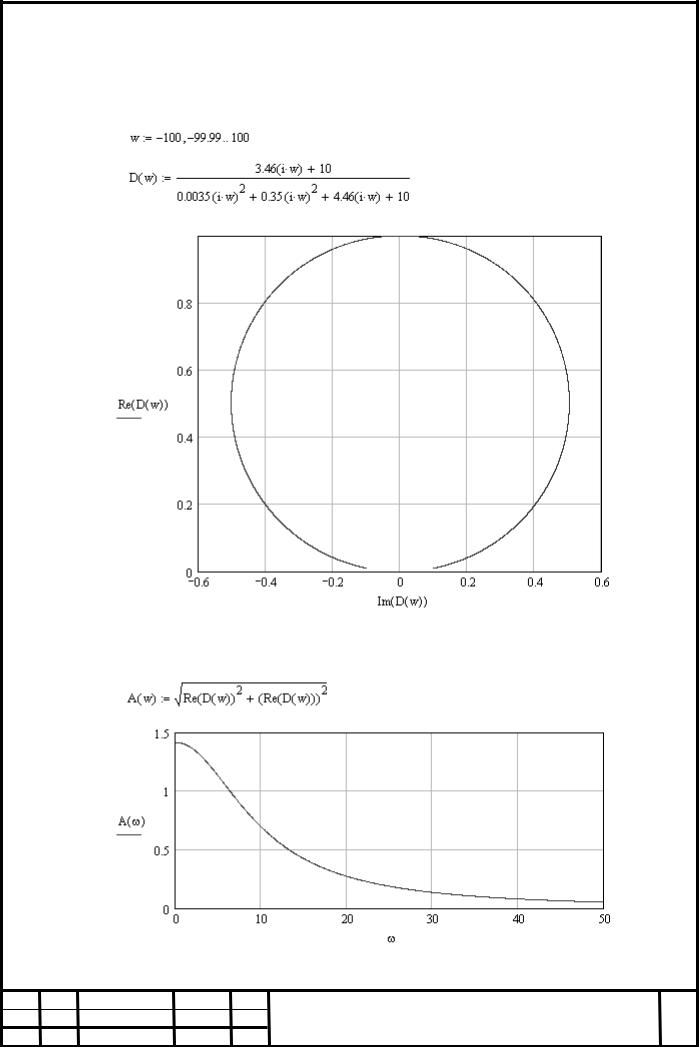
4.7Получение частотных характеристик системы
Всреде MathCAD получили следующие характеристики:
Рисунок 4.7.1 - АФЧХ замкнутой системы
Рисунок 4.7.2 - АЧХ замкнутой системы
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
51 |
|
||
|
|

Рисунок 4.7.3 - ЛАЧХ замкнутой системы
Рисунок 4.7.4 - ФЧХ замкнутой системы
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
52 |
|
||
|
|
4.8 Моделирование САУ с учетом нелинейности
Для определения параметров нелинейности системы экспериментальным путем была установлена зависимости между частотой вращения вала двигателя и питающим напряжением. Получили следующую зависимость (рис. 4.8.1):
|
120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Umax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Гц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота, |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
Umin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
5,5 |
6 |
6,5 |
7 |
7,5 |
8 |
8,5 |
9 |
9,5 |
10 |
10,5 |
11 |
11,5 |
12 |
|
-20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Напряжение, В |
|
|
|
|
|
|
|
|
|
|
||||
Рисунок 4.8.1 - Зависимость частоты вращения от величины питающего напряжения
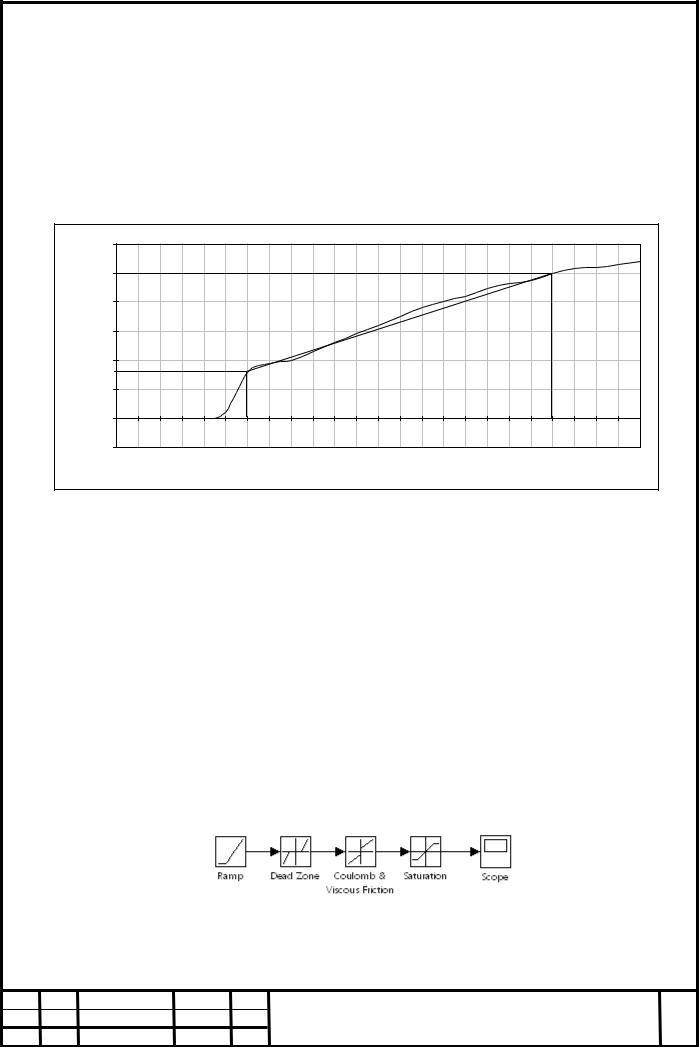
Из графика зависимости видно, что при значениях напряжения от Umin
до Umax зависимость имеет линейный характер. Но при значениях напряжения меньше 2.5 В, вращения вала не происходит, а при увеличении напряжения питания свыше 10 В частота вращения остается примерно постоянной. Данная нелинейность окажет существенное влияние на параметры системы. Поэтому необходимо провести расчет регулятора с учетом нелинейных элемента. Зададим нелинейность САУ с помощью стандартных средств пакета MATLAB (Рис. 4.8.2).
Рисунок 4.8.2 - Структурная схема участка нелинейности САУ
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
53 |
|
||
|
|

Рисунок 4.8.3 - Полученная осциллограмма участка нелинейности.
Структурная схема САУ с учетом нелинейности представлена на
рис.4.8.4.
Рисунок 4.8.4 - Структурная схема САУ с учетом нелинейности
Поведение системы с учетом нелинейных элементов представлена на
Рис. 4.8.5.
1
2
3
Рисунок 4.8.5 - Переходная функция замкнутой САУ с введенной нелинейностью: 1 – входное воздействие; 2 – нелинейность при введении ООС; 3 – передаточная характеристика системы.
|
|
Лист |
Изм. Лист № докум. Подпись Дата |
ВКР- 220200-08.КИТП-0.00.00.ПЗ |
54 |
|
||
|
|