

azipod_vi_project_guide_ru
.pdfПредставление движителей Azipod® серии VI
Предисловие
В данной брошюре представлены сведения о системе и информация для предварительной разработки проекта оснащения судна движительно-рулевой системой Azipod. Кроме того, наши отделы проектирования и сбыта готовы дать консультацию по более специфичным вопросам, касающимся нашей продукции и установки компонентов системы.
Продукция нашей компании постоянно дорабатывается и модернизируется в соответствии с развитием технологий и изменением требований клиентов. Вследствие этого мы оставляем за собой право на внесение изменений в любые сведения и информацию, представленные в данной брошюре, без предварительного уведомления.
Все сведения в данном издании носят исключительно ознакомительный характер. Вопросы по конкретному проекту согласовываются отдельно, поэтому любая информация, приведенная ниже, не может составлять часть соглашения или контракта.
Хельсинки, март 2010 г.
ABB Oy, Marine
Merenkulkijankatu 1 / P.O. Box 185 00981 Хельсинки, Финляндия, Тел.: +358 10 22 11
http://www.abb.com/marine
Azipod является зарегистрированной товарной маркой компании ABB Oy. © 2005 ABB Oy. Авторские права защищены
Док.№ 3AFV6019310 Проект A / 12 марта 2010 г.
2Представление продуктов Azipod® серии VI
Оглавление
Предисловие |
2 |
|
Оглавление |
3 |
|
1 Общие сведения |
5 |
|
1.1 |
Движительная и рулевая система Azipod |
5 |
1.2 |
Типовое обозначение продуктов Azipod |
6 |
1.3 |
Электрическая движительная и силовая установка |
7 |
2 Azipod на судах ледового класса |
8 |
|
2.1 |
Общие сведения |
8 |
2.2 |
Azipod и суда, работающие по системе двойного действия |
8 |
2.3 Принципы разработки Azipod VI |
9 |
|
2.4Задание размеров в соответствии с различными
ледовыми правилами |
11 |
2.5Список судов ледового класса с установленными
|
|
модулями Azipod |
11 |
3 |
Объем поставки |
12 |
|
|
3.1 |
Общие сведения |
12 |
|
3.2 |
Поставляемые компоненты Azipod |
12 |
|
3.3 |
Поставляемые судовые компоненты |
12 |
4 |
Технические данные |
14 |
|
|
4.1 |
Размеры и массы |
14 |
|
4.2 |
Расчетные объемы масла для одной системы Azipod |
17 |
4.3Потребители вспомогательного питания для каждой
системы Azipod |
17 |
4.4Излучение теплоты, приводящее к нагреву
помещения Azipod |
18 |
4.5 Рулевой механизм |
19 |
4.6Система охлаждения электродвигателя гребного
винта |
22 |
4.7 Валопровод |
23 |
4.8Функциональные возможности осушительной
|
|
системы |
24 |
5 |
Условия окружающей среды |
25 |
|
|
5.1 |
Система Azipod |
25 |
|
5.2 |
Требования к помещениям для системы Azipod |
25 |
6 |
Сопряжение с судовыми сиcтемами |
26 |
|
6.1Сопряжение с судовой автоматизированной
системой |
27 |
6.2Сопряжение с судовыми вспомогательными
|
|
источниками питания |
27 |
7 |
Система ручного дистанционного управления |
28 |
|
8 |
Разработка проекта судна |
30 |
|
|
8.1 |
Алгоритм проектирования |
30 |
|
8.2 |
Выполнение разработки технической системы Azipod |
30 |
|
8.3 |
Гидродинамика |
31 |
|
8.4 |
Расположение Azipod на корпусе судна |
31 |
|
8.5 |
Гребной винт |
31 |
|
8.6 |
Силы, действующие на корпус судна |
31 |
|
8.7 |
Условное обозначение стороны перекладки руля |
32 |
9 |
Пример движителя Azipod с силовой установкой |
33 |
|
10 Перечень данных для получения коммерческого |
|
||
|
предложения на систему |
34 |
|
Представление продуктов Azipod® серии VI 3

Аббревиатуры, объяснение которых не дается в тексте документа
ABS |
Американское бюро судоходства |
|
BV |
Бюро Веритас |
|
DNV |
Det Norske Veritas |
|
АРЩ |
Аварийный распределительный щит |
|
МАКО |
Международная ассоциация классификационных |
|
обществ |
||
|
||
GA |
Общее расположение |
|
кВА |
Киловольт Ампер |
|
LRS |
Регистр судоходства Ллойда |
|
ГРЩ |
Главный распределительный щит |
|
МВт |
Мегаватт |
|
РМРС |
Российский морской регистр судоходства |
|
Об/мин |
Обороты в минуту |
4Представление продуктов Azipod® серии VI

1 Общие сведения
Первая система Azipod® была введена в эксплуатацию на борту судна в 1990 г. К февралю 2010 г. суммарная наработка установленного оборудования достигла цифры 5,2 миллионов часов.
1.1Движительная и рулевая система Azipod
Azipod представляет собой размещенный в гондоле главный электрический движитель и рулевой механизм, приводящий в движение винт фиксированного шага с различными скоростными режимами. Система главного движителя и рулевого механизма Azipod серии VI – это модификация классического продукта Azipod для работы во льдах.
Движитель Azipod разработан для преимущественного использования гребного винта тянущего типа (с непосредственным приводом) при движении судна носом вперед. Продукты семейства Azipod V могут вращаться (управлять направлением движения вокруг своей вертикальной оси) без ограничений на 360° и предназначены в основном для работы в диапазоне номинальной мощности 6 - 21 МВт в зависимости от размеров платформы, ледовых условий и конструкции гребного винта.
Полная система, устанавливаемая на судне, состоит из требуемого числа движительных модулей с функцией рулевого управления Azipod плюс поставка силового частотного преобразователя морского исполнения серии «ACS» для каждого движителя Azipod. Дополнительно в объем поставки обычно входят трансформаторы движительной установки (при необходимости), система дистанционного управления и силовая установка (генераторы, распределительные щиты).
SteeringРулевойModuleмодуль
PropulsionДвижительныйModuleмодуль
Рисунок 1 -1 Базовое расположение Azipod VI
Представление продуктов Azipod® серии VI 5
1.2Типовое обозначение модулей Azipod
На стадии концептуального проектирования судна используются следующие основные обозначения. (Более точный код типа присваивается продукту на последующей стадии проектирования).
V = «Классический» Azipod
X = Azipod следующего поколения (в специальных публикациях)
C = «Компактный» Azipod (в специальных публикациях)
I = Проект для использования в ледовых условиях
O = Проект для использования на открытой воде (в специальных публикациях) C = Проект «Гребные винты противоположного вращения» (в специальных
публикациях)
Диаметр гребного двигателя (мм)
«S», «M» или «L» = Длина (синхронного) гребного двигателя «A» = Синхронный гребной двигатель
Azipod® xxxx y
Например, Azipod® VI 1600 A
…означает Azipod для использования во льдах с мощностью на валу в нижних пределах диапазона мощности (например, 5 МВт ), построенный с асинхронным гребным двигателем.
6Представление продуктов Azipod® серии VI

1.3Электрическая движительная и силовая установка
Для работы движительной системы Azipod на судне должна быть электросиловая установка (в данном документе не рассматривается). Генераторы переменного тока подают на распределительные щиты (РЩ) напряжение частотой 50 или 60 Гц для обеспечения всех судовых потребителей, включая движитель Azipod.
Вобщем случае ABB предлагает поставку силовой установки вместе с системой Azipod. Наше устройство механического сопряжения с первичным двигателем является серийным, хотя и зависит от варианта установки, например дизелей или газовых турбин.
Входе всего проекта главным средством разработки силовой установки является так называемая однолинейная схема. Она дает четкое и наглядное представление о предполагаемой судовой конфигурации уже на начальных этапах проектирования.
Судовые системы автоматики и дистанционного управления
|
|
G |
|
|
G |
|
|
G |
|
|
G |
Объем поставки |
Судовой частотный |
|
Azipod® |
преобразователь ACS6000 |
Силовая установка |
Рисунок 1-2 Упрощенная однолинейная схема силовой установки и движительной системы
Представление продуктов Azipod® серии VI 7
2 Azipod на судах ледового класса
2.1Общие сведения
Суда ледового класса можно разделить на две основные группы:
•суда ледового плавания
•ледокольные суда
Ледокольные суда делятся еще на две группы: ледоколы и буксиры ледового класса.
Суда ледового плавания предназначены для работы на открытой воде, но их корпусные конструкции усилены, а машинное оборудование зачастую имеет большую мощность по сравнению с обычными судами, используемыми на открытой воде. Способность плавания во льдах обычно не является определяющим фактором при разработке проекта таких судов. Важно определение технических характеристик для работы на открытой воде. Ледовый класс выбран для обеспечения достаточной прочности и мощности судна, чтобы оно могло безопасно плавать во льдах под проводкой ледокола. Примерами таких судов могут служить все суда, работающие в настоящее время в северной части Балтийского моря в течение зимнего периода: паромы, балкеры, суда типа ро-ро.
Для ледокольных судов способность плавания во льдах является решающим фактором с точки зрения функциональности. Независимая работа, т.е. работа без дополнительной помощи со стороны ледоколов, занимает большую часть их рабочего времени. Способность к ледовому плаванию определяется (обычно в очень жестких ледовых условиях) техническими требованиями к судну. Кроме того, такие суда, как правило, имеют гарантию судоверфи для выполнения операций во льдах, что часто подтверждается полномасштабными испытаниями в ледовых условиях. Примерами такого типа судов могут служить ледоколы, универсальные ледоколы и некоторые танкеры, грузовые и научно-исследовательские суда, специально предназначенные для работы в покрытых льдом водах.
2.2Azipod и суда, работающие по системе двойного действия
С давних пор общеизвестно, что движение судна кормой вперед во льдах позволяет улучшить способность к плаванию во льдах. Это происходит вследствие эффекта обмывания кормы судна кильватерной струей от гребного винта. Также общеизвестно, что рули можно повредить, а рулевое управление может быть затруднено при движении кормой вперед в ледовых условиях.
Движитель Azipod дает возможность создания судна с превосходными ледокольными характеристиками при сохранении возможности рулевого управления в полном объеме для случаев движения кормой во льдах. Теперь нос ледокола может быть спроектирован для обеспечения оптимальной работоспособности судна на открытой воде, а сам ледокол может совмещать оптимальные характеристики для операций во льдах и на открытой воде
– задача, традиционно считавшаяся нерешаемой. Данная концепция, запатентованная компанией Aker Arctic Technology Inc., воплощена в так называемых «судах двойного действия» (Double Acting Ships, DAS).
Движение судна вперед кормой с гребным винтом (винтами) впереди особенно эффективно при приближении к зонам прохода через сплошные ледяные торосы. Гребной винт (винты) дробят подводную часть тороса на куски льда и разгоняют их, вытесняя струей от гребного винта, таким образом, судно медленно идет через поле торосов.
8Представление продуктов Azipod® серии VI
2.3Принципы разработки Azipod VI
Наиболее очевидное преимущество электрической гребной установки на ледокольных судах - это крутящий момент электрического двигателя. Электрический двигатель и сопряженный преобразователь переменной частоты могут быть спроектированы таким образом, чтобы обеспечивать максимальный крутящий момент при низких значениях частоты вращения гребного винта и даже при его остановке. Отсутствие механической связи между силовой установкой и электрическим двигателем, приводящим в движение гребной винт, дает возможность создания оптимальной движительной установки для ледокола.
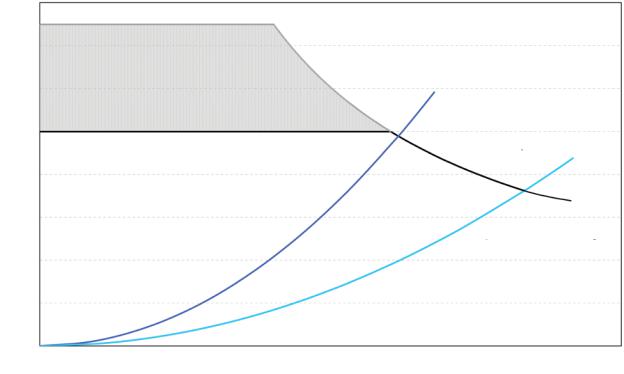
Гребной электродвигатель, используемый на Azipod серии VI, способен передавать 100% мощность на гребной винт в условиях испытаний при работе на швартовых. Если требуется для ледовых операций, гребной электродвигатель может иметь размеры, подходящие для циклической по моменту работы. На рисунке ниже представлена типовая схема зависимости крутящего момента от частоты вращения.
Дополнительный циклический крутящий момент для ледокольных операций
100%
Крутящий момент |
электродвигателя |
Постоянный крутящий момент |
Кривая при постоянной мощности |
Кривая при испытаниях на швартовых
Кривая при свободном вращении
Частота вращения гребного винта
Рисунок 2-1 Зависимость крутящего момента от частоты вращения электродвигателя привода и гребного винта
Максимальная эффективность Azipod VI обычно выражается как отношение между мощностью гребного винта и полезной тягой в условиях испытаний при работе на швартовых. Поэтому, фактическая эффективность конкретного типоразмера, которая может варьироваться в зависимости от, например, усиления и диаметра гребного винта, показана на следующем рисунке:
Представление продуктов Azipod® серии VI 9

Тяга модуля Azipod (кН)
* Проверить доступность в ABB
Мощность модуля Azipod [кВт)
Рисунок 2-2 График зависимости тяги при испытаниях на швартовых от мощности гребного винта для различных типоразмеров
Как известно, среди преимуществ электрического движителя:
•Подходящие характеристики крутящего момента
•Динамическая характеристика
•Резервирование
•Возможность динамического позиционирования судна (если применимо) Кроме того, конструкция Azipod VI предлагает следующие преимущества:
•Повышенная маневренность в тяжелых ледовых условиях - возможность поворота на 360° обеспечивает полный крутящий момент и тягу в любом направлении, полный крутящий момент также доступен при скорости обратного хода.
•Надежная механическая конструкция – один короткий вал и отсутствие конических передач означает, что максимальный крутящий момент электрического двигателя может быть полностью использован без механических ограничений.
•Прочность и жесткость – корпус Azipod с рамной конструкцией выдерживает высокие ударные нагрузки при работе во льдах. Жесткий валопровод снижает риск резонанса во время дробления льда.
•Свобода при разработке проекта судна - Azipod обеспечивает большую гибкость проекта и возможность экономии объемов в корме судна
10 Представление продуктов Azipod® серии VI