Shpory_Lyshnikov(d_4_kyrs)
.doc
|
16.с помощью посадочных РЛС осущ-ся наземный контроль за снижением ВС по линии курса(ЛК)и глиссады(ЛГ) путем опред-ия удаления ВС от расчетной точки приземления (ТП) и его отклонений от ЛК и ЛГ.РЛС-П явл-ся 3х-коорд. станцией, осущ-ей обзор ВП в зоне предпосадочного и посадочного маневров.Для оценки отклонений на ИУ строятся 2 изобр-ия: курсовое и глиссадное.Отобр-ие пространства бывает 2 видов: клиновидное и прямоугольное.На ИУ, кроме ЛК и ЛГ,отображаются линии равных высот (ЛРВ),линии равных отклонений ЛРО от ЛК и ЛГ,метки дальности,метки азимутов и метки углов места.Дальность откладывается по гориз.оси и может иметь линейный и нелинейный масштабы(опорные ч/з 5 км,ост.через 1) Для РЛС-П выбран сантим.диапазон волн(около 3.2см),т.к. предъявляются выс.требов.по разреш.способности и точности опред-ия отклон-ия ВС от ЛЗП.этот дипазон позв-ет создать антенны приемлемых размеров.Антенная и высокочастотная части РЛС размещаются вблизи ВПП.Зону обзора выбирают так, чтобы захватить точку касания самолетом ВПП и перекрыть сктор простр-ва не менее чем на ±10° от оси ВПП в гориз.плоскости и от 0 до 7° в верт.плоск-ти. РЛС резервирована.основная аппаратура, обрабатыв-ая инфу, находится в технич.зале,индикаторы и пульты управл.-в зале КДП.Для длинных ВПП РЛС устан-ся таким образом, чтобы посадка была возможна с обоих направлений. Для оценки значения оклонения ВС от ЛЗП применяют 3 способа(в завис-ти от удаления ВС):1.визуально сравнивают линейное отстояние середины отметки ВС от ЛЗП с отстоянием ЛРО от ЛЗП и умножают на ∆l;2.сравнивают величину отметки ВС с отклонением середины отметки от ЛЗП;3.сравнивают отклонение отметки от ЛЗП и линейн.расст-ие м/у контр-ми угловыми метками. Систематические погрешности при определении отклонения отметок ВС в основном зависят от точности изображения линий, определ-их заданную траекторию посадки, линий и меток, используемых для определения отклонений отметки от ЛЗП.Случайные погрешности вызываются неточностью определения середины отметки ВС и интерполяции расстояния м/у ЛК,ЛГ и ЛРО или м/у метками азимутов и углов места.СКП определения середины отметки зависит от угловой величины отметок по азимуту и углу места. Их значения опр-ся шириной ДН антенны,увеличенной на угловой размер диаметра пятна луча ЭЛТ. Размер отметки при приближении ВС увел-ся из-за того,что с ростом мощности отражений от ВС сигнал принимается все большей шириной ДНА,а также вследствие изменения ракурса ВС. МАХ допустимая погрешности не должна превосходить: В гор.плоскости-0,006Д или 9м(большее иззначений) В верт.плоск.-0,004Д или 9м По дальности- (30+0,03Д1)м Д-дальность от антенны до ВС Д1-расст.от антенны до опорной точки РМС
17.РП-4Г используется в автоматизир.и неавтоматизир.системах УВД. В состав входят: антенная часть, аппаратура технического зала, аппаратура диспетчерского поста и кабельная линия трансляции. Антенная часть состоит из 2 антенных систем с опорно-поворотными устройствами, колонн с приводами и датчиков угловой информации. Антенная система состоит из курсовой АК и глиссадной антенн АГ. Антенна глиссады сканирует в пределах 1…6°, верхняя граница зоны обзора достигает 2200 м. Антенна курса сканирует в пределах —16...+ 4°. ВЧ-энергия АГ и АК подается через волноводные вращающиеся и качающиеся сочленения, к которым энергия подводится по волноводам размерами 10X30 мм. В волноводном тракте у излучателей антенн размещаются поляризационные решетки для изменения плоскости поляризации радиоволн от линейной до круговой для защиты от сигналов, отраженных от гидрометеоров.Антенный домик представляет собой контейнер, в котором размещены: приемопередатчики, устройства СДЦ, устройства защиты от несинхронных помех, контрольное индикаторное устройство, а также другая аппаратура и вспомогательное оборудование.Аппаратура технического зала КДП состоит из аппаратуры обработки полученной с линии трансляции координатной и угловой информации, генератора линий посадки. Аппаратура диспетчерского поста посадки размещается в линейно-аппаратном зале КДП и состоит в основном из аппаратуры, обеспечивающей работу индикаторных устройств, самих ИУ и пультов управления РЛС и посадкой. РЛС имеет двухканальный приемопередатчик. Магнетроны типа МИ-99А с частотами /\=9265 МГц и /25=9425 МГц имеют электромеханическую автоподстройку частоты в диапазоне ±10 МГц. Мощность в импульсе 150 кВт. Длительность излучаемых ВЧ-импульсов т = 0,5 мкс. Время задержки между двумя излучаемыми импульсами 1мкс. При передаче импульсы разных частот объединяются в один
|
|
19. МРЛ используются для обнаружения и наблюдения различных атмосферных образований, измерения их координат и количественных характеристик. По данным ИКАО, причиной более половины летных происшествий и катастроф являются ограниченные метеоусловия, среди которых наибольшую роль играет грозовая обстановка. Одно из основных средств получения информации о метеообстановке — метеорологическая РЛС. МРЛС позволяют производить наблюдение за атмосферными образованиями в гораздо большей области пространства, чем это доступно для визуальных наблюдений. При этом РЛС используются в любое время суток. При использовании РЛС время, необходимое для получения общей картины распределения образований в области действия станции, весьма мало (около неск-их десятков секунд). МРЛС представляют собой обычные импульсные РЛС, имеющих ряд особенностей, связанных с условиями распространения и отражения электромагнитных колебаний. Эти объекты состоят из большого числа мелких частиц, расположенных относительно близко друг от друга и занимающих некоторый объем пространства. Под действием ветра и силы тяжести эти частицы находятся в непрерывном движении и вследствие этого изменяется их относительное расположение. Каждая частица отражает радиоволны, и РЛС принимает результирующий сигнал. Существование нескольких оптических длин волн для обнаружения различных метеорологических образований вызывает необходимость использования в МРЛС одновременно нескольких длин волн. РЛС могут эффективно использоваться для метеонаблюдений только в сантим.и миллим. диапазонах волн с одновременным использованием нескольких диапазонов. В МРЛС применяется 3 типа индикаторов- ИКО, индикатор дальность- высота (ИДВ) и амплитудный индикатор (ИА). МРЛ имеет следующие режимы работы:: режим кругового обзора-антенна вращается в гориз.плоскости с частотой 6 об/мин при пост.угле наклона в вертик.плоскости. Режим ступенчатого обзора- антенна вращается в гориз.плоскости, а ее наклон в вертик.плоскости изменяется после оборота антенны. Режим вертик.обзора- антенна качается в вертик.плоскости, с частотой 2 качания в 1 мин.при постоянном азимуте. Режим вертик.зондирования- антенна неподвижна, но может быть установлена в любом направлении в гориз.плоскости и под любым углом в пределах 1...105°.
20. РЛС ОЛП; назначение, состав, размещение и особенности функционирования. Радиолокатор ОЛП предназначен для обзора летного поля в условиях плохой видимости. Информация, получаемая с помощью этого радиолокатора, может использоваться диспетчером ДПР и СДП. Радиолокатор ОЛП работает на волне 8мм. Передатчик магнетронного типа вырабатывает зондирующие импульсы, обеспечивающие дальность действия локатора приблизительно 8км. Для излучения зондирующих импульсов и приема отраженных сигналов используются отдельные антенны, расположенные друг над другом. Такое конструктивное решение позволило отказаться от антенных переключателей и уменьшить минимальную дальность действия станции до 100м. Частота вращения антенны 36 об/мин. Ширина диаграммы направленности антенн в горизонтальной плоскости составляет 14´, в вертикальной - 18°. Длительность излучаемых импульсов равна 0,05 мкс. Для борьбы с сигналами от гидрометеоров используется поляризационные решетки, расположенные перед облучателями антенн. Обычно радиолокатор ОЛП размещается на каком-либо высоком здании аэропорта. Антенны закрываются радиопрозрачным укрытием. Для повышения эффективности использования радиолокаторов разработана специальная аппаратура преобразования радиолокационных сигналов в телевизионные.
33. Недостатки существующих РМС посадки метрового диапазона; MLS назначение состав, размещение, принципы функц-я, э-т показатели.КРМ располагается в районе БПРМ, а ГРМ в 300м от торца(порога) ВПП и 150м слева(справа) относительно ВПП. В критических зонах РМС необходимо убрать все препятствия(~20см) для исключения переотражения сигналов и тем самым исключить искажение глиссады. Также при выходе из равносигнальных зон курсовые и глиссадные планки резко уходят от истинных значений. MLS- точная дальномерно-угломерная система(5031…5090,7МГц; длина волны 6см), которая создает сигналы, сдвиг которых во времени является функцией угловых отклонений ВС от заданной траектории полета. Для этого используется опорное время. Система состоит из 4х наземных р.м. 1)азимутальный заод на посадку(АРМ-1) 2) обратного азимута (АРМ-2) 3)угломестным захода на посадку (УРМ-1) 4) угломестным выравнивания (УРМ-2). РМ имеет передатчик и антенное устройство типа фазированной решетки.
|
||||||||||||||||||||||||||||||||||||
 18.
Радиолокатор РП-5Г.предназначен
для работы в автоматизированных и
неавтоматизированных системах УВД.
С помощью
РП-5Г автоматически определяется
отклонение отметки ВС от заданной
линии посадки с отображением на экране
индикатора отклонения в формуляре
сопровождения (ФС). Имеется также
автоматическое предупреждение при
превышении допустимых отклонений.РП-5Г
активного ответного канала не имеет.
Автоматическое решение задачи контроля
посадки оказалось возможным в связи
с введением одновременной двухчастотной
работы РЛС и использованием микросхем
с высокой степенью ннтеграции. Работа
РП-5Г в составе АСУВД «Старт», «Спектр»
и других возможна при наличия специальной
аппаратуры сопряжения. Для этого РЛП
имеет выходы цифровой радиолокационной
информации, но, кроме этого, возможен
также вариант использования в АСУВД
всей цифровой аппаратуры отображения
РП-5Г.РЛС полностью резервирована и в
зависимости от целостности резерва
может обеспечить посадку с одного или
двух направлений ВПП ила с двух
ВПП. Антенных постов два, в каждом по
две антенны курса и глиссады (АК и
АГ).РЛС работает в диапазоне длин
3,2см (9250 и 9450 МГц).Одновременное
использование двух частот позволяет
избавиться от провалов ДНА из-за
отражений от земной поверхности,
а также уменьшить флюктуации сигналов
путем их совместной обработка. Это
дает возможность повысить вероятность
обнаружения сигналов и обеспечить
достоверное автоматическое определение
отклонений ВС относительно ЛЗП.Для
защиты от переотражений от земной
поверхности и местных предметов
приемные каналы РП-5Г имеют устройства
цифровой СДЦ, а для защиты от «слепых
скоростей» ВС применяется изменение
частоты повторения. В волноводных
каналах установлены дистанционно
управляемые устройства изменения
поляризации радиоволн от линейной до
круговой.Имеется также ЭВМУ
управления генерированием в цифровом
ТВ-преобразователе знаковой информации,
линий глиссады, курса и равных
отклонений. Эта же ЭВМ управляет
устройством вторичной обработки
информации.
18.
Радиолокатор РП-5Г.предназначен
для работы в автоматизированных и
неавтоматизированных системах УВД.
С помощью
РП-5Г автоматически определяется
отклонение отметки ВС от заданной
линии посадки с отображением на экране
индикатора отклонения в формуляре
сопровождения (ФС). Имеется также
автоматическое предупреждение при
превышении допустимых отклонений.РП-5Г
активного ответного канала не имеет.
Автоматическое решение задачи контроля
посадки оказалось возможным в связи
с введением одновременной двухчастотной
работы РЛС и использованием микросхем
с высокой степенью ннтеграции. Работа
РП-5Г в составе АСУВД «Старт», «Спектр»
и других возможна при наличия специальной
аппаратуры сопряжения. Для этого РЛП
имеет выходы цифровой радиолокационной
информации, но, кроме этого, возможен
также вариант использования в АСУВД
всей цифровой аппаратуры отображения
РП-5Г.РЛС полностью резервирована и в
зависимости от целостности резерва
может обеспечить посадку с одного или
двух направлений ВПП ила с двух
ВПП. Антенных постов два, в каждом по
две антенны курса и глиссады (АК и
АГ).РЛС работает в диапазоне длин
3,2см (9250 и 9450 МГц).Одновременное
использование двух частот позволяет
избавиться от провалов ДНА из-за
отражений от земной поверхности,
а также уменьшить флюктуации сигналов
путем их совместной обработка. Это
дает возможность повысить вероятность
обнаружения сигналов и обеспечить
достоверное автоматическое определение
отклонений ВС относительно ЛЗП.Для
защиты от переотражений от земной
поверхности и местных предметов
приемные каналы РП-5Г имеют устройства
цифровой СДЦ, а для защиты от «слепых
скоростей» ВС применяется изменение
частоты повторения. В волноводных
каналах установлены дистанционно
управляемые устройства изменения
поляризации радиоволн от линейной до
круговой.Имеется также ЭВМУ
управления генерированием в цифровом
ТВ-преобразователе знаковой информации,
линий глиссады, курса и равных
отклонений. Эта же ЭВМ управляет
устройством вторичной обработки
информации.
|
23.Способы модуляции сигналов передаваемых по каналам связи.Принципы построения цифровых систем связи.Пропускная способность канал связи.Многоканальная связь.Радиорелейная связь. Виды модуляции:частотная, амплитудная модуляция.Частотная не используется в РС тк будут слишком длинные сигналы.Данные-цифровые потоки 1 и 0.Частота-это скорость изменения фазы.Система передачи данных: Uвх123 1)дискретизация по времени(отсчеты по теореме Котельникова Т(0)=1\2*F(в))F(в)-частота верхнего спектра.в а\д РЛС 4с,в трассовых 10с. 2)квантование по уровню 3)кодирование Пропускная способность зависит от частоты(Клод Шеннон доказал что чем больше частота тем больше инф-ии можно передать)Видеосигналы являются широкополосными поэтому передаются по ВЧ кабелям с широкой полосой пропускания(неск-ко МГц) в результате амлитудно-фазовые искажения сигналов минимальны.Угловая инф-ия и служебные сигналы-узкополосные могут передаваться по проводным(телефонным узкополосным) линиям(сотни…тысячи Гц).Вся перечисленная инф-ия может передаваться также по радио релейным связям,когда кабельные линии невозможно проложить или необходимо передать инф-ию на большие расстояния.Неск-ко РС в пределах прямой видимости(70-80км).
24Назначение, решаемые задачи принципы построения сетей телеграфной связи и систем передачи данных;сети AFTN,SITA,ATN. Aeronautical fixed telecommunication network построена по радиально-узловому принципу.ЦАК(Г)—ЦКС(З)—ЦКС(Р)—ЦКС(а\д)—ОС и АРМ.ЦАК-центр автом коммутации,ЦКС-центр коммутации сообщений(зонал или районный или а\д),ОС-оконечная станция,АРМ-автом рабочее место.Возможны разные скорости передачи миним – 50 Бод(1 бод точка или тире).Используется для передачи NOTAM и различных телеграмм.ATN-это система передачи данных утвержденная ИКАО.SITA-сеть передачи данных.ACARS-американская система связи(бит\с).
25.Назначение,решаемые задачи,принципы и средства построения сетей ТЛФ и ГГС.Назначение внутренняя тел связь между членами экипажа с помощью бортовых РС а также с наземными службами.ГГС предназначена для трансляции музыкальных и информационных передач в салоны пассажиров.В передающих устройствах для преобразования звуковых колебаний в электрические применяются микрофоны и ларингофоны а в приемных устройствах для обратного преобразования телефоны и громкоговорители.Для начала передачи необходимо нажать кнопки «радио» и «СПУ» расположенных на штурвалах а у других членов экипажа в местах обеспечивающих оперативность и удобство их использования.
26.Назначение, решаемые задачи, принципы и средства построения сетей авиационной воздушной наземной радиосвязи.Спутниковые системы связи. 1)Командная РС.(VHF\ОВЧ 118,000-136,975 МГц метровые волны 3-4 метра) шаг сетки 25(тогда 720 возможных частот) или 8,333 КГц.при 8,333 КГц используются каналы связи. Rmax(км)=4√Hвс(м).При больших дальностях используются выносные радиостанции. 2)Дополнительная связь (HF\ВЧ) используется в МДП(большая дальность действия изза отражения от ионосферы).Используется на малых высотах и при отказах КомРС.рабочая частота 2-4 МГц.Шаг сетки 100 Гц(100000 возможных частот.3)дополнительная MF средневолвновая.Используется в северных широтах,частота от 500 КГц до 2 МГц.Используется при северном сиянии РС «Широта-У».4)Спутниковая связь.Спутники на геостационарной орбите.5)CPDLC-controller pilot data link communiction.типовые фразы заменяются кодовыми комбинациями и отображаются на дисплее. Требования к связи:верность передачи сообщений,надежность связи,коэффицент готовности,быстродействие,время задержки.
|
27.РСБН и посадки. Назначение, классификация, особенности РСБН различных диапазонов волн.РСБН предназначены для определения местоположения ВС в полярной системе координат по пересечению линий равных азимутов и дальностей на расстояниях не превышающих 400-500км. РСБН включают в себя наземное и бортовое оборудование, которое определяет азимут и наклонную!!! дальность. Принцип: измерение времени запаздывания ответного сигнала относительно момента посылки запросных, т.е. метод «запрос-ответ» Кроме азимутально-дальномерных радиомаяков РСБН могут содержать и посадочную радиомаячную группу (ПРМГ), состоящую из КРМ,ГРМ и ретранслятора дальномера. ПРМГ позволяет заходить на посадку в СМУ и формирует сигналы отклонения от курса и глиссады посадки, а также дальности до точки приземления. В РСБН определение азимута и дальности основано на временном методе. В VOR/DME для определения азимута – фазовый метод, а для дальности временной. По дальности, погрешностях РСБН(УВЧ 960…1215МГц) превосходит VOR/DME(ОВЧ 108,000…117,975МГц), но уступает по количеству частотно-кодовых каналов.
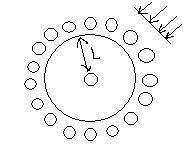
28.Автоматические радиопеленгаторы (АРП),назначение,размещение,принципы функционирования,экспл-техн показатели,органы упр-ия,контроля и индикации. АРП-это многоканальный радиоприемник с антенной в виде кольцевой решетки.При приеме радиосигналов от бортовой радиостанции разность фаз волны принимаемой наружными вибраторами и центральным вибратором зависит от направления.Обычно используются многоканальные АРП,каждый настраивается на частоту своего диспетчерского сектора.Дисп а\д зоны получает угломерную инф-ию в виде магнитного азимута,а ДПП и РЦ азимут истинный.Когда ВС выходит на связь отображается пеленг на индикаторе.
29.Приводные радиостанции. Назначение, состав, разновидности, размещение, принципы функционирования, эксплуатационно-технические показатели. Взаимодействие с бортовыми радиокомпасами АРК.Отдельные приводные радиостанции(ОПРС\NDB) являются всенаправленными маяками излучающими сигналы на частотах от 150-1750кГц(MF/СВ), каждая ОПРС имеет свой позывной в виде букв передаваемых кодом Морзе. Местоположение ВС определяется относительно радионавигационных точек (т.е. точек положение которых заранее известно) угломерным методом(т.е. метом пересечения прямых линий ). ОПРС используются совместно с АРК и применяются для навигации по принципу «полет на РС и от нее», привода ВС в район а\д посадки и выполнения предпосадочного маневра. Кроме того, ОПРС можно использовать для прослушивания команд Дисп. при отказах радиосвязи на борту ВС. Для измерения угловых координат в АРК исп-ся метод минимума. В качестве направленной антенны АРК исп-ся рамка. Метод полета точно на РС (стрелка на 0) – радиодромия. Отклонения АРК за счет действия вторичных полей – радиодевиация.
35, Функциональные дополнения к спутниковым системам навигации GBAS, ABAS, SBAS: спутниковые системы посадки, общие принципы функционирования.В системах GPS и Глонасс есть недостатки – не достаточная точность, уязвимость, поэтому нужны дополнения, чтобы улучшить параметры. Ground Based Admintation System – для для систем посадки (имеются фиксированные приемники, которые сравнивают параметры с истинными значениями)-дифференциальная система. Aircraft Based Admintation System - инерциальная навигационная система. Satellite Based Admintation System – через спутники передаются поправки. |
30. Упрощенная система посадки ОСП. Состав и размещение оборудования ОСП на а\д; его взаимодействие с АРК. Аварийная передача информации через ДПРС. Экипаж пролетает на высоте круга на ДПРМ и включает секундомер, отсчитывает время t1 и выполняет 1й разворот, отситывает t2 вып-т 2й. отситывает t3 вып-т 3й, в этот момент Кур ~=240, отсчитывает t4 вып-т 4й, в этот момент Кур ~=285,. После выпо-я 4го разворота 2 стрелки АРК должны быть на 0, если нету УС. Затем экипаж рассчитывает ТВГ, начинает снижение с Vy больше на 1м\с чем Vy глиссады и занимает 200м чуть раньше ДПРМ. После пролета ДПРМ экипж снижается точно по глиссаде с Vy указанном в РЛЭ и совершает посадку. При пролете ДПРМ и БПРМ спец.ПРМ на борту ВС принимает сигналы маркеров ДПРМ(2тире\с) и БПРМ(6 точек\с), которые излучаются строго вертикально,а специальная аппаратура отмечает пролет характерным звуком и световой индикацией. Данная система посадки как правило не используется в СМУ и заходах с прямой, т.к. экипажу не известна дальность до ВПП, а следовательно и ТВГ, которая рассчитывается выполнением коробочки. Кроме того при отказах РС, АРК можно использовать для прослушивания команд диспетчера, но связь будет только односторонней.
31.Азимутально-дальномерная система ближней навигации VOR/DME/ Назначение, состав, размещение, принципы функционирования, Э-т показатели, взаимодействие с бортовой аппаратурой «Курс МП»М\н радионавигационная система ближней навигации типа VOR\DME принята по рекомендации ИКАО в качестве основной стандартной навиг-й системы для обечпечения безопасности ВД в РА и на маршрутах. В VOR/DME для определения азимута используется – фазовый метод, а для дальности временной. Также происходит прослушивание позывных маяка. По дальности, погрешностях РСБН превосходит VOR/DME(ОВЧ 108,000…117,975МГц), но уступает по количеству частотно-кодовых каналов. В VOR по принципу амплитудной модуляции (30 Гц) измеряется сдвиг по фазе с помощью магнитного азимута. В центре стоит вибратор который излучает сигнал опорной фазы для сравнения, а вокруг вибраторы которые излучают направленные сигналы по очереди 30 раз\с.(Пр. идет отсчет 1,2,3,4 и ВС принимает данный сигнал и определяет свой азимут). В DME принцип: измерение времени запаздывания ответного сигнала относительно момента посылки запросных, т.е. метод «запрос-ответ». Rmax=4корень из Нвс. Опред-ся наклонная дальность. Существует ограничение – не более 100ВС. Бортовая аппаратура «Курс МП» предназначена для обеспечения полетов ВС по всенаправленным радиомаякам м\н навигационной системы VOR и выполнения посадок по системам ILS и «СП-50», т.е. полет на РС, прием сигналов КРМ и ГРМ – построение радиоглиссады планирования и курса.
32.РМС типа ILS, СП-50 и «Катет». Назначение, состав, размещение, принципы функционирования, э-т показатели MLS.РМС типа ILS и СП-50 принимают сигналы КРМ и ГРМ, и определяют отклонения ВС от равносигнальных зон курса и глиссады и передает эти данные в САУ для выполнения посадки в авт и директорном режимах, прослушивает позываные сигналов р.м.ILS, а также сигнализацию пролета маркеров ОПРС. В СП-50 исп-ся заход по маякам т.е. отображается отклонение ВС от-но курса и глиссады. КРМ располагается в районе БПРМ, а ГРМ в 300м от торца(порога) ВПП и 150м слева(справа) относительно ВПП. В критических зонах РМС необходимо убрать все препятствия(~20см) для исключения переотражения сигналов и тем самым исключить искажение глиссады. КРМ излучает 2 лепестка 90 и 150Гц, а КРМ 3 лепестка. 3й необходим для отображения «ложной глиссады», когда прямая снижения будет слишком крутой. На небольшом удалении от ВПП необходимо отключить АП и совершить посадку вручную, т.к. радиоглиссада замирает и резко уходит вверх… При настройке на частоту КРМ система автоматически настраивается на частоту ГРМ, которая в 3 раза больше. В системе «Катет» разворачивается телескопическая антенна на базе а\м УАЗ, которая отображает угловые координаты, (т.к. система не бетонированная – очень большие погрешности… Пр. качение при ветре .)
|