

1.2.1 Потенційні та імпульсні сигнали
Сигнал називається потенційним, якщо інтервали часу Ті між сусідніми змінами сигналу значно більше часу реакції схеми р.
Сигнал називається імпульсним, якщо його тривалість того ж порядку, що час реакції схеми (схема повинна відреагувати на вплив імпульсного сигналу, а імпульсний сигнал повинен скінчитись відразу після закінчення перехідного процесу у схемі). Такі сигнали dx,dx,xпоказані на рисунку 6:

Оператор переходів d визначається відношенням:
Де: dx – імпульсний сигнал, який народжується зміненням потенційного сигналу з 1 на 0; x(t) – значення потенційного сигналу у даний момент часу;
x(t - t) - значення потенційного сигналу у попередній момент часу;
 Очевидно,
щоdx=1 тільки
при зміні потенційного сигналу з 1 на
0. Вважається, що абстрактний потенційний
сигнал має нескінченно круті фронти, а
для абстрактного імпульсного сигналу
у відношенні (1) t0.
Очевидно,
щоdx=1 тільки
при зміні потенційного сигналу з 1 на
0. Вважається, що абстрактний потенційний
сигнал має нескінченно круті фронти, а
для абстрактного імпульсного сигналу
у відношенні (1) t0.
Введемо позначення: x(t)=х, x(t - t)=х*. Отримаємо:
Цінність співвідношення (2) міститься у тому, що воно враховує час у явному вигляді і може використовуватися не тільки для потенційних сигналів, але й для функцій, що перемикаються, від потенційних сигналів:

Де: v=(xn ,…,x1);v*=(x*n ,…,x*1); f(v)– значення функції у даний момент часу;f(v*) - значення функції у попередній момент часу;
Із співвідношення (3) слідує, що імпульсні сигнали, які народжуються функціями, що перемикаються, від потенційних сигналів, вельми просто можуть бути одержані за допомогою основних операцій алгебри логіки. Так, якщо,
то

Д
dx=1 е:
тільки при зміні потенційного
сигналу х з 0 на 1.
е:
тільки при зміні потенційного
сигналу х з 0 на 1.
Оператор переходів визначається співвідношенням:
x=1
Де як при зміненні потенційного сигналу х з 1 на 0, так із 0 на 1.
На рисунку 7 показана схема формування імпульсного сигналу dx, яка побудована у відповідності з виразом (1)та діаграма часу, яка пояснює її роботу:

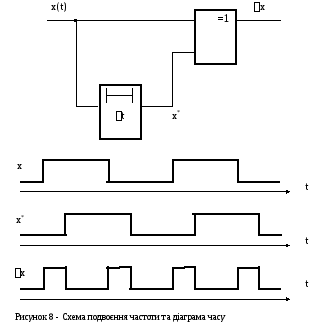
На рисунку 8 представлена схема подвоєння частоти, яка виконана у відповідності з виразом (6) та діаграма часу, яка пояснює її роботу:
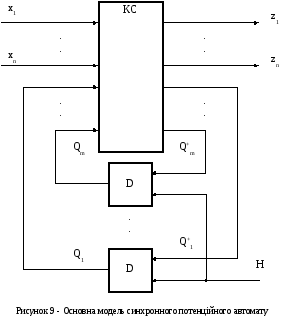
Основна модель синхронного потенційного автомату
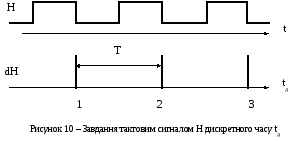
Ця модель складається із КС і синхронних ЕП, в якості яких використовуються синхронні елементи затримки D (рисунок 4) інформаційних сигналів Q+r на один період тактового сигналу Н. В синхронних ЕП тактовий сигнал впливає на них імпульсною дією у момент зміни з 1 на 0 (або з 0 на 1), а зміна інформаційних сигналів Q+r не впливає на ЕП. Вихідний сигнал Qr синхронного елементу затримки приймає значення вхідного сигналу Q+r у момент імпульсного впливу тактового сигналу Н. Тактовий сигнал Н завдає дискретний час tд=1,2,3, … (рисунок 10).
На цій підставі функціонування автомату може розглядатися тільки в ці дискретні моменти часу при дотриманні наступних умов:
вхідні сигнали х не повинні змінюватися у момент часу, коли dH=1;
перехідний процес, який виник у попередньому дискретному моменті часу tд повинен закінчитися до наступного дискретного моменту часу tд+1.
Функція переходів Q та функція виходу Z завдають також синхронний автомат при заміні t на tд і t+t на tд+1. Мінімальне значення періоду тактового сигналу повинно бути не менше максимального часу перехідного процесу в автоматі. При дотриманні цієї умови КС можна синтезувати не вільної від змагань і використовувати будь – яке кодування внутрішніх станів автомату.