

azipod_vi_project_guide_ru
.pdfГидравлическая система рулевого механизма может быть разделена вручную на две независимых части. Однако при остановке насосы отсоединяются от гидравлического контура автоматически. В аварийной ситуации исполнительные гидравлические двигатели, которые находятся в неисправной части рулевого механизма, должны свободно вращаться. Этим наполовину уменьшается передаваемый на руль крутящий момент. Поэтому отключение от системы гидравлики при единичной неисправности выполняются вручную членами команды или автоматически, что зависит от конкретной системы аварийного управления, поставляемой с системой Azipod.
Выполнение поворота осуществляется сервоприводом для конкретного насоса путем пропорционального управления непосредственно по ходу насоса к ЛЕВОМУ или ПРАВОМУ борту. Фактически управляющие клапаны-распределители как таковые не требуются. Исполнительный механизм отрабатывает угол поворота в системе Azipod по кратчайшему пути. Это особенно удобно, если команда на изменение угла поворота примерно на 180 градусов (и более) подается рукояткой или с внешнего устройства управления.
Размеры и компоновка блока HPU могут отличаться в зависимости от гидравлической мощности, требуемой для конкретного судна.
Каждый гидромотор рулевого механизма оборудован предохранительным клапаном. Такие клапаны обеспечивают механическую защиту, открываясь и допуская поворот движителя при чрезмерных ледовых нагрузках.
ЗОНА
ОБСЛУЖИВАНИЯ
|
Отвод воды |
УСТРОЙСТВОПУСКОВОЕ |
ЭЛЕКТРОДВИГАТЕЛЯНАСОСА |
ИСПОЛНИТ. МЕХАНИЗМ |
БЛОК |
||
|
ПУСКОВОЕ |
|
|
|
УПРАВЛЕНИЯ |
УСТРОЙСТВО |
|
|
ТОРМОЗАМИ |
ПРОМЫВНО- |
|
|
|
ГО НАСОСА |
|
ЗОНА ОБСЛУЖИВАНИЯ
ИСПОЛНИТ. МЕХАНИЗМ |
|
|
ИСПОЛНИТ. МЕХАНИЗМ |
Отвод воды |
ГО НАСОСА |
|
БЛОК |
ПУСКОВОЕ |
|
УПРАВЛЕНИЯ |
УСТРОЙСТВО |
|
ТОРМОЗАМИ |
ПРОМЫВНО- |
|
Подвод воды |
|
ПУСКОВОЕ УСТРОЙСТВО |
ЭЛЕКТРОДВИГАТЕЛЯ |
НАСОСА |
|
ПУСКОВОЕ УСТРОЙСТВО |
ЭЛЕКТРОДВИГАТЕЛЯ |
НАСОСА |
ЗОНА ОБСЛУЖИВАНИЯ |
ЗОНА ОБСЛУЖИВАНИЯ
Рисунок 4-10 Пример силового гидравлического блока Рулевого устройства
Представление продуктов Azipod® серии VI 21
4.6Система охлаждения электродвигателя гребного винта
Блок воздушного охлаждения (CAU) предоставляется с двумя центробежными вентиляторами и двутрубными теплообменниками пресной воды для подключения к судовой системе низкотемпературной воды.
При работе обоих вентиляторов вместе с двумя теплообменниками достигается 100% охлаждение. В воздуховодах охлаждающего воздуха предусмотрены воздушные фильтры.
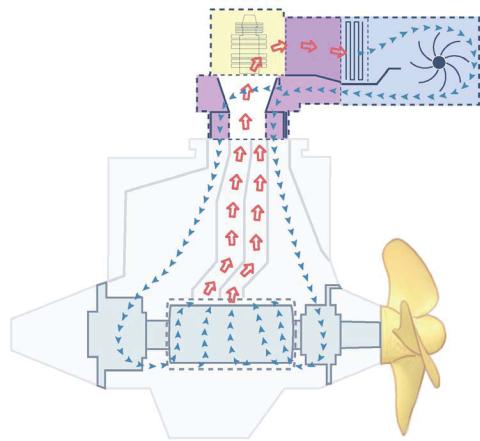
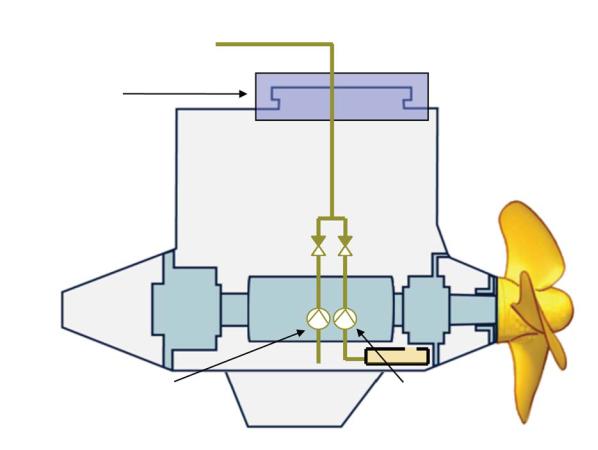
Рисунок 4-11 Система воздушного охлаждения электродвигателя гребного винта
22 Представление продуктов Azipod® серии VI

4.7Валопровод
Роликоподшипники валопровода (упорный и гребного винта) частично заполнены смазочным маслом и смазываются из маслосборника в контуре принудительной циркуляции. Обработка циркулирующего масла выполняется в двух блоках подготовки масла (OTU). Обработка масла заключается в фильтрации и стабилизации температуры. Оба блока также осуществляют контроль относительного содержания воды в смазочном масле с помощью сенсорного устройства.
Трубопроводы циркуляции масла проложены через поворотный узел жидкости к блоку OTU и назад к подшипникам. Данные по уровню и температуре масла передаются в судовую автоматизированную систему (MAS).
OTU 1 |
|
OTU 2 |
|
GTU |
|
ACU Блок |
(неприводная |
|
(приводная |
|
Напорный |
|
управления |
сторона) |
|
сторона) |
|
бак |
|
подачей воздуха |
|
|
|
|
|
|
|
Поворотный узел |
|
|
|
|
жидкости |
|
Резервуары масла |
||
(в SRU) |
|
|||
|
для уплотнений |
|||
|
|
|||
|
|
|
|
|
|
|
|
|
|
Упорный |
|
|
|
|
|
|
Подшипник гребного |
|
|
подшипник |
|
|
|
|
|
|
винта |
|
|
(неприводная |
|
|
|
|
|
|
(приводная сторона) |
|
|
сторона) |
|
|
|
|
|
|
|
|
|
|
Смазка из |
|
|
|
|
Уплотнения |
|
|
маслосборника |
|
|
|
|
|
гребного вала |
Рисунок 4-12 Общий вид валопровода |
|||
|
|
|
|
Подсистема уплотнений валопровода Azipod состоит из уплотнений для валопровода гребного винта, упорного подшипника и подшипника гребного винта. Резервуары масла для уплотнений, напорный бак (GTU) и блок управления подачей воздуха (ACU) также входят в состав подсистемы уплотнения валопровода.
Для удержания гребного вала во время технического обслуживания предусмотрен гидравлический дисковый тормоз. Тормоз подключается вручную и активируется от HPU. Удерживающая способность зависит от конструкции гребного винта. Максимальная допустимая скорость судна относительно воды при приложении тормоза вала зависит от конструкции гребного винта. Тормоз нельзя использовать (как правило) при выполнении ледовых операций.
Представление продуктов Azipod® серии VI 23
4.8Функциональные возможности осушительной системы
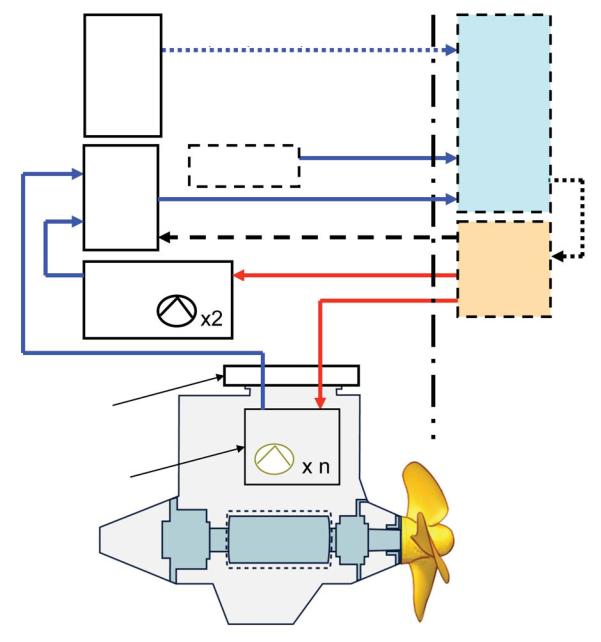
В движительном модуле Azipod есть своя дренажная подсистема для удаления смазочных масел вала и для осушения возможных протечек масла или воды из движительного модуля.
Два осушительных насоса размещены в самой нижней точке движительного модуля Azipod. Один из насосов предназначен для осушения сливного бака, расположенного на дне гондолы. Второй насос предназначен для осушения непосредственно движительного модуля. Насосы через невозвратные клапаны подключены к линии осушения, которая проложена через поворотный узел жидкости в отделение Azipod и далее выведена в судовую осушительную систему. Питание на насосы подается от судового аварийного распределительного щита. Данные от датчиков уровня в гондоле через AIU передаются в судовую автоматизированную систему управления (MAS).
(К судовой осушительной
системе)
Шарнирное
соединение (в SRU)
Осушительный |
Осушительный |
насос модуля |
насос бака |
Рисунок 4-13 Осушительная система |
|
24 Представление продуктов Azipod® серии VI
5 Условия окружающей среды
5.1Система Azipod
• |
Расчетная температура забортной воды |
-2 - + 32°C. |
• |
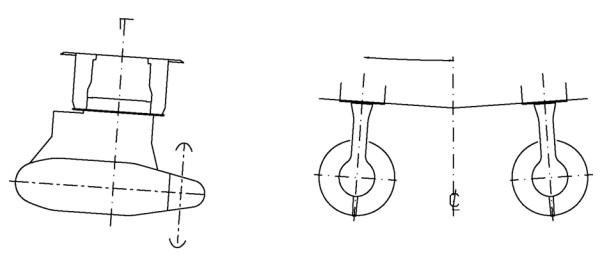
Максимальный результирующий монтажный угол (продольный и поперечный) |
4° |
•ПРИМЕЧАНИЕ: Максимально допустимый суммарный угол монтажного угла
и угла наклона (см. указания размеров для Azipod) составляет |
6° |
•Azipod классифицируется как замкнутое пространство, требуещее наличия допуска для входа персонала. Если предусматривается допуск персонала, использование средств пожаротушения, приводящих к асфиксии, в движительном модуле Azipod не допускается.
Монтажный угол
Монтажный угол
Рисунок 5-1 Монтажные углы (продольный и поперечный)
5.2Требования к помещениям для системы Azipod
•Расчеты аналогичны расчетам для машинного отделения с достаточным кондиционированием воздуха.
• |
Нормальная температура окружающего воздуха |
+2 ...+ 45°C, |
• |
Относительная влажность окружающего воздуха |
Конденсация на любых узлах не допускается. |
Представление продуктов Azipod® серии VI 25
6 Сопряжение с судовыми ситемами
(Групповая сигнализация)
Сигнали- |
|
|
зация ру- |
|
|
Судовая |
||
левого ме- |
||
автомат. |
||
ханизма |
||
система |
||
|
||
|
управл. |
|
|
|
Шкаф AIU
Блок управления ГЭУ Команды
и информация
Статус электроприводов
|
|
|
Судовой |
|
|
|
пост управ- |
Блок |
Вентиля- |
|
ления элек- |
воздуш. |
торы: |
Контролируемые источники питания |
троприво- |
охлажд. |
|
|
дами |
(CAU) |
|
|
|
Блок
контактных колец (SRU)
(Насосы и датчики)
ABB |
Судоверфь |
Рисунок 6-1 Типовое сопряжение с судовыми системами
26 Представление продуктов Azipod® серии VI
6.1Сопряжение с судовой автоматизированной системой
Управление вспомогательными функциями поставленной системы Azipod осуществляется судовой автоматизированной системой (MAS). Для этого обеспечивается сопряжение. Поставщик системы MAS и судоверфь вместе с АВВ согласовывают соответствующую спецификацию входных и выходных данных, а также вывод необходимой визуальной информации на экран дисплея оператора системой MAS.
Система MAS управляет следующими функциями:
1.Управление вспомогательными механизмами движительной установки
2.Упрвление подсистемой воздушного охлаждения
3.Групповой контроль и сигнализация, приходящая от независимых подсистем ABB, подробное описание и размеры которых уточняются на этапе разработки проекта.
Для сопряжения Azipod с судовой системой автоматизации применяется протокол передачи данных Modbus RTU, где ABB работает в режиме ведущей станции.
6.2Сопряжение с судовыми вспомогательными источниками питания
Судоверфь обеспечивает работу пусковых устройств электродвигателей всех вспомогательных устройств Azipod. АВВ требует от центра управления электроприводами (МСС) судоверфи потенциально свободные (включающего реле) бинарные контакты в качестве выходной информации о состоянии, в жестко разведенной проводке.
Представление продуктов Azipod® серии VI 27
7Система ручного дистанционного управления
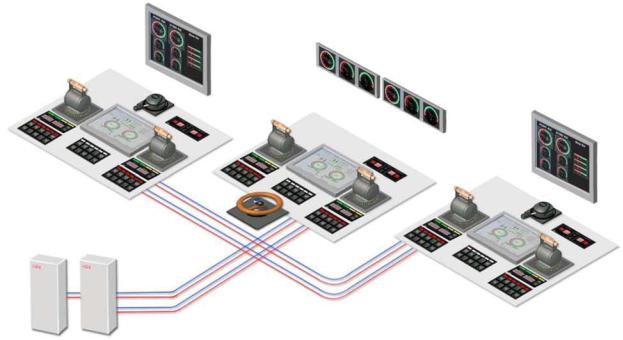
Объем поставки Azipod улучшен за счет системы ручного дистанционного управления ABB «IMI» (Интеллектуальный интерфейс маневрирования) и системы указаний оператору. Это обеспечивает современное оборудование ручного управления для Мостика и Центрального Поста Управления, которое может быть установлено в различные мостиковые пульты, имеющиеся на рынке судостроения сегодня и поставляемые третьей стороной. Ручные средства управления предназначены для установки в пульты, расположенные внутри помещений.
Система дистанционного управления обеспечивает оперативную информацию для оператора и обратную связь для оптимального использования системы Azipod. Цель данной функциональной возможности - обеспечить экономичную бесперебойную эксплуатацию судна.
Такая система на основе шины спроектирована с резервированием и разработана компанией ABB Marine самостоятельно. Сюда также включена дублирующая подсистема. Может быть предоставлено большое разнообразие различных конфигураций управления модулями, в том числе опциональные функции смены командного поста и поста управления для внешней системы носовых ПУ.
Для подключения внешнего авторулевого, внешнего джойстика /системы ДП и регистратора данных рейса предусмотрены обычные промышленные стандартные сопряжения.
Рисунок 7-1 Типовой вид дистанционного управления
28 Представление продуктов Azipod® серии VI
ЛЕВАЯ ВЕРХНЯЯ |
ЦЕНТРАЛЬНАЯ |
ПРАВАЯ ВЕРХНЯЯ |
ПАНЕЛЬ |
ВЕРХНЯЯ |
ПАНЕЛЬ |
|
ПАНЕЛЬ |
|
КОНСОЛЬ ЛЕВОГО |
ЦЕНТРАЛЬНАЯ |
КОНСОЛЬ ПРАВОГО |
КРЫЛА МОСТИКА |
КОНСОЛЬ |
КРЫЛА МОСТИКА |
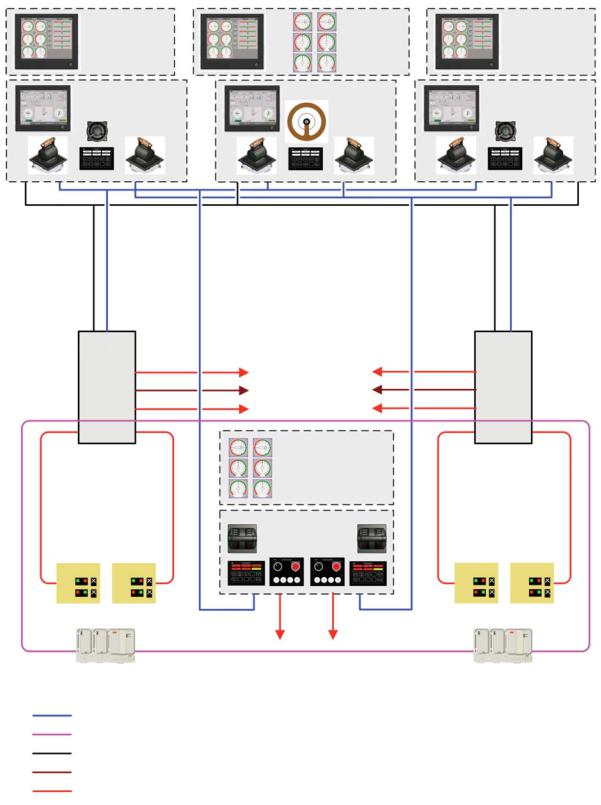
RCU
Синусоидально- |
косинусоидальные |
команды |
(аппаратно |
реализуемые) |
Сервоприводы рулевого механизма (лев)
ВНЕШНИЙ
ВХОД/ВЫХОД NMEA ВНУТРЕННИЙ ВХОД/ВЫХОД
ЦПУ Вертикал.
ЦПУ горизонт.
К блоку управления ГЭУ
RCU
Синусоидально- |
косинусоидальные |
команды |
(аппаратно |
реализуемые) |
Сервоприводы рулевого механизма (прав.)
|
Сеть управления ГЭУ |
|
Блок управления ГЭУ (левый) |
(Ethernet MMS) |
Блок управления ГЭУ (правый) |
Шина CAN open (одиночная или двойная)
Ethernet,волоконно-оптическое кольцо
Ethernet, RJ45
Последовательная шина RS232 / RS485
Жестко закрепленный
Рисунок 7-2 Типовой пример архитектуры дистанционного управления
Представление продуктов Azipod® серии VI 29
8 Разработка проекта судна
Ниже описывается обычный процесс разработки проекта судна с Azipod, выполняемый верфью: См. также главу 2.
8.1Алгоритм проектирования
A.После определения общего расположения судна движительный модуль Azipod выбирается на основании требований к упору или крутящему моменту гребного винта.
B.Далее выбирается рулевой модуль на основе крутящего момента, обычно определяемого мощностью гребного винта, высотой основной стойки и скоростью хода судна. Следует уточнить мощность силовой установки судна, которая должна обеспечить работу двух модулей.
C.Вспомогательные устройства выбираются для установки с движительным и рулевым модулями. Как и выше все требования к резервированию должны быть согласованы в пределах указанных опций.
D.Выполняются расчеты для помещения Azipod (с надлежащим определением противопожарной зоны).
E.Прорабатываются сопряжения системы с выделением постов судовой системы автоматизации.
F.Задается конфигурация расположения средств управления судном.
8.2Выполнение технического проектирования системы Azipod
В общем случае судостроителю понадобятся такие же технические ресурсы, какие требуются и для полного интегрирования, например системы бортовых стабилизаторов, хотя объем работ по объединению в общую систему будет большим. Ниже приводится рекомендуемый оптимальный перечень работ и специалистов. Некоторые из перечисленных задач могут выполняться одним и тем же специалистом:
A.Инженер-координатор (движитель общего назначения, рулевое устройство и вспомогательное оборудование).
B.Проектировщик конструкций для сопряжения с корпусом (сталь / набор корпуса судна).
C.Специалист по сопряжению силовой установки (в общем случае требуется знание электроэнергетической установки).
D.Управление техническими средствами машинного отделения / пусконаладочными работами (судовой инженер-механик или инженермашиностроитель).
E.Координатор по автоматизации (отвечает за сопряжение со средствами автоматизации на судне).
F.Сопряжение навигационных средств / средств управления (специалист по электронике / специально подготовленный судоводитель).
30 Представление продуктов Azipod® серии VI